一种TOF相机的校准方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及一种校准方法,具体是涉及一种TOF相机的校准方法。
背景技术
基于TOF(Time-Of-Flight,飞行时间)理论的三维相机是当今技术的研究热点之一,TOF三维相机可以同时获取灰度图像和距离图像,已经逐渐出现在手势控制、3D建模、汽车雷达以及机器人视觉等系统领域中。
TOF相机技术是诸多光学三维测量技术中表现较为突出的一种,其基本原理是:主动光源发出的光由被摄物体反射后被TOF相机捕获,进一步根据光由发出到捕获的这段时间或者相位差来计算被摄物体与TOF相机的距离,且在获取被摄物体深度信息的同时,TOF相机还捕获灰度信息。但是由于其自身特性以及成像条件还有外界环境的干扰,TOF相机获取的数据通常存在一定的误差,因此需要对TOF相机进行标定并校正。然而,目前市面上的校准装置时延精准度无法保障。
发明内容
针对现有技术的缺陷,本发明提供一种TOF相机的校准方法,解决了现有的TOF模组由于自身特性以及成像条件和外界环境干扰等因素引起的数据存在一定误差的问题。
本发明的技术方案如下:
一种TOF相机的校准方法,所述方法包括:
调整标定板的物理距离,计算TOF相机的时延值;
通过调整所述TOF相机的时延值获得实际距离后,调整标定板的物理平面,以抵消延时调节;针对多个不同的物理平面与该平面对应的多个不同的时延值,根据各个像素点与待定目标之间的物理距离与实际距离,计算时延偏差;
利用时延偏差对所述TOF相机的时延值进行时延校准,得到最终的修正值,通过调节修正值修正时延偏差。
优选的,通过下式计算TOF相机的时延值:
(t
(t
...
(t
式中,t表示延时器总时延,d为物理距离,D为测量距离,调节d
调整标定板的物理距离D
优选的,获得所述各个像素点与待定目标之间的物理距离包括:通过调整TOF相机的时延值,获取各个像素点与待定目标之间的理论距离包括:根据TOF相机的测量范围确定延时器的总时延;
根据所述TOF相机的测量精度确定时延值的增量,以获得所述距离误差对应的多个时延值;
采用延时器对TOF相机的发出信号进行延时,通过延时后的调制信号驱动光源发射光束;
采集所述光束经由待定目标反射至TOF相机传感器的多个像素点,根据光束发出到TOF相机传感器捕获的时间间隔或者相位差,获取待定目标与TOF相机传感器的多个像素点的物理距离。
进一步地,所述采集光束通过待定目标反射至TOF相机传感器的多个像素点包括:所述标定板包括多个物理平面和虚拟平面,多个平面分别设置于TOF相机的各个光源和传感器之间,由所述TOF相机朝向待定目标延伸,所述待定目标与所述平面相对且间隔设置。
优选的,获取所述像素点与待定目标的实际距离包括:通过TOF相机获取所述待定目标的原始深度数据;根据所述原始深度数据,获取所述待定目标上的像素点与所述TOF相机的实际距离,以及所述待定目标上的像素点相对于所述TOF相机的方向;
根据所述待定目标上的像素点与所述TOF相机的实际距离,以及所述待定目标上的像素点相对于所述TOF相机的方向,得到所述待定目标上的像素点与所述TOF相机的实际距离。
优选的,所述获取多个不同的物理平面与该平面对应的多个不同的时延值包括:
通过调整延时器模拟与标定板的距离,来进行数据采集和分析;
设TOF相机的传感器芯片到标定板的距离为X1;
记录调整延时器的次数为n,通过调整延时器的延时值计算当前虚拟平面的距离值:
所述虚拟平面距离与延时器的调整值呈正比例关系;所述多个不同的延时值以相同的增量依次递增移动物理平面的值,使得传感器到物理平面的距离增大;
设增加后的距离为X2,当移动到某一个位置后使得X2=D′;
当物理平面数量有多个时,记录当前物理平面数目m,通过多个物理平面和多个虚拟平面计算精准的延时Δt的值。
进一步地,通过下式确定当前虚拟平面的距离值:
D′=X1+n*Δt*C/2;
式中,C为光速。
优选的,所述通过调节修正值修正距离偏差包括:
确定虚拟平面距离与延时器的调整值的比例关系;
采用插值计算,根据所述比例关系逐步调节传感器到物理平面的距离值,对各个像素进行距离补偿,使得修正值偏差减小,直至原始TOF相机的时延值与距离误差校准表的差值为零。
本发明的有益效果体现在:
本发明针对目前市面上的校准装置时延精准度无法保障的难题,提供一种TOF相机的校准方法,对TOF相机进行标定和校正。首先,调整标定板的物理距离,计算TOF相机的时延值;通过调整所述TOF相机的时延值获得实际距离后,调整标定板的物理平面,以抵消延时调节;其次,针对多个不同的物理平面与该平面对应的多个不同的时延值,根据各个像素点与待定目标之间的物理距离与实际距离,计算时延偏差;利用时延偏差对所述TOF相机的时延值进行时延校准,得到最终的修正值,通过调节修正值修正时延偏差。通过两个以及以上的物理平面,将时延作为畸变参数的一部分,从而保障时延的精准度。最后通过调节修正值修正距离偏差。相比传统的延时器获得的时间值,通过上述方案计算的值更为精准,从而提高校准后的距离值的准确度。解决了现有的TOF模组由于自身特性以及成像条件和外界环境干扰等因素引起的数据存在一定误差的问题。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
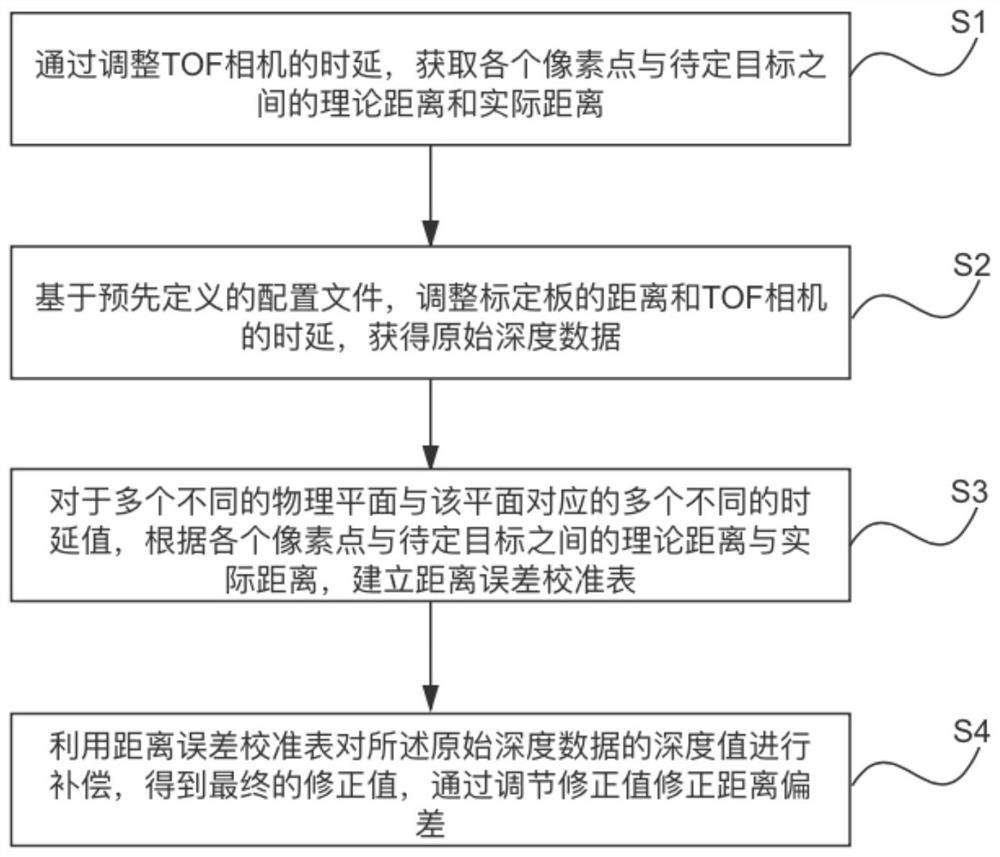
图1示出了本发明具体实施方式中提供的一种TOF相机的校准方法流程图;
图2示出了本发明具体实施方式中提供的移动物理平面的结构示意图。
具体实施方式
下面结合具体实施方式对本发明的一种TOF相机的校准方法及系统做进一步说明:
本发明针对现有技术中TOF相机标定精确度不高,校准装置体积过大、操作复杂、校准效率低等缺点,提出了一种校准方案。其主要包括:
步骤1,调整TOF相机的时延来获取各个像素点与待定目标之间的理论距离和实际距离;
步骤2,多次调整标定板的距离后,再调整TOF相机的时延获取相关数据。
步骤3,对于多个不同的物理平面和该平面对应的多个不同的时延值,根据各个像素点和待定目标之间的理论距离与实际距离建立距离误差校准表。
步骤4,利用距离误差校准表对深度值进行补偿,得到最终的修正值。
上述校准方案具体执行过程可结合实施例一提供的TOF相机的校准方法。上述方案的提出有效实现了TOF相机在短时间内快速校准出高精度的校准效果。
参见附图1所示,本发明实施例一提出一种TOF相机的校准方法,所述方法包括:
S1,调整标定板的物理距离,计算TOF相机的时延值;
S2,通过调整所述TOF相机的时延值获得实际距离后,调整标定板的物理平面,以抵消延时调节;
S3,针对多个不同的物理平面与该平面对应的多个不同的时延值,根据各个像素点与待定目标之间的物理距离与实际距离,计算时延偏差;
S4,利用时延偏差对所述TOF相机的时延值进行时延校准,得到最终的修正值,通过调节修正值修正时延偏差。
步骤S1中,通过下式计算TOF相机的时延值:
(t
(t
...
(t
式中,t表示延时器总时延,d为物理距离,D为测量距离,调节d
调整标定板的物理距离D
步骤S3中,获得所述各个像素点与待定目标之间的物理距离包括:通过调整TOF相机的时延值,获取各个像素点与待定目标之间的理论距离包括:根据TOF相机的测量范围确定延时器的总时延;
根据所述TOF相机的测量精度确定时延值的增量,以获得所述距离误差对应的多个时延值;
采用延时器对TOF相机的发出信号进行延时,通过延时后的调制信号驱动光源发射光束;
采集所述光束经由待定目标反射至TOF相机传感器的多个像素点,根据光束发出到TOF相机传感器捕获的时间间隔或者相位差,获取待定目标与TOF相机传感器的多个像素点的物理距离。
所述采集光束通过待定目标反射至TOF相机传感器的多个像素点包括:所述标定板包括多个物理平面和虚拟平面,多个平面分别设置于TOF相机的各个光源和传感器之间,由所述TOF相机朝向待定目标延伸,所述待定目标与所述平面相对且间隔设置。
步骤S3中,获取所述像素点与待定目标的实际距离包括:通过TOF相机获取所述待定目标的原始深度数据;根据所述原始深度数据,获取所述待定目标上的像素点与所述TOF相机的实际距离,以及所述待定目标上的像素点相对于所述TOF相机的方向;
根据所述待定目标上的像素点与所述TOF相机的实际距离,以及所述待定目标上的像素点相对于所述TOF相机的方向,得到所述待定目标上的像素点与所述TOF相机的实际距离。
进一步地,步骤S3中,获取多个不同的物理平面与该平面对应的多个不同的时延值包括:
通过调整延时器模拟与标定板的距离,来进行数据采集和分析;
设TOF相机的传感器芯片到标定板的距离为X1;
记录调整延时器的次数为n,通过调整延时器的延时值计算当前虚拟平面的距离值:
所述虚拟平面距离与延时器的调整值呈正比例关系;所述多个不同的延时值以相同的增量依次递增移动物理平面的值,使得传感器到物理平面的距离增大;
设增加后的距离为X2,当移动到某一个位置后使得X2=D′;
当物理平面数量有多个时,记录当前物理平面数目m,通过多个物理平面和多个虚拟平面计算精准的延时Δt的值。
通过下式确定当前虚拟平面的距离值:
D′=X1+n*Δt*C/2;
式中,C为光速。
由图1可知本校准方法是通过调整延时器来模拟与标定板的距离来进行数据采集和分析的。设传感器芯片到标定板的距离为X1,当调整延时器的值后,虚拟平面的距离会大于X1的值,记录调整延时器的次数为n,可以计算出此时虚拟平面的距离值D′=X1+n*Δt*C/2;
由图2可知,此时移动物理平面的值,使得传感器到物理平面的距离增大,设增加后的距离为X2,当移动到某一个位置后可使X2=D′,此时可以求得Δt的精确值。当物理平面有多个的时候,记录物理平面数为m,此时通过多个物理平面和多个虚拟平面来计算精准的Δt的值。相比传统的延时器的时间值,这种方式求出来的值更为精准,使得校准后的距离值更为准确。
步骤S4中,通过调节修正值修正距离偏差包括:
确定虚拟平面距离与延时器的调整值的比例关系;
采用插值计算,根据所述比例关系逐步调节传感器到物理平面的距离值,对各个像素进行距离补偿,使得修正值偏差减小,直至原始TOF相机的时延值与距离误差校准表的差值为零。
实施例2:基于实施例1相同的技术构思,本发明具体实施方式还提供一种TOF相机的校准系统,作为基于一种TOF相机的校准方法相对应的虚拟系统,该系统相比传统校准装置,不但可实现校准无人值守,且无机械轨道、体积小。
所述系统包括:
第一计算模块,用于调整标定板的物理距离,计算TOF相机的时延值;
调整模块,用于调整所述TOF相机的时延值获得实际距离后,调整标定板的物理平面,以抵消延时调节;
第二计算模块,用于针对多个不同的物理平面与该平面对应的多个不同的时延值,根据各个像素点与待定目标之间的物理距离与实际距离,计算时延偏差;
校准模块,用于利用时延偏差对所述TOF相机的时延值进行时延校准,得到最终的修正值,通过调节修正值修正时延偏差。
最后应当说明的是:以上实施例仅用以说明本申请的技术方案而非对其保护范围的限制,尽管参照上述实施例对本申请进行了详细的说明,所属领域的普通技术人员应当理解:本领域技术人员阅读本申请后依然可对申请的具体实施方式进行种种变更、修改或者等同替换,这些变更、修改或者等同替换,其均在其申请待批的权利要求范围之内。
- 一种TOF相机系统的深度图像校准方法及系统
- 一种TOF相机的校准方法