控制致动器系统的方法和使用所述方法的航空器
文献发布时间:2023-06-19 10:25:58
技术领域
本公开涉及一种控制致动器系统的方法,该致动器系统包括k个致动器,该方法优选用于控制多致动器飞行器,其中所述致动器优选被设计为多致动器飞行器的各个推进单元。
本公开还涉及一种航空器,特别是电推进的VTOL(垂直起降)航空器,包括具有k个致动器的致动器系统,其中所述致动器被设计为航空器的各个推进单元。
背景技术
在过度确定的致动器系统中,例如多致动器飞行器(MAV),其中每个致动器可被识别为航空器的推进装置,对于实现给定任务,存在不同可能性,例如给定的飞行方向。可以以不同的方式/部分将给定的任务分配给不同的致动器。换句话说,每个致动器都接收相应的控制信号以控制其运行,从而所有致动器的联合运行可以实现所述给定任务(例如,沿期望的方向飞行)。在本申请人提交的德国申请DE 10 2019 101 903中描述了一种实现该目的的方法。
迄今为止,现有技术中还没有考虑致动器的健康状态/特性的分配方法。致动器,例如MAV的电机,可以提供几乎无限长时间的连续动力,即在给定任务期间,或者在紧急情况或故障情况下,直到MAV安全着陆为止,而如果需要更多功率,它们可以提供峰值功率,但是在过热之前只能在一定时间内提供峰值功率。这会导致电机性能下降或损失。结果,这可能导致对其余电机的更高的功率需求,这意味着由于不断增加的过载级联而导致其余电机的进一步故障。
发明内容
本公开的目的是提供一种用于过度确定的致动器系统的分配方法,其形式为用于控制包括k个致动器的致动器系统的方法,该方法在考虑致动器在特定时间范围内的可用物理容量方面的特性的情况下将整个系统的给定任务分配给多个致动器,从而避免了上述下降和过载情况,特别是与多致动器飞行器(MAV)相关。
该目的是通过如方案1所限定的用于控制致动器系统的方法以及如方案12所限定的航空器(或MAV)来实现的。在其他方案中限定了有利的其他实施方式。
根据本公开,提出了一种用于控制致动器系统的方法,该致动器系统包括k个致动器,该方法优选用于控制多致动器飞行器,其中所述致动器优选被设计为多致动器飞行器的各个推进单元。每个所述致动器在运行期间接收控制输入(信号)u
每当本申请提到“将根据调整后的加权因子w
此外,根据本公开,提出了一种航空器或MAV,特别是电推进的VTOL航空器(eVTOL),其包括:包括k个致动器的致动器系统,其中所述致动器被设计为航空器的各个推进单元,其中每个所述致动器在运行期间适于从至少一个飞行控制单元接收控制输入u
为简单起见,量u
根据本公开的(分配)方法可以应用于各种各样的系统,例如航空器、机器人、致动不足和/或过度确定的系统等。为了更好地理解,可以用牛顿-欧拉(Newton-Euler)原理或拉格朗日方法推导出的这类系统的运动方程描述如下:
其中
通过以下等式在实际控制输入
u
其中
请注意,系统可能致动不足也可能过度确定,即在k>m>n或Rank(G(x)D)<n的情况下。
基于等式1中描述的系统动力学,使用状态反馈控制定律(对于MAV-VTOL,其包括例如姿态、高度、位置/速度控制、路径/轨迹跟踪等),可以计算期望的u
u=D
在当前上下文中,通过考虑权重矩阵
其中应该记得实际上是D=D(u
优选地,航空器还包括用于提供代表航空器的物理和运行状态的数据的传感器,其中至少一个飞行控制单元被设计成根据所述传感器数据确定所述伪控制输入u
在根据本公开的方法的相应的优选实施例中,可以基于伪控制输入u
另外,也可以考虑u
D
W为所述权重矩阵,其中逆分配矩阵D
在系统的一个或多个致动器接近其物理极限的情况下,该方法确实会主动改变W,u
在根据本公开的方法的优选实施例中,所述第一设定阈值被定义为相当软的极限,其在下文中被称为可用控制极限,并表示为:
其中
注意,每个致动器的值u
因此,在根据本公开的方法的优选实施例中,所述第一设定阈值包括每个致动器的可用控制极限,所述可用控制极限是给定致动器可以连续工作而不会过载的控制输入。
此外,对于每个致动器,例如对于第i个致动器,可以定义f
·控制值/极限本身,即f
·与这些控制值/极限相对应的相应致动器功耗,
·致动器的任何其他可测量、可观测或可控制的值。
优选地,所考虑的系统,例如航空器,包括与致动器连接的传感器装置,该传感器装置被布置和设计用于测量对应于f
对于航空器,
·
·
·
这些值例如从致动器制造商处知道,或者可以基于仿真、实验、经验等来设置。
在根据本公开的方法的优选实施例中,可以定义表示为
在根据本公开的方法的优选实施例中,可以定义其他计时器(计数器)和相应的时间限制(计数器阈值):
·
·
·
·
在本上下文中,代替计时器或计数器
在根据本公开的方法的优选实施例中,每当所述第一比较得出所述控制输入u或其函数f(u)超过所述第一设定阈值,例如
在根据本公开的方法的另一优选实施例中,每当比较得出所述控制输入u或其函数f(u)超过相应设定阈值,例如f
例如,所述加权函数可以是所述第一计数器的所述当前值的S形函数或任何其他优选的连续函数,例如,被定义为“1-S形”的函数,所述加权函数最优选地在0到1之间的范围内,使得给定致动器被充分考虑(1),或从分配中排除(0),或被认为权重在0与1之间,具体取决于所述第一计数器的当前值。这考虑到所述致动器已经超过其“可用”极限运行了一段时间。优选地,加权函数的值随着所述第一计数器或第二计数器的值的增加而减小。
在根据本公开的方法的优选实施例中,如果所述第一计数器超过第一设定计数器阈值,例如上面定义的
在根据本公开的方法的另一优选实施例中,对于至少一些致动器,基于控制输入u或其函数f(u)与所述控制输入u或其函数f(u)的至少第二设定阈值(例如,
在根据本公开的方法的又一个实施例中,所述第二设定阈值可以降低安全余量。换句话说,如果
在根据本公开的方法的另一优选实施例中,如果所述第一计数器超过所述第一设定计数器阈值(例如,
在根据本公开的方法的又一个优选实施例中,对于至少一些致动器,基于控制输入u或其函数f(u)与所述第一设定阈值,以及所述第三计数器与所述第三设定计数器阈值的第三比较,如果所述第三比较得出所述控制输入u或其函数f(u)不超过所述第一设定阈值,例如
在根据本公开的方法的另一实施例中,如果所述第三比较得出所述控制输入u或其函数f(u)不超过所述第一设定阈值,例如,
在根据本公开的方法的另一实施例中,如果随后的比较得出所述第一计数器低于第一下限,例如,零,或所述第二计数器低于第二下限,例如,零,则所述第一计数器或所述第二计数器分别被重置为其初始值。这确保了所述第一计数器和第二计数器为下限。
根据本公开的方法的又一个实施例中,如果所述第一计数器和所述第二计数器都具有它们各自的初始值,则至少将w
在根据本公开的方法的另一实施例中,如果u
对于本领域技术人员将显而易见的是,以上定义的所有计数器可以可替代地相反地操作,即,减小而不是增大,反之亦然。
对于技术人员显而易见的是,所有提到的时间间隔优选地对应于相同或共同的时间间隔。此外,优选地,上述所有计数器以公共计数器间隔增加/减小,该公共计数器间隔可以对应于时间步长,例如,在一个控制循环周期内。
就高度优选的实施方式而言,本公开的要点可以逐步总结如下:
1、当f(u
2、当这些计数器(或温度测量值)达到自己的极限
3、当冷却阶段结束时,所有计数器和最大控制极限均设为初始值,即标称条件。
4、逻辑重复。
5、仅当rank(D)>d时,例如d=4并且u
附图说明
现在将参考示出了本公开的特定实施例的附图来描述本公开的其他特征和优点。
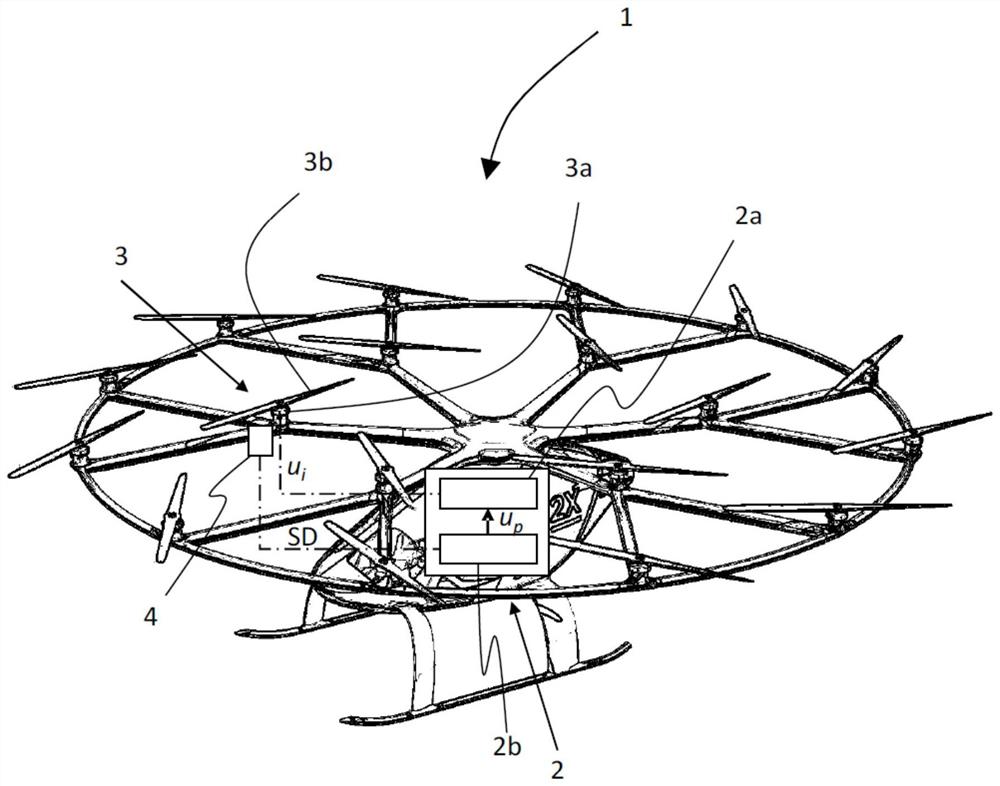
图1示出了根据本公开的航空器的示意图;
图2示意性地示出了每个致动器的控制极限
图3示出了由图1中的航空器的飞行控制单元执行的计算机算法的可能逻辑;以及
图4以1-S形函数的形式示出了简单的加权函数。
具体实施方式
图1显示了示例性的MAV-eVTOL航空器,由附图标记1表示。航空器1具有飞行控制单元2,该飞行控制单元2与呈航空器推进单元形式的多个致动器3操作连接,每个致动器3均具有电机3a和螺旋桨3b。为了清楚起见,在图1中仅清楚地标记了一个致动器。根据图1的示例,在(每个)致动器3附近,定位有至少一个传感器4,用于测量致动器3的运行状态。这可以包括但不限于测量致动器的温度、电功率消耗、转速(RPM)等,以确定其当前的运行状态和健康状态(例如,过热)。航空器1上还有许多与飞行有关的传感器,它们确定了飞行控制和与安全有关的数据(姿态、空速、对地速度、防撞数据等),这些是本领域技术人员已知的并且在此未示出。这些传感器4提供可以由飞行控制单元2使用的航空器状态数据SD。这样,飞行控制单元2(通过适当的算法)使用已知的状态反馈控制定律(对于MAV-VTOL,其包括例如姿态、高度、位置/速度控制、路径/轨迹跟踪等)来根据等式1中所述的系统动力学计算所需的控制输入u
飞行控制单元2包括算法2a(即,包括执行所述算法2a的计算装置),该算法2a接收所述期望的控制输入并且执行根据本公开(或其实施例)的方法,以便对致动器分配进行加权和整形。相应计算的输出被提供给致动器控制装置2b,该致动器控制装置2b向各个致动器3提供实际的控制输入u
图2示意性地示出了每个致动器的控制极限
在图2中,
图3示出了由图1中的航空器的飞行控制单元执行的计算机算法的可能逻辑,该算法使用在图2中之前给出并部分示出的定义。所述算法称为致动器命令分配的加权和整形算法,由飞行控制单元2(图1)执行,以为航空器的致动器提供控制输入u
图3的算法在某种程度上是不言自明的,因此这里的简短描述就足够了。它包含三个程序:INITIALIZE(第1-3行),REWEIGHTRESHAPEALLOCATION(第4-29行)和WEIGHTEDALLOCATION(第30-31行)。INITIALIZE程序初始化每个致动器(推进单元)的冷却计时器(或计数器):
REWEIGHTRESHAPEALLOCATION程序在第7行中包括针对每个致动器的f
图4以示例方式说明了这一点,其中w
再次参考图3,WEIGHTEDALLOCATION程序通过提供包括w
- 控制致动器系统的方法和使用所述方法的航空器
- 电动变桨控制系统和用于操作至少一个转子叶片的方法以及使用所述系统来执行所述方法