一种空间站舱内载荷支撑框架在轨操作省力装置
文献发布时间:2023-06-19 10:21:15
技术领域
本发明属于载人航天工程空间站系统领域,具体地说是一种空间站舱内载荷支撑框架在轨操作省力装置。
背景技术
空间站主要由核心舱、两个实验舱和货运飞船等密封舱段组成,在长期在轨运营阶段,多名宇航员在空间站内长期驻留,并将在各舱段内开展大规模多学科领域的大量的空间科学研究和应用技术验证试验。其中,载荷支撑框架为各科学仪器与辅助设备提供固定支撑及标准载荷接口。因而,载荷支撑框架是空间站舱内非常重要的支撑设施。
载荷支撑框架通过其自身顶部和底部的标准接口与空间站舱段连接固定,从而为各实验载荷提供稳定的支撑。由于空间站的设计使用寿命超过10年,并且通过货运飞船往返空间站和地面之间的成本费用很高,因此,应具备一定的在轨维修性,以保证宇航员在空间站舱内长期稳定地开展科学研究。这就要求载荷支撑框架具备在轨翻转功能,以方便在轨维护和操作。
空间站运行在近地轨道,宇航员长期处于微重力受微重力下操作力限制,在拆装载荷支撑框架的过程中,宇航员的操作力有限;同时,受到密封舱段内操作空间限制,无法使用地面上的长杆扳手。为解决采用常规力矩扳手难以实现舱内载荷支撑框架的在轨拆装的难题,需要研制新型的适用于微重力环境下的在轨操作省力装置。
发明内容
针对上述问题,本发明的目的在于提供一种空间站舱内载荷支撑框架在轨操作省力装置,以解决微重力环境下空间站内宇航员在轨操作力不足的问题。
本发明的目的是通过以下技术方案来实现的:
一种空间站舱内载荷支撑框架在轨操作省力装置,包括舱内载荷支撑框架、固定转接件、省力机构、不脱出螺钉及角件,其中舱内载荷支撑框架的底部及顶部均设有角件,各角件通过不脱出螺钉与空间站舱段标准接口连接;所述省力机构设置于固定转接件上,所述固定转接件与所述舱内载荷支撑框架连接,使所述省力机构与所述角件上的不脱出螺钉相对应,所述省力机构通过扭矩倍增拧紧或松开不脱出螺钉,从而实现舱内载荷支撑框架的安装或装拆。
所述省力机构包括固定座、壳体、蜗轮轴、蜗杆轴及蜗轮,其中固定座与所述固定转接件连接;所述壳体设置于固定座上,所述蜗轮轴和蜗杆轴相互垂直地设置于所述壳体内,所述蜗轮套装在所述蜗轮轴上,并且与所述蜗杆轴啮合,所述蜗轮轴的一端或两端为扭矩输出端。
所述蜗轮轴的两端分别设有位于所述壳体外侧的左扳手头和右扳手头,所述左扳手头和右扳手头用于与所述不脱出螺钉对接。
所述的空间站舱内载荷支撑框架在轨操作省力装置,还包括长杆扳手,所述长杆扳手的一端与所述不脱出螺钉连接,另一端与所述左扳手头或所述右扳手头连接。
所述蜗轮和所述蜗杆轴的模数相等,所述蜗轮和所述蜗杆轴的齿数比大于8。
所述蜗轮和所述蜗杆轴的模数均为2;所述蜗轮的齿数为29,所述蜗杆轴的齿数为2。
所述蜗轮通过平键槽与所述蜗轮轴连接,并且通过设置于所述蜗轮轴上的蜗轮固定轴肩进行轴向定位;
所述蜗轮轴通过左轴套和右轴套安装在所述固定座上,并且通过左定位轴肩和右定位轴肩进行轴向限位。
所述蜗杆轴上设有与所述蜗轮啮合的蜗杆螺旋齿,所述蜗杆轴的输入端通过前轴套固定,并且通过前定位轴肩轴向定位;所述蜗杆轴的后端设有闷盖,并且通过后定位轴肩轴向定位。
所述省力机构可滑动地设置于固定转接件上。
所述舱内载荷支撑框架为方形结构,且底部四角分别设有所述角件;所述舱内载荷支撑框架的顶部前端两侧分别设有所述角件。
本发明的优点与积极效果为:
1.本发明结构紧凑,体积和质量较小,天地间运输占用资源小,同时便于宇航员在相对狭小的舱内空间作业。
2.本发明的省力装置可实现高效的扭矩和转动运动传递,还具有单输入、双向输出的特点,满足宇航员在轨操作能力和拆装螺钉所需扭矩及操作空间要求。
3.本发明充分考虑了人机工效学和在轨密封舱内的操作及环境特点,解决了舱内载荷支撑框架的在轨拆装的难题,为空间站舱内设施及载荷的拆装提供了有力支撑和保障。
附图说明
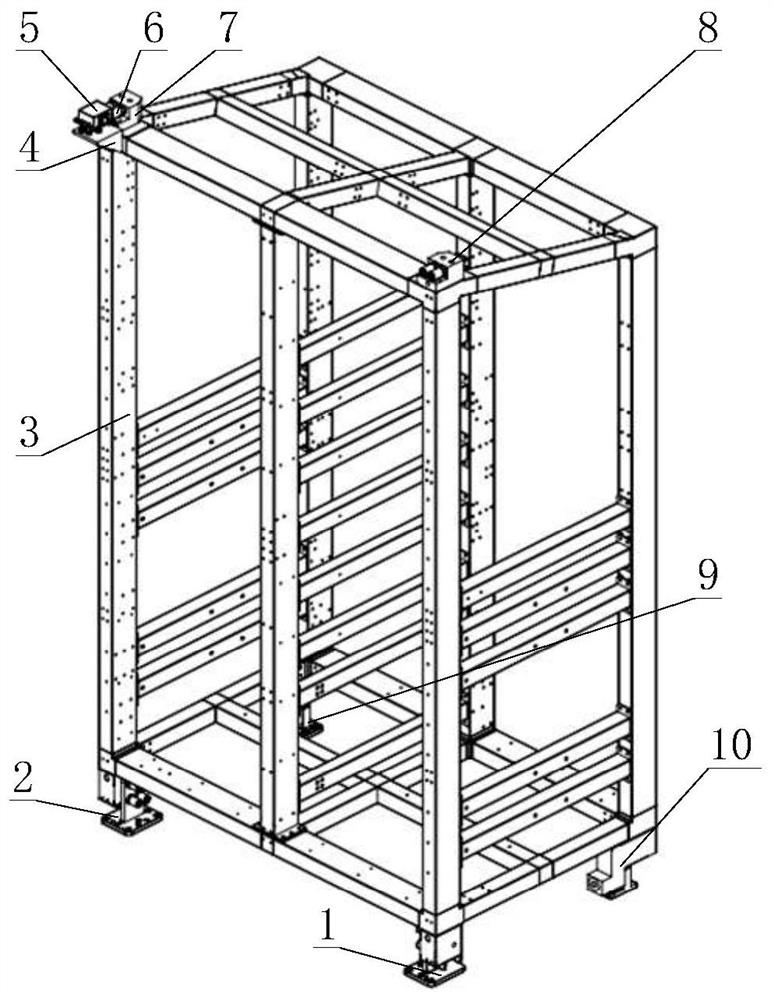
图1为本发明一种空间站舱内载荷支撑框架在轨操作省力装置的结构示意图;
图2为本发明的操作省力装置的外部结构示意图;
图3为本发明的操作省力装置的内部结构示意图;
图4为本发明的支撑框架左上部装拆操作装置示意图之一;
图5为本发明的支撑框架左上部装拆操作装置示意图之二;
图6为本发明的支撑框架左前下部装拆操作装置示意图之一;
图7为本发明的支撑框架左前下部装拆操作装置示意图之二;
图8为本发明的支撑框架左前下部装拆操作装置示意图之三;
图9为本发明的支撑框架左前下部装拆操作装置示意图之四;
图10为本发明的支撑框架左后下部装拆操作装置示意图。
其中:1为右前下角件,2为左前下角件,3为舱内载荷支撑框架,4为上部固定转接件,5为省力机构,501为固定座,502为壳体,503为蜗轮轴,503-1为左扳手头,503-2为右定位轴肩,503-3为蜗轮固定轴肩,503-4为平键槽,503-5为左定位轴肩,503-6为右扳手头,504为闷盖,505为左轴套,506为蜗杆轴,506-1为后定位轴肩,506-2为前定位轴肩,506-3为蜗杆螺旋齿,507为前轴套,508为蜗轮,509为右轴套,6为不脱出螺钉,601为第一不脱出螺钉,602为第二不脱出螺钉,603为第三不脱出螺钉,604为第四不脱出螺钉,605为第五不脱出螺钉,606为第六不脱出螺钉,607为第七不脱出螺钉,7为左上角件,8为右上角件,9为左后下角件,10为右后下角件,11为第一下部固定转接件,12为第二下部固定转接件,13为第三下部固定转接件,14为长杆扳手。
具体实施方式
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
如图1所示,本发明提供的一种空间站舱内载荷支撑框架在轨操作省力装置,包括舱内载荷支撑框架3、固定转接件、省力机构5、不脱出螺钉6及角件,其中舱内载荷支撑框架3的底部及顶部均设有角件,各角件通过不脱出螺钉6与空间站舱段标准接口连接;省力机构5设置于固定转接件上,固定转接件与舱内载荷支撑框架3连接,使省力机构5与角件上的不脱出螺钉6相对应,省力机构5通过扭矩倍增拧紧或松开不脱出螺钉6,从而轻松实现舱内载荷支撑框架3的安装或装拆。
如图2-3所示,省力机构5包括固定座501、壳体502、蜗轮轴503、蜗杆轴506及蜗轮508,其中固定座501与固定转接件连接;壳体502设置于固定座501上,蜗轮轴503和蜗杆轴506相互垂直地设置于壳体502内,蜗轮508套装在蜗轮轴503上,并且与蜗杆轴506啮合,蜗轮轴503的一端或两端为扭矩输出端。
进一步地,蜗轮轴503的两端分别设有位于壳体502外侧的左扳手头503-1和右扳手头503-6,左扳手头503-1和右扳手头503-6用于与不脱出螺钉6对接。
如图3所示,本发明的实施例中,蜗轮508通过平键槽503-4与蜗轮轴503连接,并且通过设置于蜗轮轴503上的蜗轮固定轴肩503-3进行轴向定位;蜗轮轴503通过左轴套505和右轴套509安装在固定座501上,并且通过左定位轴肩503-5和右定位轴肩503-2进行轴向限位。蜗杆轴506上设有与蜗轮508啮合的蜗杆螺旋齿506-3,蜗杆轴506的输入端通过前轴套507固定,并且通过前定位轴肩506-2轴向定位;蜗杆轴506的后端设有闷盖504,并且通过后定位轴肩506-1轴向定位。
本发明的实施例中,蜗轮508和蜗杆轴506的模数相等,蜗轮508和蜗杆轴506的齿数比即传动比大于8时,可满足宇航员在轨操作力要求。具体地,蜗轮508和蜗杆轴506的模数均为2;蜗轮508的齿数为29,蜗杆轴506的齿数为2,通过蜗杆轴506和蜗轮508的啮合传动可实现扭矩倍增。
进一步地,省力机构5可滑动地设置于固定转接件上,以便调整省力机构5与不脱出螺钉6之间的相对位置。
在上述实施例的基础上,空间站舱内载荷支撑框架在轨操作省力装置还包括长杆扳手14,长杆扳手14的一端与不脱出螺钉6连接,另一端与左扳手头503-1或右扳手头503-6连接。
本实施例中,舱内载荷支撑框架3为方形结构,且底部四角分别设有角件;舱内载荷支撑框架3的顶部前端两侧分别设有角件;各角件上均至少设有一个不脱出螺钉6。
具体地,舱内载荷支撑框架3的顶部设有左上角件7和右上角件8,底部设有左前下角件2、右前下角件1、左后下角件9及右后下角件10,在舱内载荷支撑框架3的左侧部分,左上角件7上设有第一不脱出螺钉601和第二不脱出螺钉602,左前下角件2上设有第三不脱出螺钉603、第四不脱出螺钉604、第五不脱出螺钉605及第六不脱出螺钉606,左后下角件9上设有第七不脱出螺钉607。舱内载荷支撑框架3的右侧部分的角件连接与左侧部分相同。
本发明利用蜗轮蜗杆传动,设计的在轨操作省力装置能够起到扭矩倍增的作用,放大倍率为14.5;通过标准扭矩扳手与省力机构输入端连接,蜗轮与蜗杆啮合,将输入转速和扭矩传递给蜗轮及与其固连的蜗轮轴,蜗轮轴与不脱出螺钉轴向连接,实现舱内载荷支撑框架六角点处与空间站舱段的拆装,从而达到在轨操作与维修的目的。
实施例一
如图4所示,固定转接件包括三角结构的上部固定转接件4,上部固定转接件4安装固定在舱内载荷支撑框架3的左上角处,固定座501固定于上部固定转接件4上,实现省力机构5的固定并为其提供反作用支撑力矩,此时左扳手头503-1与第一不脱出螺钉601配合;将标准力矩扳手头部与蜗杆轴506的输入端连接并施加主动力使其逆时针转动,蜗杆轴506和蜗轮508啮合并将转动运动和力矩传递到左扳手头503-1,左扳手头503-1顺时针转动并带动与其配合的第一不脱出螺钉601一起转动,第一不脱出螺钉601通过与其固连的左上角件7使得舱内载荷支撑框架3的该处安装点与空间站舱段内的标准接口拧紧;反之,则拧松;
实施例二
如图5所示,上部固定转接件4向右侧水平移动一段距离并与舱内载荷支撑框架3的预留接口固定,移动距离为第一不脱出螺钉601和第二不脱出螺钉602的轴间距离,使得左扳手头503-1与第二不脱出螺钉602配合;重复实施例一中的步骤,可实现第二不脱出螺钉602的拧紧或拧松;
实施例三
如图6所示,固定转接件还包括第一下部固定转接件11,第一下部固定转接件11固定在舱内载荷支撑框架3的左前下角处,省力机构5固定于第一下部固定转接件11上并为省力机构5提供反作用支撑力矩,此时右扳手头503-6与第三不脱出螺钉601配合;第三不脱出螺钉601通过与其固连的左前下角件2使得舱内载荷支撑框架3的该处安装点与空间站舱段内的标准接口拧紧;与实施例一中的步骤相似,通过标准力矩扳手头部与蜗杆轴506的输入端连接并施加主动力使其逆时针或顺时针转动,可实现第三不脱出螺钉603的拧紧或拧松。
实施例四
如图7所示,省力机构5水平向后平移至右扳手头503-6与第四不脱出螺钉604连接,平移距离为第三不脱出螺钉603和第四不脱出螺钉604的轴间距离;固定座501与第一下部固定转接件11通过螺钉固定;重复实施例三中的步骤,可实现第四不脱出螺钉604的拧紧和拧松。
实施例五
如图8所示,固定转接件还包括第二下部固定转接件12,第二下部固定转接件12固定在舱内载荷支撑框架3的左前下角处,省力机构5的右扳手头503-6与第五不脱出螺钉605连接,固定座501与第二下部固定转接件12通过螺钉固定;重复实施例三中的步骤,可实现第五不脱出螺钉605的拧紧和拧松;
实施例六
如图图9所示,省力机构5向后移动,使右扳手头503-6与第六不脱出螺钉606连接,固定座501与第二下部固定转接件12通过螺钉固定;重复实施例三中的步骤,可实现第六不脱出螺钉606的拧紧和拧松;
实施例七
如图10所示,固定转接件还包括第三下部固定转接件13,第三下部固定转接件13安装于舱内载荷支撑框架3的左前下部并为省力机构5提供固定支撑;省力机构5的左扳手头503-1通过长杆扳手14与第七不脱出螺钉607轴向连接;第七不脱出螺钉607安装于左后下角件9内部空心轴内;与上述实施例的步骤相似,通过标准力矩扳手头部与蜗杆轴506的输入端连接并施加主动力使其顺时针或逆时针转动,可实现第七不脱出螺钉607的拧紧或拧松;
以舱内载荷支撑框架3左侧为例,通过实施例一和实施例二,可实现舱内载荷支撑框架3左上角处与空间站舱段的安装和拆装;通过实施例三至实施例六,可实现舱内载荷支撑框架3左前下角处与空间站舱段的安装和拆装;通过实施例七,可实现舱内载荷支撑框架3左后下角处与空间站舱段的安装和拆装。舱内载荷支撑框架3的右侧与左侧结构对称,原理相同,可采用相似步骤完成与空间站舱段的拆装,在此不再赘述。本实施例,实现舱内载荷支撑框架3六角点处与空间站舱段的安装与拆装。
本发明通过固定转接件提供反作用力矩,拧紧或松开不脱出螺钉,从而实现舱内载荷支撑框架的安装与装拆;本发明结构体积和质量较小,利用蜗轮蜗杆传动的特点,设计的在轨操作省力装置能够起到扭矩倍增的作用,具有单输入、双向输出的特点,可实现高效的扭矩和转动运动传递;解决了舱内载荷支撑框架的在轨拆装的难题,为空间站舱内设施及载荷的拆装提供了有力支撑和保障。
以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
- 一种空间站舱内载荷支撑框架在轨操作省力装置
- 空间站舱内载荷支撑框架在轨操作省力装置