一种风机外包装套箱系统及其控制方法
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及风机生产设备领域,具体涉及一种风机外包装套箱系统及其控制方法。
背景技术
风机是依靠输入的机械能,提高气体压力并排送气体的机械,广泛用于工厂、矿井、隧道、船舶和建筑物的通风、排尘和冷却中。风机在出厂前都需要进行套箱包装,目前风机的套箱方式均单纯依靠人工完成。随着生产需求的不断增加,人工套箱越来越无法满足生产需求,现有的套箱方式存在以下不足:
(1)人工套箱工作效率低,人工成本高;
(2)人工套箱可能损坏包装纸壳,影响整体外观,且降低工作效率;
(3)工人在套箱的过程中,来回走动,搬动设备,存在安全风险。
因此,为解决上述技术问题本发明公开了一种风机外包装套箱系统及其控制方法。
发明内容
为解决现有技术存在的不足,本发明提供了一种风机外包装套箱系统及其控制方法。
本发明的技术方案为:
本发明提供了一种风机外包装套箱系统,包括机械人模块及围绕所述机械人模块设置的带有定位结构的料架、倾斜定位台、二次定位台、带有左、右定中模块的输送线。
进一步,所述机械人模块包括机器人、纸壳治具。
进一步,所述纸壳治具包括主架体、主吸盘架、连接架、横向气缸、左、右挡架、若干上下气缸、若干主吸盘、若干侧吸盘、若干压力传感器、若干接近开关、真空发生器。
进一步,所述接近开关包括底座、探测杆、弹簧、探针、检测块。
进一步,所述倾斜定位台包括倾斜支架、倾斜板、设置在所述倾斜板边缘的“7”字型挡板,所述挡板的折角设置在所述倾斜板的最低点。
进一步,所述倾斜板的倾斜角度为45°~60°。
进一步,所述左、右定中模块均包括“T”字型定中支架、定中气缸、推板。
进一步,还包括控制系统,所述控制系统包括PLC控制器、液晶LCD、若干控制按钮。
一种风机外包装套箱系统的控制方法,包括以下步骤:
S1.参数设置,使用者向控制系统输入纸壳尺寸;
S2.放置纸壳,工人将一摞纸壳放置在料架上,并通过定位结构定位;
S3.抓取纸壳,机器人通过主吸盘从料架上抓取纸壳;
S4.初次定位,机械人将纸壳放置在倾斜定位台上并松开,纸壳在重力作用下自动滑落至倾斜板的最低点并被挡板挡住;
S5.精确抓取,机械人通过控制系统内储存的倾斜定位台尺寸信息、纸壳尺寸信息计算得到纸壳的精确位置,并通过主吸盘再次抓取纸壳;
S6.挡架张开,机械人将纸壳移至二次定位台上方,横向气缸伸出,右挡架向外侧移动,当左、右挡架之间的距离略大于定型后的纸壳长度时,横向气缸停止,同时上下气缸伸出,使左、右挡架对纸壳呈环抱之势;
S7.二次定位,缓慢降落纸壳,通过二次定位台的阻挡作用将纸壳定形为立方体,横向气缸收缩,左、右挡架上的侧吸盘吸住纸壳侧壁将纸壳形状定住;
S8.风机箱体定中,风机箱体由输送线输送到指定位置,然后左、右定中模块的推板同时伸出相同距离,将风机箱体定在指定位置后,推板收回;
S9.套箱,机械人将纸壳套在风机箱体上,风机箱体被输送到下一工序;
S10.重复S3~S9,同时在纸壳不足时,进行S2。
进一步,所述抓取纸壳的控制方法包括以下步骤:
S1.确定初始抓取位,真空发生器开启,机器人从初始位置每间隔3毫米向下探料,直到压力传感器和接近开关均发出信号,确定初始抓取位并记录;
S2.抓取搬运,当压力传感器检测到压力降低到设定值且持续一段时间后,即可确定主吸盘已经抓牢纸壳,然后进行后续套箱动作;
S3.再次抓取,根据初始抓取位计算下探距离,进行S2,不断重复本步骤。
本发明所达到的有益效果为:
本发明通过机器人进行套箱,不仅提高工作效率,节省人力成本。还因为机器人动作定位精度高,避免人为操作时出现的纸箱损坏现象,保证了纸箱的利用率和风机外观的美观性。
而且本发明可以配合其他工序整合到一处组装生产线中,不仅提高整体生产效率,且提高产地利用率,便于统筹管理。
此外,本发明在固定路径下工作可规避事故风险,提高安全生产系数。
本发明还为同种类型工况提供一种新型工作方式,弥补行业空缺。
附图说明
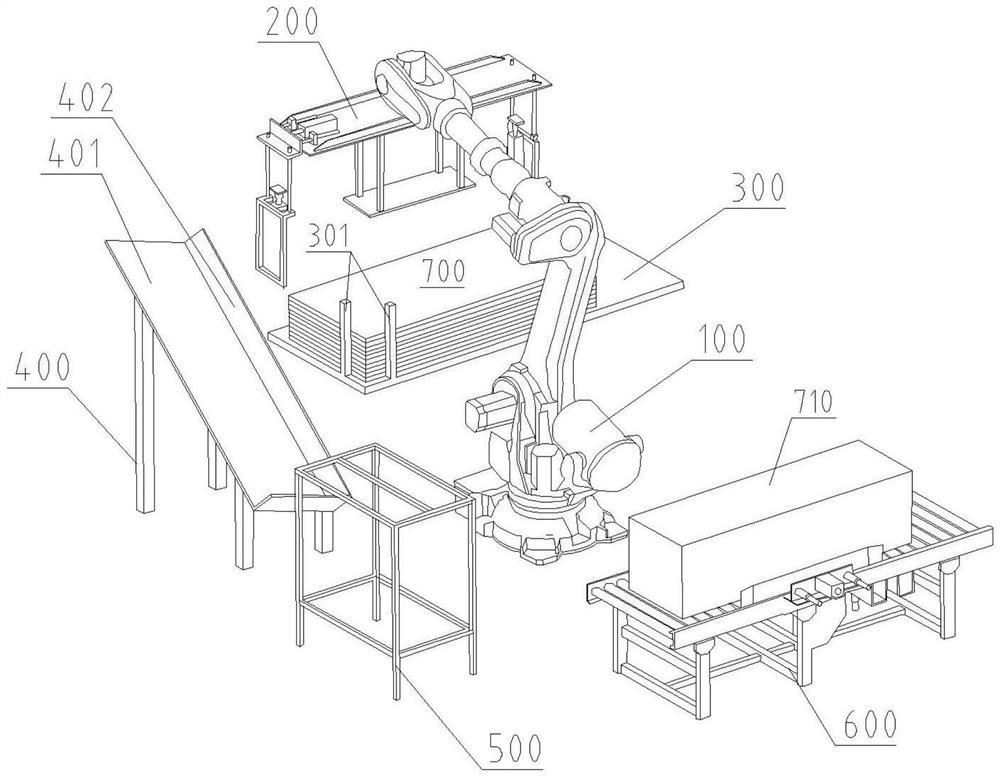
图1是本发明整体结构示意图。
图2是纸壳治具结构示意图。
图3是主吸盘架仰视图。
图4是接近开关结构示意图。
图5是输送线俯视图。
图6是风机外包装套箱系统的控制方法图。
图中,100、机器人;200、主架体;210、主吸盘架;211、主吸盘;220、接近开关;221、底座;222、探测杆;223、弹簧;224、探针;225、检测块;230、连接架;240、横向气缸;250、左挡架;260、右挡架;261、上下气缸;262、侧吸盘;300、料架;301、立柱;400、倾斜支架;401、倾斜板;402、挡板;500、二次定位台;600、输送线;610、定中支架;611、定中气缸;612、推板;700、纸壳;710、风机箱体。
具体实施方式
为便于本领域的技术人员理解本发明,下面结合附图说明本发明的具体实施方式。
如图1~6所示,本发明提供了一种风机外包装套箱系统,包括机械人模块及围绕所述机械人模块设置的带有定位结构的料架300、倾斜定位台、二次定位台500、带有左、右定中模块的输送线600。
所述机械人模块包括机器人100、与所述机械人可拆卸连接的纸壳治具,初始状态下所述纸壳治具位于料架300上方,所述机械人的型号为:ABB6700。所述纸壳治具包括主架体200、主吸盘架210、若干主吸盘211、若干接近开关220、连接架230、横向气缸240、左、右挡架260、若干导杆、若干上下气缸261、若干侧吸盘262、若干压力传感器、真空发生器。所述主架体200的两端均设置有若干导孔,所述主吸盘架210垂直设置在所述主架体200上,所述主吸盘211、接近开关220设置在所述主吸盘架210的底部。
所述连接架230通过导杆可活动的设置在所述主架体200上,所述导杆起到了支撑导向的作用,所述连接架230上设置有导孔。所述横向气缸240设置在所述主架体200上,所述横向气缸240的活塞杆端部与所述连接架230相连,所述连接架230可在所述横向气缸240的作用下左右移动。所述左挡架250通过导杆可活动的与所述主架体200相连,所述右挡架260通过导杆可活动的与所述连接架230相连,所述左、右挡架260的内侧底部均设置有侧吸盘262,所述上下气缸261设置在所述左、右挡架260上,所述上下气缸261的活塞杆的端部与所述主架体200或连接架230相连,所述左、右挡架260可在所述上下气缸261的作用下上下移动。所述压力传感器设置在所述主吸盘211、侧吸盘262内用来检测气压变化,所述主吸盘211、侧吸盘262与所述真空发生器相连。
进一步,所述接近开关220包括设置在所述主吸盘架210底部的带有圆柱形凹槽的底座221、可活动设置在所述凹槽内的探测杆222、设置在所述底座221与所述探测杆222之间的弹簧223、设置在所述探测杆222底部的探针224、设置在所述凹槽底部到检测块225。所述底座221、探测杆222均为绝缘材质,所述探针224、检测块225均为金属材质。所述弹簧223外表面涂有绝缘漆,所述弹簧223的弹力较小。所述探针224、检测块225分别与所述控制系统相连。初始状态下,探针224与检测块225分离,当探测杆222触碰到纸壳700后,弹簧223受力收缩,所述探针224与检测块225接触形成通路,这样控制系统便可探测到纸壳700。
所述料架300固定在工厂的地面上,所述定位结构包括第一、第二立柱301,所述第一、第二立柱301垂直设置在所述料架300相邻两个边上。工人将纸壳700放置在料架300上后,将纸壳700向第一、第二立柱301的方向推,使纸壳700相邻的两个边分别与所述第一、第二立柱301相互接触,完成纸壳700的初步定位。
所述倾斜定位台包括倾斜支架400、设置在所述倾斜支架400上的倾斜板401、设置在所述倾斜板401边缘的“7”字型挡板402,所述倾斜板401的倾斜角度为45°~60°,所述挡板402的折角设置在所述倾斜板401的最低点。
进一步,所述左、右定中模块均包括“T”字型定中支架610、设置在所述定中支架610上的定中气缸611、推板612,所述推板612通过导杆可活动的设置在所述定中支架610上,所述推板612与所述定中气缸611的活塞杆相连,所述推板612可在所述定中气缸611的作用下来回移动。
进一步,本发明还包括气压站,所述气压站包括高压气瓶、若干电磁阀,所述高压气瓶通过电磁阀分别与所述横向气缸240、上下气缸261、定中气缸611相连,为气缸提供动力。
本发明还包括控制系统,所述控制系统包括PLC控制器、液晶LCD、若干控制按钮。所述PLC控制器与所述液晶LCD、控制按钮、机器人100、压力传感器、真空发生器、电磁阀相连。在本发明布置完成后,使用者应通过控制按钮输入本发明的布置信息,即料架300、倾斜定位台、二次定位台500、输送线600的位置及尺寸,以便于控制系统控制机器人100搬运纸壳700。其中,所述PLC控制器的型号为:西门子PLC1200;所述液晶LCD的型号为:JLX19264G-933-P;所述压力传感器的型号为:EVT-2000;所述电磁阀的型号为:ZQDF-1。
一种风机外包装套箱系统的控制方法,包括以下步骤:
S1.参数设置,使用者向控制系统输入纸壳700尺寸;
S2.放置纸壳700,工人将一摞纸壳700放置在料架300上,并通过定位结构定位;
S3.抓取纸壳700,机器人100通过主吸盘211从料架300上抓取纸壳700;
S4.初次定位,机械人将纸壳700放置在倾斜定位台上并松开,纸壳700在重力作用下自动滑落至倾斜板401的最低点并被挡板402挡住;这时纸壳700的一个角位于挡板402的折角处,这个角的两边与挡板402的两边相互接触;
S5.精确抓取,机械人通过控制系统内储存的倾斜定位台尺寸信息、纸壳700尺寸信息计算得到纸壳700的精确位置,并通过主吸盘211再次抓取纸壳700;
S6.挡架张开,机械人将纸壳700移至二次定位台500上方,纸壳700在重力的作用下向下展开,横向气缸240伸出,右挡架260向外侧移动,当左、右挡架260之间的距离略大于定型后的纸壳700长度时,横向气缸240停止,同时上下气缸261伸出,使左、右挡架260对纸壳700呈环抱之势;
S7.二次定位,缓慢降落纸壳700,通过二次定位台500的阻挡作用将纸壳700定形为立方体,横向气缸240收缩,左、右挡架260上的侧吸盘262吸住纸壳700侧壁将纸壳700形状定住;
S8.风机箱体710定中,风机箱体710由输送线600输送到指定位置,然后左、右定中模块的推板612同时伸出相同距离,将风机箱体710定在指定位置后,推板612收回;
S9.套箱,机械人将纸壳700套在风机箱体710上,风机箱体710被输送到下一工序;
S10.重复S3~S9,同时在纸壳700不足时,进行S2。
进一步,所述抓取纸壳700的控制方法包括以下步骤:
S1.确定初始抓取位,真空发生器开启,机器人100从初始位置每间隔3毫米向下探料(即每下降3mm暂停一下),直到压力传感器检测到吸盘内的气压发生明显变化且接近开关220发出信号,便可确定初始抓取位并记录;
S2.抓取搬运,当压力传感器检测到压力降低到设定值且持续一段时间后,即可确定主吸盘211已经抓牢纸壳700,然后进行后续套箱动作;
S3.再次抓取,根据初始抓取位计算下探距离,进行S2,不断重复本步骤。
以上所述的本发明实施方式,并不构成对本发明保护范围的限定。任何在本发明的精神和原则之内所作的修改、等同替换和改进等,均应包含在本发明的权利要求保护范围之内。
- 一种风机外包装套箱系统及其控制方法
- 一种汽车手套箱锁控制系统及其控制方法