甘蔗叶捡拾打捆机及打捆作业方法
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及农业机械领域,特别是涉及一种甘蔗叶捡拾打捆机及打捆作业方法。
背景技术
甘蔗属于多年生植物,种植一次可连续收割三年到四年。中国的甘蔗多种植于南方沿海或西南地区各省市,这些地区多为山地丘陵性地貌或者盆地地貌,盆地大小相杂,山系多呈弧形,大面积的平地地貌较少。受南方甘蔗地垄高的影响,甘蔗地面起伏不平,给甘蔗叶的捡拾带来极大的不便。即使存在部分种植于平地的甘蔗,由于实际种植培土的不规范,蔗地中也会有很多不规则的凸起、凹陷、蔗蔸或杂草等情况。在具有地垄设置的甘蔗地中,甘蔗在收割完成后,地面会留下大量的甘蔗叶和杂草,需要将其捡拾打捆处理。
传统甘蔗捡拾打捆机,只适用于北方平地面的捡拾,对于南方起伏不平的甘蔗地,现有的装备无法实现有效的捡拾打捆,受到高低不平的地势影响,甚至是无法正常工作。另外,由于甘蔗叶实际的分布均匀性不一致,打捆后的甘蔗叶通常体积大小不一,不方便大批量运输,内部含水量又往往无法达标,在后期运输过程中会发生捆包腐烂的问题,传统甘蔗捡拾打捆机通过人工调节紧缩压力,操作效率低,也容易发生安全事故。
因此就中国南方目前的种植状况以及地形地貌,开发一种能在南方特有的地理特性下全自动运行的甘蔗叶捡拾打捆机,实现南方甘蔗地的甘蔗叶捡拾打捆的机械自动化已经迫在眉睫。
发明内容
基于此,有必要针对上述提到的至少一个问题,提供一种甘蔗叶捡拾打捆机及打捆作业方法。
第一个方面,本申请提供了一种甘蔗叶捡拾打捆机,包括运动承载装置以及设置在所述运动承载装置上的搂草捡拾装置、打捆装置、紧包装置和控制装置;所述控制装置分别与所述搂草捡拾装置和所述紧包装置电连接;
所述搂草捡拾装置与所述打捆装置的进料口间隔预设间距,所述搂草捡拾装置用于将所述运动承载装置行进方向两侧预定范围内的甘蔗叶聚集到所述打捆装置的进料口处;
所述紧包装置与所述打捆装置的出料口连接,所述紧包装置用于在所述控制装置的控制下,以预设压紧力对所述打捆装置中输出的捆包进行紧缩。
在第一个方面的某些实现方式中,所述紧包装置包括拉紧油缸、紧缩框、拉紧梁和拉紧索;所述拉紧油缸与所述控制装置电连接;
所述紧缩框为门字形框架,所述拉紧梁设置在所述紧缩框的框架开口处,所述拉紧索一端与所述拉紧油缸连接,另一端与所述拉紧梁连接;所述拉紧油缸设置在所述紧缩框上。
结合第一个方面和上述实现方式,在第一个方面的某些实现方式中,所述紧包装置还包括两根拉簧和三个滑轮;所述拉紧梁两端分别设置有一个所述滑轮,所述紧缩框上设置有一个所述滑轮;所述拉紧梁长度方向两侧的所述紧缩框上均设置有所述拉簧;所述拉紧索经过所述滑轮,并通过所述拉簧连接在所述拉紧油缸和所述紧缩框上。
结合第一个方面和上述实现方式,在第一个方面的某些实现方式中,所述搂草捡拾装置包括搂草盘、搂草盘提升臂和提升油缸;所述搂草盘提升臂的一端连接所述搂草盘,另一端连接所述提升油缸,所述搂草盘提升臂用于在所述提升油缸的带动下,使得所述搂草盘在第一位置和第二位置之间切换。
结合第一个方面和上述实现方式,在第一个方面的某些实现方式中,所述控制装置包括处理器,以及与所述处理器通信连接的液压驱动器、压力传感器和显示器;
所述压力传感器设置在所述紧包装置上,用于检测所述紧包装置上的压紧力;
所述液压驱动器分别与所述搂草捡拾装置和所述紧包装置上的液压机构连接。
结合第一个方面和上述实现方式,在第一个方面的某些实现方式中,所述控制装置还包括方向感应器;所述方向感应器与所述处理器通信连接,所述方向感应器设置在所述运动承载装置上;所述方向感应器用于检测所述运动承载装置的行进方向。
第二个方面,本发明申请还提供了一种甘蔗叶捡拾打捆作业方法,采用如本发明申请第一个方面中任一项描述的甘蔗叶捡拾打捆机执行,执行的步骤包括:
通过所述搂草捡拾装置将所述运动承载装置行进方向两侧预定范围内的甘蔗叶向所述打捆装置的进料口处聚集;
通过所述打捆装置将所述进料口处的所述甘蔗叶输入到所述打捆装置内,将所述甘蔗叶从所述打捆装置的出料口以预设形状输出成捆包;
将所述捆包压入所述紧包装置,保持所述紧包装置的压紧力在预设压紧力范围内,对所述捆包进行紧缩并输出。
在第二个方面的某些实现方式中,所述通过所述搂草捡拾装置将所述运动承载装置行进方向两侧预定范围内的甘蔗叶向所述打捆装置的进料口处聚集的步骤,还包括:
获取到所述运动承载装置的转弯开始信号;
根据所述转弯开始信号,通过所述控制装置提升所述搂草捡拾装置至第一预设高度,使得所述搂草捡拾装置停止聚集所述甘蔗叶;
获取到所述运动承载装置的转弯停止信号;
根据所述转弯停止信号,通过所述控制装置降低所述搂草捡拾装置至第二预设高度,使得所述搂草捡拾装置继续聚集所述甘蔗叶。
结合第二个方面和上述实现方式,在第二个方面的某些实现方式中,所述保持所述紧包装置的压紧力在预设压紧力范围内的步骤,包括:
获取所述紧包装置的压紧力,若所述压紧力小于所述预设压紧力范围的最小值,则以第一声音信号发出预警,并通过所述控制装置提升所述紧包装置的压紧力;若所述压紧力大于所述预设压紧力范围的最大值,则以第二声音信号发出预警,并通过所述控制装置降低所述紧包装置的压紧力。
本发明的实施例中提供的技术方案带来如下有益技术效果:
本发明提供的甘蔗叶捡拾打捆机及打捆作业方法,根据甘蔗叶捡拾打捆作业的具体作业状态,通过控制装置对搂草捡拾装置和紧包装置进行合理控制,自动调整搂草捡拾装置的运行,以及紧包装置的压紧力,能够自动化地将垄沟中的甘蔗叶捡拾到打捆装置内,并通过紧包装置确保打捆装置输出的捆包具有相同的紧实度,实现南方甘蔗地的甘蔗叶捡拾打捆的机械自动化。
本申请附加的方面和优点将在后续部分中给出,并将从后续的描述中详细得到理解,或通过对本发明的具体实施了解到。
附图说明
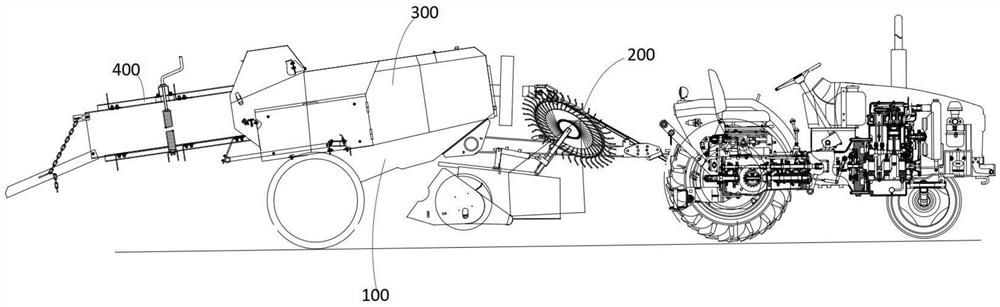
图1为本发明申请一实施例中甘蔗叶捡拾打捆机的第一视角平面结构示意图;
图2为本发明申请一实施例中甘蔗叶捡拾打捆机的第二视角平面结构示意图;
图3为本发明申请一实施例中紧包装置的立体结构示意图;
图4为本发明申请一实施例中搂草捡拾装置的结构示意图;
图5为本发明申请一实施例中甘蔗叶捡拾打捆作业方法的方法流程示意图;
图6为本发明申请另一实施例中甘蔗叶捡拾打捆作业方法的方法流程示意图。
附图标记说明:
100-运动承载装置,200-搂草捡拾装置,300-打捆装置,400-紧包装置;
210-搂草盘,220-搂草盘提升臂,230-提升油缸;
410-拉紧油缸,420-紧缩框,430-拉紧梁,440-拉紧索,450-滑轮,460-拉簧;
421-上横梁板,422-侧板。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的可能的实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文已经通过附图描述的实施例。通过参考附图描述的实施例是示例性的,用于使对本发明的公开内容的理解更加透彻全面,而不能解释为对本发明的限制。此外,如果已知技术的详细描述对于示出的本发明的特征是非必要技术的,则可能将这些技术细节予以省略。
相关领域的技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语),具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语,应该被理解为具有与现有技术中的意义一致的意义,并且除非像这里一样被特定定义,否则不会用理想化或过于正式的含义来解释。
本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本申请的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,这里使用的措辞“和/或”包括一个或更多个相关联的列出项的全部或任一单元和全部组合。
下面以具体地实施例对本发明的技术方案以及该技术方案如何解决上述的技术问题进行详细说明。
本发明申请第一个方面的实施例提供了一种甘蔗叶捡拾打捆机,如图1和图2所示,包括运动承载装置100以及设置在运动承载装置100上的搂草捡拾装置200、打捆装置300、紧包装置400和控制装置(图中未示出);控制装置分别与搂草捡拾装置200和紧包装置400电连接。搂草捡拾装置200与打捆装置300的进料口间隔预设间距,搂草捡拾装置200用于将运动承载装置100行进方向两侧预定范围内的甘蔗叶聚集到打捆装置300的进料口处。紧包装置400与打捆装置300的出料口连接,紧包装置400用于在控制装置的控制下,以预设压紧力对打捆装置300中输出的捆包进行紧缩。
打捆机实际上是一种早在十九世纪就被发明出来的农业机械,通过打捆机可以将散落在田间地头的青草、秸秆等农作物残留整理成规则形状的捆包,例如圆柱形、圆球形或者立方体形的捆包,以实现对农作物残枝败叶的方便收集和运输。本发明申请中所应用的打捆装置300可直接采用现有技术中的成熟打捆机,该打捆机的具体结构,以及使用方法,并非本发明申请的改进重点,不做更多赘述。
为了适应南方地区甘蔗种植园的特殊地形,即采用垄沟间隔的甘蔗地,本发明申请在打捆装置300的进料口附近设置有搂草捡拾装置200,通过该装置将垄沟内的甘蔗叶收拢到隆起的地垄上,以便于打捆装置300高效率地接收并进行打捆作业。当然,本发明申请所采用的运动承载装置100通常可采用带有轮子或者履带的车辆底盘,而甘蔗叶捡拾打捆机也可依靠拖拉机或者其他车辆提供移动动力以及液压动力。
从打捆机中打捆后输出的捆包可能存在紧实度大小不一的情况,由于甘蔗叶本身存在一定的韧性,在从打捆装置300中输出后,可能会因为紧实度不够,内部含水量较高,体积也发生膨胀,直接得到的捆包可能大小不一,内部饱含大量水分。通过设置紧包装置400,打捆装置300在输出捆包时,具有一定的推力,依靠该推力,将捆包压入到紧包装置400内。紧包装置400内能够将捆包在一定的压紧力范围进行紧缩,从而确保捆包在最终输出时保持定型,并尽可能降低内部含水量。
为了实现甘蔗叶捡拾打捆机的自动化运行,减少人工参与的程度,本申请提供的甘蔗叶捡拾打捆机中设置有控制装置,通过具有逻辑计算能力和信号处理能力的控制装置,对打捆装置300、搂草捡拾装置200和紧包装置400进行相应地自动化控制,根据具体的作业状态,指挥对应的装置执行规定的动作,更好地完成甘蔗叶捡拾打捆作业。例如,控制搂草捡拾装置200在需要捡拾甘蔗叶时进行正常捡拾作业,而当拖拽甘蔗叶捡拾打捆机的拖拉机转向时,停止搂草捡拾装置200作业并改变其在甘蔗叶捡拾打捆机上的姿态,防止其与田垄或地垄碰触。再例如,控制装置中预设有紧包装置400的压紧力范围,一方面对紧包装置400中的实际压紧力进行检测,一旦出现压紧力不在预设压紧力范围的情况,则执行相应的动作。
本发明提供的甘蔗叶捡拾打捆机及打捆作业方法,根据甘蔗叶捡拾打捆作业的具体作业状态,通过控制装置对搂草捡拾装置200和紧包装置400进行合理控制,自动调整搂草捡拾装置200的运行,以及紧包装置400的压紧力,能够自动化地将垄沟中的甘蔗叶捡拾到打捆装置300内,并通过紧包装置400确保打捆装置300输出的捆包具有相同的紧实度,实现南方甘蔗地的甘蔗叶捡拾打捆的机械自动化。
可选的,在本发明申请第一个方面实施例的某些实现方式中,如图3所示,紧包装置400包括拉紧油缸410、紧缩框420、拉紧梁430和拉紧索440;拉紧油缸410与控制装置电连接。紧缩框420为门字形框架,拉紧梁430设置在紧缩框420的框架开口处,拉紧索440一端与拉紧油缸410连接,另一端与拉紧梁430连接;拉紧油缸410设置在紧缩框420上。
在本实现方式中,紧包装置400的横截面形状可视作为矩形,并且该矩形的一条边可沿长度方向移动,该矩形上的该条边对应紧缩框420上的拉紧梁430。根据实际需要,紧缩框420以及拉紧梁430的工作面行程可具体选定,也即捆包在紧包装置400的紧缩框420中移动的距离可根据实际确定。在拉紧油缸410以及拉紧索440的连接下,拉紧梁430在紧缩框420上的压紧力可控制在一定范围内。拉紧油缸410的液压油通过液压油管输入或输出,液压油的油量以及输入输出时机由控制装置控制。通常进入到紧包装置400内的捆包较紧缩框420大,经强力推入到紧缩框420内时,会相应收缩,通过拉紧油缸410、拉紧索440调整拉紧梁430的压紧力,确保经过紧包装置400的捆包符合预设的压紧作业要求。
可选的,结合本申请实施例的上述实现方式,在第一个方面实施例的某些实现方式中,如图3所示,紧包装置400还包括两根拉簧460和三个滑轮450;拉紧梁430两端分别设置有一个滑轮450,紧缩框420上设置有一个滑轮450;拉紧梁430长度方向两侧的紧缩框420上均设置有拉簧460;拉紧索440经过滑轮450,并通过拉簧460连接在拉紧油缸410和紧缩框420上。紧缩框420具体可由两个侧板422和一个上横梁板421组成,侧板422分别与上横梁板421垂直并设置在上横梁板421的两端,而拉紧梁430与上横梁板421平行,设置在侧板422的另一端。拉紧油缸410设置在上横梁板421上,一个滑轮450设置在拉紧油缸410附近,用于改变拉紧索440的走向。在拉紧梁430的两端分别设置一个滑轮450,当然,该滑轮450可采用隐藏式设置,例如在拉紧梁430上设置一沟槽,将滑轮450设置在沟槽内。拉紧油缸410上连接有一段拉紧索440,该段拉紧索440经过设置在上横梁板421的滑轮450,改变方向之后与设置在侧板422旁边的拉簧460连接。另外一段拉索与该拉簧460连接之后再经过拉紧梁430上的两个滑轮450,卷绕上来之后再与另一个侧板422附近的拉簧460的一端连接,该拉簧460的另一端则与上横梁板421连接。
通过拉紧油缸410的伸缩,带动拉索伸长或缩短,从而将拉紧梁430以一定的压紧力限制在两个侧板422的一端。为避免拉紧梁430在拉簧460的伸缩方向的垂直方向上移动,可相应在侧板422和拉紧梁430上设置限制部件,例如可在侧板422的顶端设置凸块,该凸块与沟槽的尺寸形状相匹配,使得拉紧梁430只能在拉簧460的伸缩方向上移动,而不能在伸缩方向的垂直方向上移动。通过拉簧460的设置,能够使得拉紧梁430的移动更具有韧性,既方便捆包在紧包装置400中移动,又能够确保捆包得到预定压紧力的紧缩。
可选的,在本发明申请第一个方面实施例的某些实现方式中,如图4所示,搂草捡拾装置200包括搂草盘210、搂草盘提升臂220和提升油缸230;搂草盘提升臂220的一端连接搂草盘210,另一端连接提升油缸230,搂草盘提升臂220用于在提升油缸230的带动下,使得搂草盘210在第一位置和第二位置之间切换。实际上,每个甘蔗叶捡拾打捆机上都会设置沿运动承载装置100的中心轴线对称的两组搂草捡拾装置200。搂草盘210上均匀设置有拾草钢丝,并且上面也设置有动力机构,用于驱动搂草盘210旋转。搂草盘210在工作时会呈现为与地面成一定的角度。由于搂草盘210的具体结构以及基本运行方式不是本发明申请的重点,故不作更多叙述,可直接选用现有技术中的搂草盘210。
本申请上述实施例中的搂草盘210设置在搂草盘提升臂220上,该搂草盘提升臂220可使得搂草盘210保持在第一位置或第二位置处,其中第一位置可以是作业位置,也即靠近地面,第二位置是收纳位置,即远离地面。搂草盘提升臂220与提升油缸230连接,通过液压动力,实现搂草盘提升臂220的运动。搂草盘提升臂220实际上是一种依靠液压运动的机械臂,具体的结构可根据甘蔗叶捡拾打捆机的具体外形进行相应设置,基本的运行原理可直接借鉴现有技术中的液压机械臂技术。
通过本申请提供的搂草捡拾装置200,当一行甘蔗叶捡拾完毕,需要转弯掉头时,通过控制装置控制油缸驱动装置,驱动提升油缸230的动作,将搂草捡拾机构抬起,也即切换到第二位置处,使其脱离地面,远离地垄,防止搂草捡拾结构被田间地垄损坏。转弯完毕,进入第二行的甘蔗叶捡拾作业时,驱动提升油缸230放下,搂草轮捡拾装置继续将地沟中的甘蔗叶和杂草捡拾到地垄上,甘蔗叶再经过打捆装置300,打捆并压缩成草料包。
可选的,在本发明申请第一个方面实施例的某些实现方式中,控制装置包括处理器,以及与处理器通信连接的液压驱动器、压力传感器和显示器。压力传感器设置在紧包装置400上,用于检测紧包装置400上的压紧力。液压驱动器分别与搂草捡拾装置200和紧包装置400上的液压机构连接。
处理器可以是CPU(Central Processing Unit,中央处理器),通用处理器,DSP(Digital Signal Processor,数据信号处理器),ASIC(Application SpecificIntegrated Circuit,专用集成电路),FPGA(Field-Programmable Gate Array,现场可编程门阵列)或者其他可编程逻辑器件、晶体管逻辑器件、硬件部件或者其任意组合。其可以实现或执行结合本发明公开内容所描述的各种示例性的逻辑方框,模块和电路。处理器也可以是实现计算功能的组合,例如包含一个或多个微处理器组合,DSP和微处理器的组合等。
液压驱动器是液压系统中的关键控制部件,可直接采用现有技术中符合本申请应用条件的成品液压驱动器。处理器通过对液压驱动器的控制,实现对本申请提供的甘蔗叶捡拾打捆机上的液压系统的控制。压力传感器设置在紧包装置400上,例如可设置在拉簧460上,或者拉索上,用于检测紧包装置400上的实际压紧力,并且将检测到的数据传输到处理器中,供处理器检测处理。显示器上可以用来显示甘蔗叶捡拾打捆机工作过程中的各种信息,例如车辆行进速度,搂草盘210的作业角度和作业速率,紧包装置400的压紧力大小,预设压紧力范围等等。显示器上可预设人机交互界面,该人机交互界面可用于操作者向甘蔗叶捡拾打捆机输入指令或者查询信息。
可选的,在本发明申请第一个方面实施例的某些实现方式中,控制装置还包括方向感应器;方向感应器与处理器通信连接,方向感应器设置在运动承载装置100上;方向感应器用于检测运动承载装置100的行进方向。方向感应器用于监测运动承载装置100的行驶方向,例如可监控拖拽甘蔗叶捡拾打捆机的拖拉机的行进方向,一旦检测到拖拉机转弯是信号,则将该信号传输给控制装置,由控制装置根据转弯幅度大小决定是否将搂草捡拾装置200抬起。
基于同一技术构思,本发明申请第二个方面的实施例还提供了一种甘蔗叶捡拾打捆作业方法,采用如本发明申请第一个方面中任一项描述的甘蔗叶捡拾打捆机执行,如图5所示,执行的步骤包括:
S10:通过搂草捡拾装置200将运动承载装置100行进方向两侧预定范围内的甘蔗叶向打捆装置300的进料口处聚集。
S20:通过打捆装置300将进料口处的甘蔗叶输入到打捆装置300内,将甘蔗叶从打捆装置300的出料口以预设形状输出成捆包。
S30:将捆包压入紧包装置400,保持紧包装置400的压紧力在预设压紧力范围内,对捆包进行紧缩并输出。
由于搂草捡拾装置200设置在运动承载装置100的行进方向的两侧,能够适应南方甘蔗种植园中垄沟结构的种植方式,甘蔗叶捡拾打捆机在拖拉机的拖拽下行进在垄上,搂草捡拾装置200将垄两侧的沟渠中的甘蔗叶或杂草收集聚拢到垄上,并由打捆装置300的相关机构将甘蔗叶或杂草收入。之后,由打捆装置300将收入的甘蔗叶或杂草打捆成包,形成初步的甘蔗叶捆包。然后,打捆装置300利用自身的输出推力将初步形成的甘蔗叶捆包压入到紧包装置400内,使其在预设压紧力范围内进行紧缩,最后输出,并放置在甘蔗种植地中,由运输机械转运移走。
本发明提供的打捆作业方法,根据甘蔗叶捡拾打捆作业的具体作业状态,通过控制装置对搂草捡拾装置200和紧包装置400进行合理控制,自动调整搂草捡拾装置200的运行,以及紧包装置400的压紧力,能够自动化地将垄沟中的甘蔗叶捡拾到打捆装置300内,并通过紧包装置400确保打捆装置300输出的捆包具有相同的紧实度,实现南方甘蔗地的甘蔗叶捡拾打捆的机械自动化。
可选的,在第二个方面实施例的某些实现方式中,S10中通过搂草捡拾装置200将运动承载装置100行进方向两侧预定范围内的甘蔗叶向打捆装置300的进料口处聚集的步骤,如图6所示,还具体包括:
S11:获取到运动承载装置100的转弯开始信号;根据转弯开始信号,通过控制装置提升搂草捡拾装置200至第一预设高度,使得搂草捡拾装置200停止聚集甘蔗叶。
S12:获取到运动承载装置100的转弯停止信号;根据转弯停止信号,通过控制装置降低搂草捡拾装置200至第二预设高度,使得搂草捡拾装置200继续聚集甘蔗叶。
也即,当甘蔗叶捡拾打捆机需要转弯时,将通过有关传感器获取到的转弯开始信号传输到控制装置中,控制装置根据转弯开始信号进行处理和判断,确定甘蔗叶捡拾打捆机即将进行转弯,则输出指令到搂草捡拾装置200,抬起搂草盘210,避免搂草盘210与地垄发生碰撞。当控制装置再次接到转弯停止型号,则放下搂草盘210,继续捡拾甘蔗叶的作业。
在实际的甘蔗叶捡拾作业中,还可以将第二预设高度设置为多档,例如可设置为两档,使得搂草盘能够根据地势的高低,适应性进行操作。还可以将第二预设高度设置为随地仿形,采用相关的传感器检测地面高度,例如在搂草捡拾装置200的前端(以甘蔗叶捡拾打捆机前进方向为参照)设置测距传感器,根据测距传感器检测到的地势高度,调整第二预设高度,从而适应性地将第二预设高度设置为动态可调整的参数,更便于捡拾高低不平的甘蔗地中的甘蔗叶。
可选的,结合本发明申请第二个方面的实施例和上述实现方式,在第二个方面实施例的某些实现方式中,S30中保持紧包装置400的压紧力在预设压紧力范围内的步骤,包括:获取紧包装置400的压紧力,若压紧力小于预设压紧力范围的最小值,则以第一声音信号发出预警,并通过控制装置提升紧包装置400的压紧力;若压紧力大于预设压紧力范围的最大值,则以第二声音信号发出预警,并通过控制装置降低紧包装置400的压紧力。通过有关传感器,例如前述的压力传感器,时刻获取紧包装置400中的压紧力大小,由控制装置收集并进行相应处理,与预设压紧力范围对比,控制紧包装置400中拉紧油缸410的拉力,确保紧包装置400的实际压紧力保持在预设压紧力范围内。
具体地,控制装置可设计为一电液控制箱,该电液控制箱上设置有带液晶显示屏的遥控器。电液控制箱开机后,就能够显示紧包装置400的压紧力,同时也能够显示实际压紧力所在的档位区间,即是处于正常、过低或过高等档位,更直观地指导现场作业,以及进行更方便的操作。
本技术领域技术人员可以理解,本申请中已经讨论过的各种操作、方法、流程中的步骤、措施、方案可以被交替、更改、组合或删除。进一步地,具有本申请中已经讨论过的各种操作、方法、流程中的其他步骤、措施、方案也可以被交替、更改、重排、分解、组合或删除。进一步地,现有技术中的具有与本申请中公开的各种操作、方法、流程中的步骤、措施、方案也可以被交替、更改、重排、分解、组合或删除。
术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本申请的描述中,除非另有说明,“多个”的含义是两个或两个以上。
在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本申请中的具体含义。
在本说明书的描述中,具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
应该理解的是,虽然附图的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,其可以以其他的顺序执行。而且,附图的流程图中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,其执行顺序也不必然是依次进行,而是可以与其他步骤或者其他步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
以上所述仅是本申请的部分实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本申请原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本申请的保护范围。
- 甘蔗叶捡拾打捆机及打捆作业方法
- 一种防堵型甘蔗叶打捆机捡拾机构