用于机动车的驻车锁止机构
文献发布时间:2024-01-17 01:18:42
技术领域
本发明涉及一种机动车中的、尤其是电动车辆中的驻车锁止机构。
背景技术
在此情况下,驻车锁止机构可理解为用于形锁合地锁定驱动轴的机构,驱动轴至少在驱动轴被锁定的状态中与机动车的至少一个驱动轮或与驱动桥持久地耦联。驻车锁止机构本身由现有技术、尤其是自动变速器已知。在这种变速器中,尤其是当为自动变速器选择驻车模式、即所谓的“P”模式(P N R D)时,自动变速器中的输出轴通常可与变速器壳体形锁合地耦联。
由DE 102015211367 A1已知一种具有中央同步装置的车辆的自动变速器和一种用于运行自动变速器的方法,在该变速器中可实现具有自锁组件的驻车锁止功能。
发明内容
驻车锁止功能的实现通常需要机械上耗费的机构。本发明的任务是给出一种简单的驻车锁止机构,该任务通过根据权利要求1的驻车锁止机构来解决,本发明的优选扩展方案是从属权利要求的技术方案。
在本发明的意义中,用于机动车的驻车锁止机构可理解为用于形锁合地锁定驱动轴的装置,该驱动轴设置用于将功率机械传递到机动车的至少一个驱动轮上。优选地,该驱动轴选择性地或优选持久地与所述至少一个驱动轮引导转矩地连接。尤其是通过这种设计,一旦驻车锁止器置入,驱动轮就借助驻车锁止机构形锁合地锁住。
此外,待锁住的驱动轴具有锁止区域,所述锁止区域优选构造为锁止轮(Sperrenrad),该锁止轮与驱动轴同心地定向并且该锁止轮进一步优选与驱动轴不可相对转动地连接或优选与驱动轴构造成一体的。此外,锁止区域这样构造,使得至少一个驻车棘爪选择性地嵌入该锁止区域中以形成形锁合连接。在功能上看,当驻车棘爪嵌入驱动轴的锁止区域中时,驱动轴和因此所述至少一个驱动轮被锁住。换言之,驻车锁止机构因此具有至少两种模式,其中第一模式可被视为“驻车锁止器置入”、即所谓的锁止模式,并且另一模式可被视为“驻车锁止器脱开”、即所谓的行驶模式,在第一模式中驱动轮形锁合地被锁住并且在第二模式中不是这种情况,相反地,在第二模式中驱动轴可转动并且所述至少一个驱动轮可通过驱动轴驱动。
此外,驻车棘爪可借助驻车锁止机构至少在两个位置之间运动。在锁止模式中,驻车棘爪运动到锁止位置中并且在该位置中与锁止区域形成形锁合连接以锁住驱动轴。此外,驻车锁止机构具有行驶模式,在该行驶模式中驻车棘爪运动到行驶位置中,在该行驶位置中驻车棘爪不与锁止区域形成形锁合连接,尤其是驱动轴在该模式中可转动以驱动机动车。
此外,驻车棘爪可围绕棘爪轴线枢转,以占据锁止位置或行驶位置。驻车锁止机构具有棘爪弹簧装置,该棘爪弹簧装置将驻车棘爪预紧到行驶位置中。尤其是在未被操作的状态中,棘爪弹簧装置将驻车棘爪保持在行驶位置中。为了改变驻车棘爪的位置,驻车锁止机构具有棘爪操作装置,该棘爪操作装置具有带有棘爪致动器轴的棘爪致动器并且具有棘爪锥形部。棘爪锥形部在此设置用于优选间接地或优选直接地将操作力施加到驻车棘爪上,在该操作力的情况下,驻车棘爪从行驶位置运动到锁止位置中。特别是为了提供施加到驻车棘爪上的操作力,棘爪锥形部可借助棘爪致动器沿锥形部轴线移动或运动。进一步优选地,棘爪锥形部关于锥形部轴线至少区段地具有锥形轮廓并且进一步优选地,棘爪锥形部与驻车棘爪接触,尤其是为了使驻车棘爪从行驶位置运动到锁止位置中。
该锥形部轴线平行于棘爪轴线定向并且因此尤其是通过棘爪锥形部的轮廓连同棘爪锥形部沿锥形部轴线的运动一起,驻车棘爪可围绕棘爪轴线枢转。棘爪锥形部可沿锥形部轴线运动到至少两个位置中,这些位置之中的一个位置可理解为所谓的锥形部锁止位置并且另一个位置可理解为锥形部行驶位置。此外,当驻车棘爪被棘爪锥形部接触并且棘爪锥形部位于锥形部锁止位置中时,驻车棘爪运动到锁止位置中或者说驻车棘爪在此情况下被棘爪锥形部克服棘爪弹簧装置的弹簧力挤压到锁止位置中。如果棘爪锥形部位于锥形部行驶位置中,则驻车棘爪被棘爪弹簧装置挤压到行驶位置中并且驱动轴的锁止区域可相对于棘爪转动。
为了使棘爪锥形部沿锥形部轴线移动,设置有锁止锥形部杠杆(Sperrkonushebel),该锁止锥形部杠杆间接或直接地与棘爪锥形部耦联并且该锁止锥形部杠杆还可借助棘爪致动器的棘爪致动器轴转动或枢转。锁止锥形部杠杆在此可由棘爪致动器轴自由转动。在本发明的意义中“可自由转动的锁止锥形部杠杆”可理解为:在该锁止锥形部杠杆上,尤其是当棘爪锥形部在锥形部锁止位置和锥形部行驶位置之间移位时,仅通过棘爪锥形部施加的力作用到锁止锥形部杠杆上,以及不可避免的支承力和惯性力。进一步优选地,“可自由转动”意味着,棘爪杠杆可至少在两个端点之间自由转动,尤其是不需要使得棘爪杠杆能实施完整的转动(360°及更大),由此该棘爪杠杆在本发明意义上可理解为可自由转动。尤其是没有机械的附加力作用到可自由运动或可自由转动的锁止锥形部杠杆上,如尤其是在锁止锥形部杠杆的卡锁的情况下可能出现的附加力。
这种卡锁尤其是可以设置用于优先考虑锁止锥形部杠杆的特定几何位置。这种优先可以设置用于减小驻车锁止机构中的“间隙”或在棘爪致动器故障时预定该机构的特定机械位置。与之相对,可自由转动的锁止锥形部杠杆提供以下优点:驻车锁止机构结构简单并且能实现对棘爪锥形部的均匀且精确的操控,因为棘爪锥形部可以在没有机械优先位置的情况下并且因此均匀地沿锥形部轴线运动。此外,可简单地检测驻车锁止机构,因为与在锁止锥形部杠杆上还作用不通过棘爪锥形部导入的(卡锁)力的情况下相比,在棘爪锥形部的运动和所施加的操作力之间存在更简单的关系,并且尤其是由此能实现所提出的驻车锁止机构的改进的故障监控。
在一种优选的实施方式中,在棘爪致动器轴与棘爪锥形部之间——就在它们之间的力传递而言——设置有具有解耦弹簧的解耦弹簧装置。尤其是所述解耦弹簧装置在至少一个力传递方向上使棘爪致动器轴与棘爪锥形部解耦。形象地说,在操作驻车锁止机构时,棘爪致动器轴间接或直接地将操作力输出给解耦弹簧装置,并且解耦弹簧装置将该操作力输出给棘爪锥形部。在棘爪锥形部不能运动的情况下——尤其是因为驻车棘爪不能或尚不能接合到锁止区域中——通过棘爪致动器轴的操作力首先预紧解耦弹簧装置的解耦弹簧,而棘爪锥形部不必运动,但棘爪锥形部将操作力施加到驻车棘爪上。如果驻车棘爪能够基于变化的几何条件在另一个时间点接合到锁止区域中并且因此在驻车棘爪与锁止区域之间建立形锁合连接,则棘爪锥形部在来自解耦弹簧装置的操作力下运动到锥形部锁止位置中并且在此使驻车棘爪转动到锁止位置中。尤其是借助这种解耦弹簧装置,一方面可以使驻车棘爪可靠地接合到锁止区域中并且另一方面可以使棘爪致动器轴与力冲击解耦,如当驻车棘爪与锁止区域碰撞并且还没有与其建立形锁合连接时可能出现的力冲击。
在具有解耦弹簧装置的驻车锁止机构的一种优选实施方式中,所述解耦弹簧在从棘爪致动器轴到锁止锥形部杠杆上的力传递方向上设置在棘爪致动器轴与锁止锥形部杠杆之间。进一步优选地,解耦弹簧构造为扭转弹簧或螺旋弹簧,并且进一步优选地,这种解耦弹簧通过棘爪致动器轴相对于锁止锥形部杠杆转动而被预紧并且可被理解为致动器解耦弹簧。进一步优选地,从棘爪致动器轴到锁止锥形部杠杆上的力传递在按计划的运行期间至少暂时或优选持久地且至少基本上借助解耦弹簧发生。优选地,锁止锥形部杠杆可转动地支承在棘爪致动器轴上并且借助解耦弹簧与棘爪致动器轴机械耦联以传递操作力,换言之,因此,可借助解耦弹簧将操作力从棘爪致动器轴传递到锁止锥形部杠杆上。尤其是,可转动支承且与解耦弹簧耦联的锁止锥形部杠杆是一种特别节省空间的布置结构,用以在棘爪致动器轴和作为用于驻车棘爪的操作元件的棘爪锥形部之间提供解耦功能。
在一种优选实施方式中,所述解耦弹簧或优选另外的解耦弹簧在从锁止锥形部杠杆到棘爪锥形部上的力传递方向上设置在锁止锥形部杠杆与棘爪锥形部之间。优选地,该间接或直接地设置在锁止锥形部杠杆与棘爪锥形部之间的解耦弹簧或另外的解耦弹簧构造为螺旋弹簧或多个碟形弹簧的组合件并且可被理解为杠杆解耦弹簧。进一步优选地,这种解耦弹簧通过(由棘爪致动器轴驱动的)锁止锥形部杠杆相对于棘爪锥形部的运动被预紧,尤其是当棘爪锥形部在其沿锥形部轴线的运动中被锁住时。进一步优选地,从锁止锥形部杠杆到棘爪锥形部上的力传递在按计划的运行期间至少暂时或优选持久地、至少基本上借助该解耦弹簧发生。优选地,锁止锥形部杠杆不可相对转动地接纳在棘爪致动器轴上并且借助解耦弹簧间接或直接地与棘爪锥形部机械耦联,以用于将操作力传递到棘爪锥形部上。换言之,因此可借助所述解耦弹簧将操作力从锁止锥形部杠杆传递到棘爪锥形部上。这种解耦弹簧和因此锁止锥形部杠杆与棘爪锥形部的弹性耦联尤其是一种用于提供解耦功能的特别简单且运行可靠的布置结构。
在一种优选实施方式中,所述棘爪锥形部沿锥形部轴线可移动地支承在棘爪芯轴上,棘爪锥形部在棘爪芯轴上被杠杆解耦弹簧挤压到棘爪芯轴上的终端位置中。优选地,杠杆解耦弹簧构造为压力弹簧。进一步优选地,杠杆解耦弹簧因此间接地设置在锁止锥形部杠杆和棘爪锥形部之间。尤其是,这种布置结构能实现特别简单的安装,因为棘爪芯轴连同安装在其上的棘爪锥形部和杠杆解耦弹簧可作为组件被安装并且能实现该组件在锁止锥形部杠杆上的特别简单的安装。
在一种优选实施方式中,棘爪致动器构造为自锁的致动器。在本发明的意义中,“自锁的致动器”尤其是可理解成这样的致动器,即,该致动器在没有以功率、尤其是电流和电压进行外部加载的情况下保持棘爪致动器轴的位置,即使运行力——尤其是通过锁止锥形部杠杆——作用到棘爪致动器轴上。尤其是借助本发明的这种特征能实现驻车锁止机构的简单结构,因为不需要附加的、尤其是机械的锁定来维持棘爪致动器轴的特定位置。
在本发明的一种优选实施方式中,棘爪致动器具有用于确定棘爪致动器轴的位置的棘爪传感器。进一步优选地,棘爪传感器构造为转动角传感器。尤其是借助棘爪传感器可检测棘爪致动器轴的位置并且因此能实现监控棘爪致动器的功能。
附图说明
下面借助附图详细阐述本发明的多个单个的特征及其优选的实施方式,在此不同于所示特征组合的其它特征组合原则上也是可行的。
附图中:
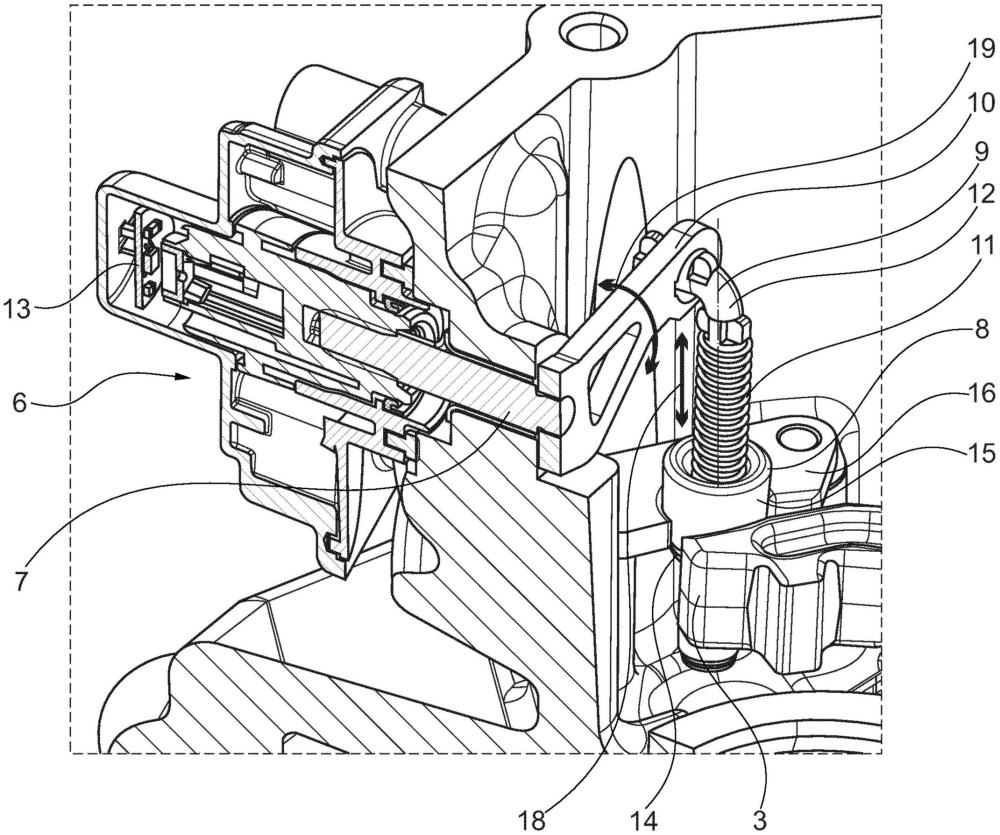
图1示出驻车锁止机构的透视性的局部剖视图;
图2示出驻车锁止机构的俯视图。
具体实施方式
在图1中示出驻车锁止机构的透视性局部剖视图,在此待借助该机构锁止的或待形锁合地锁定的驱动轴在该图中未示出。
棘爪致动器6是转动致动器,其具有棘爪致动器轴7以用于将操作力输出到棘爪锥形部8上。棘爪致动器6构造为自锁的致动器,这应理解为在棘爪致动器6关断时,棘爪致动器轴7的位置在没有来自棘爪致动器6之外的能量供应(尤其是电流、电压)的情况下得到维持,即使力——尤其是由棘爪锥形部8——施加到锁止锥形部杠杆10上。棘爪致动器6中的自锁尤其是可以通过棘爪致动器6中的摩擦条件
此外,棘爪致动器6具有棘爪传感器13,借助该棘爪传感器可检测棘爪致动器轴7的位置并且因此可监控驻车锁止机构的运行状态。棘爪致动器6以剖切状态示出。锁止锥形部杠杆10不可相对转动地设置在棘爪致动器轴7上并且可借助该棘爪致动器轴沿棘爪杠杆方向19枢转。棘爪致动器轴7的转动运动因此导致锁止锥形部杠杆10的运动。棘爪芯轴12与锁止锥形部杠杆10运动学地耦联。棘爪锥形部8设置在棘爪芯轴12上,该棘爪锥形部至少区段地具有锥形的外轮廓14,锥形部轴线9形成用于该锥形区段14的对称轴线。
棘爪锥形部8沿锥形部轴线9、即沿锥形部运动方向18可移动地支承在棘爪芯轴12上并且在所示实施方式中借助设计为压力弹簧的杠杆解耦弹簧11被向下预紧到一个位置中。因此,如果棘爪芯轴12通过锁止锥形部杠杆10沿锥形部运动方向18运动,并且没有或仅有小的力从驻车棘爪3作用到棘爪锥形部8上,则棘爪锥形部随着棘爪芯轴12一起运动。但如果驻车棘爪不能直接接合,特别是因为其尤其是由于锁止区域2的转动位置而不能嵌入锁止区域2中,则锁止锥形部杠杆10将棘爪芯轴12在图1所示的定向上向下推动,而棘爪锥形部8首先(尽管锁止锥形部杠杆10运动而仍)保持在其位置中并且杠杆解耦弹簧11被张紧。如果锁止区域2随后相对于棘爪3处于这样的位置中,使得该棘爪可以嵌入锁止区域2中以形成形锁合连接,则杠杆解耦弹簧11将棘爪锥形部8向下推压(参见图1中所示的定向)并使驻车棘爪3枢转到所示的锁止位置中。
在图1中的图示中,棘爪锥形部8处于其锥形部锁止位置中,驻车棘爪3贴靠在棘爪锥形部8的柱形区段15上并且由此克服棘爪弹簧装置5(参见图2)的弹簧预紧枢转到其锁止位置中。为了移动驻车棘爪3,棘爪锥形部8支撑在支座板材16上。
在图2中示出处于接合状态(锁止位置)中的驻车棘爪3,即驻车棘爪3与驱动轴1的锁止区域2形成形锁合连接并且驱动轴1被锁定或者说不可转动。驻车棘爪3可围绕棘爪轴线4沿枢转方向17运动,所述棘爪轴线与锥形部轴线8轴线平行且径向间隔开地设置。驻车棘爪3借助棘爪弹簧装置5被预紧到行驶位置(未示出)中。棘爪锥形部8沿锥形部轴线8移动以便置入驻车棘爪3并且支撑在支座板材16上,以便克服棘爪弹簧装置5的弹簧预紧而施加操作力。
换言之,所描述的驻车锁止机构在没有附加卡锁部的情况下起作用,因为锁止锥形部杠杆10可自由转动。卡锁部能实现支持定义的位置状态并确保该位置状态。所提出的驻车锁止机构尤其是省却了这种卡锁部。本发明提出,借助自锁的棘爪致动器能实现驻车锁止机构的定位,该棘爪致动器不会或不会在按计划的运行中借助经由棘爪杠杆10引入的力而从其操作位置(棘爪致动器轴的转动位置)运动出。在所示实施方式中,棘爪致动器6直接插接到致动机构上。
通过所提出的发明实现了:移除驻车锁止机构的附加构件和接口。棘爪致动器轴7的位置监控通过棘爪致动器6上的棘爪传感器13进行。因此,通过该机构的稳固的目标位置确保驻车锁止机构的参与运动传递的构件的公差链。
- 用于机动车的驻车锁止器
- 用于操纵自动变速器的驻车锁的装置以及用于这种自动变速器的驻车锁机构
- 用于机动车的传动系的驻车锁止组件和带有这样的驻车锁止组件的驱动单元
- 驻车锁止传动机构和用于运行驻车锁止传动机构的方法