栓系监视无人机的基于交通工具的部署
文献发布时间:2023-06-19 11:06:50
本申请案主张2019年6月4日申请的第16/431,324号美国专利申请案及2018年7月26日申请的第16/046,721号美国专利申请案的优先权,所有所述申请案的全部内容以引用的方式并入本文中。
技术领域
本发明涉及用于第一响应器及其它公共安全人员的无人驾驶飞行系统。
发明内容
在一个实施例中,本发明提供一种无人驾驶飞行系统,其包含基站、无人驾驶飞行器(“UAV”)及在基站与UAV之间伸展的系绳。基站包含耦合到交通工具的基本壳体、电源、控制器及耦合到基本壳体的第一耦合机构。UAV包含UAV壳体、耦合到UAV壳体的推进系统、第二耦合机构及耦合到UAV壳体的至少一个相机。系绳在第一耦合机构与第二耦合机构之间伸展,并且经配置以向UAV传输电力,以及在基站控制器与UAV之间传输数据信号。
在一些实施例中,系绳经配置用于在基本壳体内可缩回地存储。在一些实施例中,第一耦合机构进一步包括线轴、电动机、张紧装置及摩擦制动器中的一或多者。在一些实施例中,UAV包含多个相机。在一些实施例中,多个相机围绕所述UAV壳体的底面周向安置。在一些实施例中,无人驾驶飞行系统进一步包含经配置以检测基站与UAV之间的相对定向的传感器,其可安置在UAV、基站或其各种组合上。在一些实施例中,基站控制器进一步经配置以至少部分基于基站及UAV的相对定向来控制UAV的推进系统及相机。在一些实施例中,基站控制器经配置以将来自相机的图像数据存储在控制器的存储器中,并且经配置以响应于从安全同步点检测到预定无线信号而经由收发器自动传输图像数据的一部分。
在一些实施例中,UAV进一步包含一或多个LED,其经配置以指示无人驾驶飞行系统的一或多个状态。在一些实施例中,基站电源电耦合到交通工具的电系统。在一些实施例中,基站的电源包含保留在基站壳体内的电池。在一些实施例中,无人驾驶飞行系统进一步包含与基站控制器无线通信的跟踪装置。在一些实施例中,基站控制器经配置以至少部分基于跟踪装置的位置来控制UAV的推进系统及相机。在一些实施例中,基本壳体经配置以牢固地保留或围封UAV壳体。
在一些实施例中,本发明提供一种包含安装在交通工具上的监视平台及遥感器平台的监视系统。安装在交通工具上的监视平台包含耦合到交通工具的基本壳体、控制器及经配置以传输及接收数据信号的可缩回系绳。遥感器平台包含UAV壳体、推进系统及传感器阵列。UAV壳体经配置以耦合到可缩回系绳的一端。推进系统经配置以经由可缩回系绳从控制器接收电力及数据信号,并提供遥感器平台的持续飞行。传感器阵列耦合到UAV壳体,并且包含经配置以经由可缩回系绳将图像数据传输到控制器的至少一个相机。
在一些实施例中,监视平台进一步包含耦合到可缩回系绳的张紧装置。在一些实施例中,控制器经配置以致动张紧装置。在一些实施例中,传感器阵列包含围绕UAV壳体的底面周向安置的多个相机。在一些实施例中,可缩回系绳的端与遥感器平台的质心轴向对准。在一些实施例中,传感器阵列进一步包含超声波传感器、激光雷达传感器、温度传感器、空速传感器、气压传感器及定向传感器中的一或多者。在一些实施例中,还可使用红外传感器或相机。在其它实施例中,可使用面部辨识技术。在一些实施例中,控制器经配置以至少部分基于从传感器阵列接收的数据信号来控制推进系统。
在一些实施例中,控制器经配置以将来自传感器阵列的传感器数据存储在控制器的存储器中。在一些实施例中,控制器经配置以响应于从安全同步点检测到预定无线信号而经由收发器自动传输传感器数据的一部分。在一些实施例中,遥感器平台进一步包含经配置以指示无人驾驶飞行系统的一或多个状态的一或多个LED。在一些实施例中,控制器电耦合到交通工具的电系统。在一些实施例中,控制器经配置以至少部分基于交通工具的操作状态来控制推进系统。在一些实施例中,监视系统包含跟踪装置。在一些实施例中,控制器经配置以至少部分基于跟踪装置的检测到的位置来控制推进系统及至少一个相机。
在一些实施例中,本发明提供一种包含UAV及基站的无人驾驶飞行系统。UAV包含电接口、耦合到电接口的推进系统及耦合到电接口的传感器阵列。传感器阵列包含至少一个相机及定向传感器。基站包含耦合到交通工具的基本壳体、耦合到电接口的可伸展系绳、以及经由可伸展系绳耦合到推进系统及传感器阵列的控制器。控制器包含电源、至少一个处理器、收发器及存储程序指令的非暂时性计算机可读存储器。程序指令经配置以由至少一个处理器执行以实施飞行控制、传感器控制、传感器数据的存储及传感器数据的传输。
在另一实施例中,无人驾驶飞行子系统包含可安装在交通工具上的灯条。灯条包含外围及多个灯,其经配置以通过外围的至少一部分照明。灯条进一步界定一体积,在所述体积内定位有无人驾驶飞行器垫及系绳伸展及缩回机构。子系统进一步包含具有至少一个相机的无人驾驶飞行器。系绳可与系绳伸展及缩回机构一起操作,并可从系绳伸展及缩回机构伸展到无人驾驶飞行器。系绳经配置以在无人驾驶飞行器的飞行期间向无人驾驶飞行器传输电力,并且向无人驾驶飞行器传输数据信号且从无人驾驶飞行器传输数据信号。
在另一实施例中,第一响应器交通工具包含交通工具主体(其一部分界定交通工具顶)及安装在交通工具上的监视平台。平台包含基站,其界定一体积,在所述体积内定位有无人驾驶飞行器垫及系绳伸展及缩回机构。平台还包含灯条,其具有与交通工具的控制器可操作通信的多个灯。无人驾驶飞行器经配置用于从基站进行栓系部署及在基站内进行运输。无人驾驶飞行器经配置以从定位在交通工具主体内的操作者部署。
在另一实施例中,一种无人驾驶飞行器子系统包含基站,其界定一体积,在所述体积内定位有无人驾驶飞行器垫及系绳伸展及缩回机构。子系统还包含可安装在交通工具上的灯条。
通过考虑详细描述及附图,本发明的其它方面将变得显而易见。
附图说明
图1说明无人驾驶飞行系统的一个实施例。
图2是根据一些实施例的无人驾驶飞行系统的框图。
图3是根据一些实施例的无人驾驶飞行系统的框图。
图4是根据第一实施例且处于第一状态中的无人驾驶飞行系统的透视图。
图5是处于第二状态中的图4的无人驾驶飞行系统的透视图。
图6是图4的无人驾驶飞行系统的一部分的特写透视图。
图7是图4的无人驾驶飞行系统的部分的剖切特写透视图。
图8是根据另一实施例及处于第一状态中的无人驾驶飞行系统的透视图。
图9是处于第二状态中的图8的无人驾驶飞行系统的透视图。
图10是图8的无人驾驶飞行系统的一部分的特写透视图。
图11是图8的无人驾驶飞行系统的壳体部分的透视图。
图12是图8的无人驾驶飞行系统的壳体部分的另一透视图。
图13是图8的无人驾驶飞行系统的壳体部分的顶视图。
图14是根据另一实施例及处于第一状态中的无人驾驶飞行系统的透视图。
图15是处于第二状态中的图14的无人驾驶飞行系统的特写透视图。
具体实施方式
在详细解释本发明的任何实施例之前,应理解,本发明在其应用上不限于以下描述中阐述的或附图中说明的组件的构造及安置的细节。本发明能够支持其它实施例,并且能够以各种方式实践或实行。
图1说明根据一些实施例的无人驾驶飞行系统100。无人驾驶飞行系统100包含基站105、无人驾驶飞行器(“UAV”)110及在基站105与UAV 110之间伸展的系绳115。基站105安装在交通工具120上,并且可集成到灯条中,如所展示。在所说明实施例中,交通工具120是巡逻车,但可为任何其它交通工具,例如救护车、消防车、摩托车、船艇或其它应急交通工具。UAV包含用以使UAV 110保持在空中的推进系统,以及一或多个相机及传感器。系绳115经配置以将UAV 110固定到基站105,以及将电力从基站105传达到UAV 110,例如用于推进系统。系绳115还经配置以在基站105与UAV 110之间传输数据信号,例如以使基站105控制推进系统或相机,或从相机或传感器接收数据。因此,UAV 110的部署、飞行及回收可由基站105控制。举例来说,基站105可部署UAV 110以监测交通工具120周围的区域,例如用相机或传感器监测。替代地,UAV110可在从基站105接收电力的同时维持其自身的自主控制。在一些实施例中,飞行控制及/或传感器控制由基站105及UAV 110协同处置。当不在飞行中时,UAV 110经配置以与基站105对接。基站105包含当UAV 110与基站105对接时保留UAV 110的壳体及盖系统。举例来说,壳体可包含保护UAV 110免受篡改或恶劣天气的盖子。
图2说明根据一些实施例的无人驾驶飞行系统200的框图。无人驾驶飞行系统200包含基站205、UAV 210及UAV 210与基站205之间的系绳215。UAV 210包含UAV壳体220,例如轻质铝、玻璃纤维、聚合物或碳纤维壳。UAV 210进一步包含推进系统225、UAV控制器230、传感器阵列235及耦合到UAV壳体220的电力/数据接口240。推进系统225、UAV控制器230及传感器阵列235经由电子链路245电子耦合到电力/数据接口240。控制器经由电子链路245电子耦合到推进系统225及传感器阵列235。因此,电力及/或数据可直接从电力/数据接口240向推进系统225、传感器阵列235及控制器中的一或多者直接供应,或可由UAV控制器230介导。举例来说,经由以太网供应的电力(“POE”)可在电力/数据接口240处接收并供应到UAV控制器230。在一些实施例中,可包含各种电子存储器、处理器、嵌入式电路系统及类似者的UAV控制器230接收POE,分离所供应电力及所传达数据,基于推进系统225及传感器阵列235的所需电压或电流来调适所供应电力,并向推进系统225及传感器阵列235提供电力及数据。
在一些实施例中,UAV控制器230从传感器阵列235的一或多个传感器接收传感器数据,并将传感器数据传达到电力/数据接口240。在其它实施例中,传感器阵列235将来自一或多个传感器的传感器数据直接传达到电力/数据接口240。在其它实施例中,来自第一多个传感器的传感器数据可从传感器阵列235传输到UAV控制器230,来自第二多个传感器的传感器数据从传感器阵列235传输到电力/数据接口240。举例来说,在传感器阵列235包含加速度计及一或多个相机的情况下,加速度计数据可被传达到UAV控制器230,而来自一或多个相机的图像数据被传达到电力/数据接口240。作为另外实例,可将图像数据传达到UAV控制器230及电力/数据接口240两者。因此,系统的计算需求可根据需要在UAV控制器230与系统200的其它控制器之间分配或按比例调整。
在一些实施例中,传感器阵列235包含围绕UAV壳体220的底面周向安置的多个相机。在一些实施例中,传感器阵列235包含针对不同的环境光条件、距离、分辨率、帧速率、视野等以不同方式配置的相机。在一些实施例中,传感器阵列235进一步包含至少一个传感器,其经配置用于检测UAV 210与基站205之间的相对定向。在一些实施例中,可用一或多个磁强计、加速度计、GPS传感器及类似者来感测相对定向。在其它实施例中,可用一或多个相机感测相对定向。举例来说,各种图像及视频分析技术(例如,视差计算)可应用于来自多个相机的图像数据,以感测或确定UAV 210与基站205之间的相对定向。此外,在一些实施例中,可基于UAV 210的相对定向或UAV 210与基站205之间的相对定向来控制相机中的一或多者。在一些实施例中,四个相机围绕UAV壳体定位以经由四个不同通道提供360度观看及数据,使得可提供用于证据收集目的的数据。在其它实施例中,可出于此目的设置少于或多于四个相机。
推进系统225包含一或多个推力产生装置,例如各种螺旋桨、风扇、喷气机、火箭、推力器等。推进系统225从电力/数据接口240、UAV控制器230或其组合接收电力及控制信号,以控制相应推力产生装置的推力矢量。因此,推进系统225因此经配置以为UAV 210提供持续或不定的飞行,举例来说,根据需要提供静态或动态飞行。在一些实施例中,基于UAV210与基站205之间的相对定向来控制推进系统225。举例来说,推进系统225可经控制以维持UAV 210相对于基站205的静态位置或遵循相对于基站205的一或多个路径。
除电子链路245之外,电力/数据接口240还经由系绳215可通信地耦合到基站205。在所说明实施例中,系绳215包含有线连接215A,其经配置以在基站205与UAV 210之间传输POE。在一些实施例中,系绳215可包含离散有线电力及数据连接。在一些实施例中,系绳215包含保护鞘套215B。在一些实施例中,系绳215套有热塑性鞘套(例如,聚氯乙烯(PVC))。替代地,或另外,保护鞘套215B柔性地及机械地将UAV壳体220耦合到基站壳体。因此,系绳215上的各种应力由保护鞘套215B分布,而不是传递到有线连接215A。在一些实施例中,系绳215直接连接到基站壳体250。在其它实施例中,系绳215耦合到线轴265,线轴265耦合到基站壳体250。
基站壳体250经配置用于安装到交通工具(例如,图1的交通工具120),并且由弹性材料制成,例如铝、玻璃纤维、聚合物或碳纤维壳。基站壳体250进一步包含电力/数据接口255、耦合到线轴265的电动机260、盖系统270以及耦合到电力/数据接口255及电动机260的基站控制器275。基站控制器275进一步耦合到电力供应器280、网络接口285及盖系统270。电力/数据接口255大体上类似于UAV 210的电力/数据接口240,并且耦合到系绳215的有线连接215A。在所说明实施例中,电力/数据接口255在线轴265处耦合到有线连接215A。因此,电力及数据(例如,POE)可在基站205的电力/数据接口255与UAV 210的电力/数据接口240之间经由系绳215进行传达。线轴265进一步耦合到电动机260,且借此经配置用于系绳215的调整。因此,系绳215可根据需要伸展或缩回。另外,电动机260及线轴265可经配置用于向系绳215的保护鞘套215B施加力。举例来说,电动机260及线轴265可经配置用于在大风中进行电子制动,或收回损坏的UAV 210。因此,UAV 210的部署、飞行及回收得到改进。尽管已经描述及说明线轴265、电动机260及电子制动,但可根据需要使用任何合适张紧或系绳调整机构。
基站控制器275经由电子链路290耦合到基站205的各种组件。控制器从电力供应器280接收电力。在所说明实施例中,电力供应器280耦合到安装基站205的交通工具的电系统,以及基于基站205及/或UAV 210的一或多个组件的电压/电流要求来调适从交通工具接收的电力。在一些实施例中,电力供应器280进一步包含一或多个能量存储装置,例如锂离子电池。
盖系统270从电力供应器280接收电力,并且经配置以打开及关闭壳体的盖,例如盖子或分段门。当UAV 210与基站205对接时,盖经配置以围封基站205、系绳215及UAV 210。当UAV 210处于空中配置中时,盖经配置以最小化对UAV 210或系绳215的移动的干扰。在一些实施例中,盖系统270包含一或多个电动机、弹性构件、闩锁或配置以用于打开盖、关闭盖或将盖维持在打开或关闭位置的其它装置。盖系统270的致动由基站控制器275控制。因此,举例来说,当交通工具处在运动中时,UAV 210被安全地保留在基站壳体250内。
基站控制器275包含各种电子处理器及存储器,其存储可由处理器执行以执行本文所描述的功能性的程序指令。基站控制器275进一步耦合到网络接口285。网络接口285经配置用于有线及无线电子通信。举例来说,网络接口285可包含一或多个天线,并且可经配置以使用例如Wi-Fi、蓝牙、WLAN、CDMA等的协议通过一或多个无线网络通信。在一些实施例中,网络接口285与外部数据源通信地耦合。举例来说,网络接口285可通过有线连接与交通工具中的移动数据终端(“MDT”)耦合,或可通过移动宽带网络耦合到远程服务器。在一些实施例中,网络接口285经由虚拟专用网(“VPN”)客户端连接到服务器,所述客户端符合与维持证据的连续性相关的一或多个加密标准。举例来说,VPN客户端可符合联邦信息处理标准(“FIPS”)出版物140-2(FIPS PUB 140-2)。因此,基站控制器275可分别用系绳215及网络接口285与UAV 210及外部数据源两者安全地通信。
基站控制器275经配置以例如结合UAV控制器230或独立地控制UAV 210。举例来说,基站控制器275可经配置以控制推进系统225及传感器阵列235中的一者,而UAV控制器230控制推进系统225及传感器阵列235中的另一者。基站控制器275经配置以从传感器阵列235接收传感器数据。在一些实施例中,基站控制器275经配置以实时地向外部数据源传输传感器数据。在一些实施例中,基站控制器275经配置以将传感器数据存储在基站控制器275的一或多个电子存储器中。在另外实施例中,基站控制器275经配置以实时传输传感器数据的第一部分,同时将第二部分存储在基站控制器275的又一个电子存储器中。因此,基站控制器275可经配置用于记录冗余(例如,当第一部分及第二部分包括大体上类似传感器数据时)或减少的带宽要求(例如,当传感器数据的第一部分小于传感器数据的第二部分时)。
基站控制器275进一步经配置以从外部数据源接收数据。在一些实施例中,基站控制器275经配置以至少部分基于来自外部数据源的数据来控制UAV 210。举例来说,基站控制器275可响应于接收事件通知信号(例如,交通工具的操作状态)或来自电子装置(例如,交通工具内或基站上的按钮或与交通工具的用户相关联的便携式电子装置)的请求,将UAV210从对接配置转变为空中配置。举例来说,在一些实施例中,响应于接收到指示武器靠近UAV 210的事件通知信号,例如与锚交通工具相关联的用户的手枪已从智能手枪皮套取出,将UAV 210从对接配置转变到空中配置。此外,在一些实施例中,UAV 210的位置及/或飞行模式可从电子装置进行控制,所述电子装置例如锚交通工具内的操纵杆或触摸屏,或与锚交通工具的用户相关联的便携式电子装置。
操作状态可包含交通工具的任何各种操作状态,例如传动系的操作状态(例如,驻车、空档、行驶等)、电系统的操作状态(例如,关闭、从动或驱动)或交通工具的任何其它操作状态。举例来说,基站控制器275可经配置以响应于交通工具操作状态从“行驶”改变为“驻车”,在对接配置与空中配置之间转变UAV 210。作为额外实例,基站控制器275可经配置以响应于交通工具操作状态从“从动”改变为“关闭”而在空中配置之间转变UAV 210。此外,交通工具的操作状态可包含各种转向及牵引辅助系统的激活或去激活,例如响应于积极制动、转弯或失去牵引力。举例来说,操作状态可包含突然停止或检测到涉及锚交通工具的事故。
在一些实施例中,基站控制器275经配置以至少部分基于从传感器阵列235接收的传感器数据来控制UAV 210。举例来说,基站控制器275可基于来自传感器阵列235的一或多个传感器的指示不利环境条件的数据,将UAV 210从空中配置转变为对接配置。
图3说明无人驾驶飞行系统300(也称为监视系统)的特定实施例。无人驾驶飞行系统300包含基站或监视平台302、遥感器平台或UAV 304以及UAV 304与基站302之间的系绳306。UAV 304包含UAV壳体308,例如轻质铝、玻璃纤维、聚合物或碳纤维壳。UAV 304进一步包含推进系统310、UAV控制器312、输入/输出(“I/O”)接口314及耦合到UAV壳体308的电力/数据接口316。推进系统310、UAV控制器312及I/O接口314经由电子链路318电子地耦合到电力/数据接口316。另外,UAV控制器312经由电子链路318电子地耦合到推进系统310及I/O接口314。因此,电力及/或数据可直接从电力/数据接口316向推进系统310、I/O接口314及UAV控制器312中的一或多者直接供应,或可由UAV控制器312介导。举例来说,经由以太网上供应的电力(“POE”)可在电力/数据接口316处接收并供应到UAV控制器312。在一些实施例中,包含一或多个电子存储器320、及一或多个处理器或嵌入式电路系统322及类似者的UAV控制器312接收POE,分离所供应电力及所传达数据,基于推进系统310及I/O接口314的所需电压或电流来调适所供应电力,并向推进系统310及I/O接口314提供电力及数据。
在一些实施例中,UAV控制器312从I/O接口314的一或多个传感器324或相机326接收传感器数据,并将传感器数据传达到电力/数据接口316。在其它实施例中,I/O接口314将来自一或多个传感器324或相机326的传感器数据直接传达到电力/数据接口316。在其它实施例中,来自第一多个传感器324及相机326的传感器数据可从I/O接口314传输到UAV控制器312,且来自第二多个传感器324及相机326的传感器数据从I/O接口314传输到电力/数据接口316。举例来说,在I/O接口314包含加速度计及一或多个相机的情况下,加速度计数据可被传达到UAV控制器312,而来自一或多个相机的图像数据被传达到电力/数据接口316。作为另外实例,可将图像数据传达到UAV控制器312及电力/数据接口316两者。因此,系统的计算需求可根据需要在UAV控制器312的处理器或嵌入式电路系统322与系统的其它控制器之间分配或按比例调整。
在一些实施例中,I/O接口314包含围绕UAV壳体308的底面周向安置的多个相机326。在一些实施例中,I/O接口314包含针对不同的环境光条件、距离、分辨率、帧速率、视野等以不同方式进行配置的相机326。在一些实施例中,I/O接口314进一步包含至少一个传感器324,其经配置用于检测UAV与基站302之间的相对定向。在一些实施例中,可用一或多个磁强计、加速度计、GPS传感器及类似者来感测相对定向。在其它实施例中,可用一或多个相机326感测相对定向。举例来说,各种图像及视频分析技术可应用于来自多个相机326的图像数据,以感测或确定UAV 304与基站302之间的相对定向。此外,在一些实施例中,可基于UAV 304的相对定向或UAV 304与基站302之间的相对定向来控制相机326中的一或多者。
此外,在一些实施例中,至少一个相机326经控制以跟踪对象或人。类似地,UAV304可经控制以跟踪对象或人。因此,可改进证据收集、存储及传输。
在一些实施例中,I/O接口314包含一或多个视觉指示器336。在一些实施例中,视觉指示器336可为可见光、红外或紫外LED。在一些实施例中,视觉指示器336经配置以从UAV控制器312、电力/数据接口316或其组合接收控制信号。视觉指示器336经配置用于指示UAV、基站、交通工具或其组合的一或多个状态。在一些实施例中,视觉指示器336进一步经配置以提供照明,例如交通工具及基站周围的区域,或在相机326中的一者的视野中的对象。
在一些实施例中,I/O接口314包含超声波传感器、温度传感器、空速传感器、气压传感器及定向传感器324中的一或多者。在另外实施例中,至少部分基于从I/O接口314接收的数据信号来控制推进系统310。举例来说,响应于用一或多个传感器324检测到的不利环境条件,可在空中配置到对接配置之间转变UAV 304。
推进系统310包含至少一个螺旋桨328及电动机控制单元(“MCU”)330。MCU 330包含至少一个电动机332及相关联电力转换电路系统334,例如以变换、逆变或整流所接收电力。MCU 330从电力/数据接口316、UAV控制器312或其组合接收电力及控制信号。MCU 330在电力转换电路系统334处接收电力及控制信号,并向电动机332提供电力以控制螺旋桨328的推力矢量。因此,推进系统310因此经配置以为UAV 304提供持续或不定的飞行,举例来说,根据需要提供静态或动态飞行。在一些实施例中,基于UAV 304与基站302之间的相对定向来控制推进系统310。举例来说,推进系统310可经控制以维持UAV 304相对于基站302的静态位置或遵循相对于基站302的一或多个路径。
除电子链路318之外,电力/数据接口316还经由系绳306可通信地耦合到基站302。在所说明实施例中,系绳306包含有线连接306A,其经配置以在基站302与UAV 304之间传输POE。在一些实施例中,系绳306可包含离散有线电力及数据连接306A。在一些实施例中,系绳306包含保护鞘套306B。在一些实施例中,系绳306套有热塑性护套(例如,聚氯乙烯(PVC))。替代地,或另外,保护鞘套306B柔性地及机械地将UAV壳体308耦合到交通工具基本壳体338,例如在UAV壳体308上的一对相应耦合机构与交通工具基本壳体338之间。因此,系绳306上的各种应力由保护鞘套306B分布,而不是传递到有线连接306A。在一些实施例中,系绳306与UAV 304的质心轴向对准。举例来说,在UAV 304在旋转下对称的情况下,系绳306可经配置以沿中心轴线附接到UAV 304的底部。因此,可减小螺旋桨328围绕系绳306的附接点产生的扭矩。在一些实施例中,系绳306直接连接到交通工具基本壳体338。在其它实施例中,系绳306耦合到线轴340,线轴340耦合到交通工具基本壳体338。
交通工具基本壳体338经配置用于安装到交通工具(例如,图1的交通工具120),并且由弹性材料制成,例如铝、玻璃纤维、聚合物或碳纤维壳。交通工具基本壳体338进一步包含电力/数据接口342、耦合到线轴340的MCU 348、盖系统344以及耦合到电力/数据接口342及MCU 348的基站控制器346。基站控制器346进一步耦合到DC/DC电路系统350、网络接口352及盖系统344。电力/数据接口342大体上类似于UAV 304的电力/数据接口316,并且耦合到系绳306的有线连接306A。在所说明实施例中,电力/数据接口342在线轴340处耦合到有线连接306A。因此,电力及数据(例如,POE)可在基站302的电力/数据接口342与UAV 304的电力/数据接口316之间经由系绳306进行传达。线轴340进一步耦合到MCU 348,且借此经配置用于系绳306的调整。
MCU 348包含电动机354、相关联电力转换电路系统356及例如电子制动器的张紧装置358。替代地,电动机354可经配置以张紧装置358。因此,MCU 348根据需要控制电动机354以伸展或缩回系绳306。举例来说,MCU 348可控制UAV 304在空中配置中的高度。另外,MCU 348经配置以控制电动机354及张紧装置358向系绳306的保护鞘套施加力。举例来说,MCU 348及线轴340可经配置以在大风中进行电子制动,或收回损坏的UAV 304。因此,UAV304的部署、飞行及回收得到改进。尽管已经描述及说明线轴、电动机及电子制动,但可根据需要使用任何合适张紧或系绳调整机构。
基站控制器346经由电子链路360耦合到基站302的各种组件。控制器从DC/DC电路系统350接收电力。在所说明实施例中,DC/DC电路系统350耦合到安装基站302的交通工具的电系统,以及基于基站302及/或UAV 304的一或多个组件的电压/电流要求来调适从交通工具接收的电力。在一些实施例中,DC/DC电路系统350进一步包含一或多个能量存储装置,例如锂离子电池。
盖系统344从DC/DC电路系统350接收电力,并且经配置以打开及关闭壳体的盖362,例如盖或分段门。盖系统344包含盖致动器364,其经配置用于打开及/或关闭壳体盖362。当UAV 304与基站302对接时,壳体盖362经配置以围封基站302、系绳306及UAV 304。当UAV 304处于空中配置时,壳体盖362经配置以最小化对UAV 304或系绳306的移动的干扰。在一些实施例中,盖致动器364包含一或多个电动机、弹性构件、闩锁或配置用于打开盖、关闭盖或将盖维持在打开或关闭位置的其它装置。盖系统344的致动由基站控制器346控制。因此,UAV 304安全地保留在交通工具基本壳体338内;例如当交通工具处在运动中时。
基站控制器346包含至少一个电子处理器366及至少一个电子存储器368,其经配置用于存储可由处理器366执行以执行本文所描述的功能性的程序指令。基站控制器346进一步耦合到网络接口352。网络接口352经配置用于有线及无线电子通信。举例来说,网络接口352可包含一或多个天线,并且可经配置以使用例如Wi-Fi、蓝牙、WLAN、CDMA等的协议通过一或多个无线网络通信。在一些实施例中,网络接口352与外部数据源通信地耦合。举例来说,网络接口352可通过有线连接与交通工具中的移动数据终端(“MDT”)耦合,或可通过移动宽带网络耦合到远程服务器。在一些实施例中,网络接口352经由虚拟专用网(“VPN”)客户端连接到服务器,所述客户端符合与维持证据的连续性相关的一或多个加密标准。举例来说,VPN客户端可符合联邦信息处理标准(“FIPS”)出版物-2(FIPS PUB-2)。因此,基站控制器346可分别用系绳306及网络接口352与UAV 304及外部数据源两者安全地通信。
基站控制器346经配置以例如结合UAV控制器312或独立地控制UAV 304。举例来说,基站控制器346可经配置以控制推进系统310及I/O接口314中的一者,而UAV控制器312控制推进系统310及I/O接口314中的另一者。基站控制器346经配置以从I/O接口314接收传感器数据。在一些实施例中,基站控制器346经配置以实时地向外部数据源传输传感器数据。举例来说,基站控制器345可与用于第一响应器的专用通道(例如,第一响应器网络授权、FirstNet)通信地耦合,并且实时地向FirstNet传输传感器数据。在一些实施例中,基站控制器346经配置以将传感器数据存储在基站控制器346的一或多个电子存储器368及/或UAV的电子存储器320中。在另外实施例中,基站控制器346经配置以实时传输传感器数据的第一部分,同时将第二部分存储在又一个电子存储器368中。因此,基站控制器346可经配置用于记录冗余(例如,当第一部分及第二部分包括大体上类似传感器数据时)或减少的带宽要求(例如,当传感器数据的第一部分小于传感器数据的第二部分时)。
在一些实施例中,基站控制器346经配置以响应于检测到预定无线信号而传输传感器数据。在一些实施例中,可从便携式电子装置或从安全同步点(例如,警察局或消防站的无线网络)检测预定无线信号。因此,预定无线信号可由网络接口352检测。随后,基站控制器346例如将传感器数据传输到远程证据存储库或其它外部数据源用于安全存储。
基站控制器346进一步经配置以从外部数据源接收数据。在一些实施例中,基站控制器346经配置以至少部分基于来自外部数据源的数据来控制UAV 304。举例来说,基站控制器346可响应于接收事件通知信号(例如,交通工具的操作状态)或来自与交通工具的用户相关联的便携式电子装置的请求,将UAV 304从对接配置转变为空中配置。操作状态可包含交通工具的任何各种操作状态,例如传动系的操作状态(例如,驻车、空档、行驶等)、电系统的操作状态(例如,关闭、从动或驱动)或交通工具的任何其它操作状态。举例来说,基站控制器346可经配置以响应于交通工具操作状态从“行驶”改变为“驻车”,在对接配置与空中配置之间转变UAV 304。作为额外实例,基站控制器346可经配置以响应于交通工具操作状态从“从动”改变为“关闭”而在空中配置之间转变UAV304。举例来说,交通工具的用户可例如用便携式电子装置请求UAV 304在对接位置与空中配置之间转变位置。替代地,或另外,来自外部数据源的数据可用以控制UAV 304的飞行模式或相对定向。在一些实施例中,基站控制器346经配置以至少部分基于从I/O接口314接收的传感器数据来控制UAV 304。举例来说,基站控制器346可基于来自I/O接口314的一或多个传感器的指示不利环境条件的数据,将UAV 304从空中配置转变为对接配置。
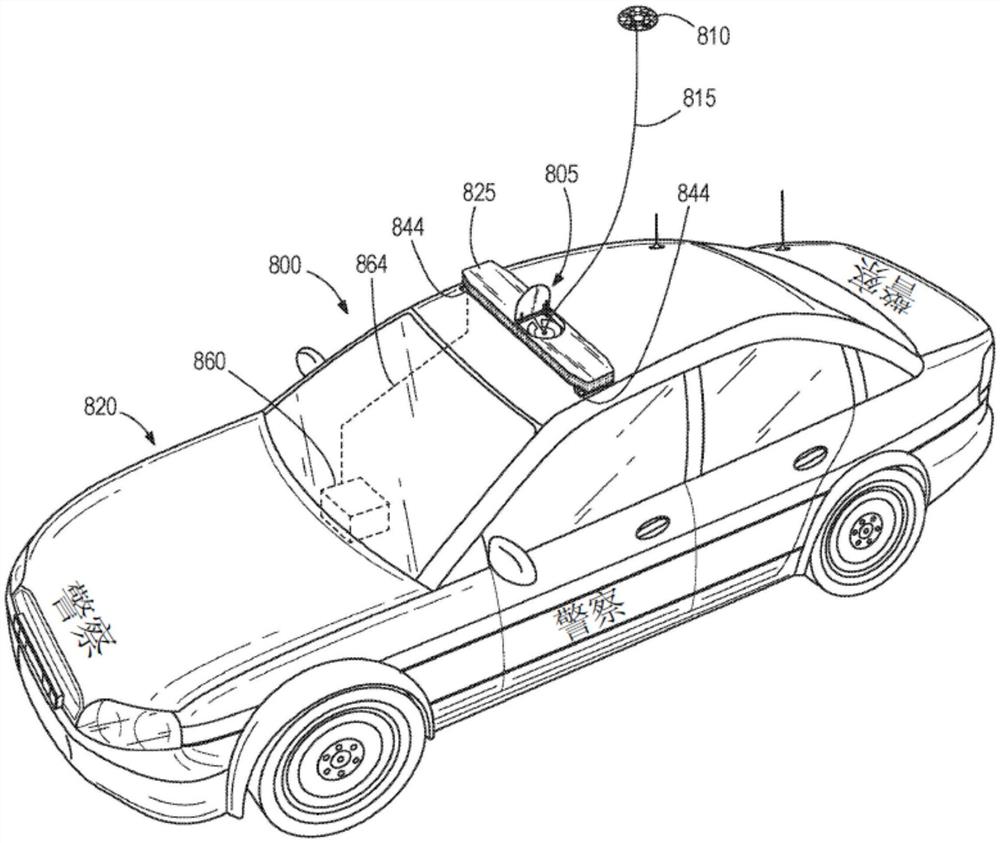
图4说明根据另一实施例的空中系统800。空中系统800包含基站805、无人驾驶飞行器(“UAV”)810(参见图5)及在基站805与UAV 810之间伸展的系绳815(参见图5)。基站805安装在锚交通工具820上。本文中描述及说明的关于空中系统100、200及300的所有属性及特征用或可用空中系统800来实施,并且特此补充。
在第一实施例中,基站805集成到灯条825中。还参考图6及7,灯条825包含灯条主体828,其具有顶部或上表面832及外围836,多个光源840通过外围836经配置以按已知方式提供照明。灯条主体828经由一或多个支持件844支撑到交通工具820的顶848,交通工具820可为例如本文所描述的交通工具120或其变体,并且在一些实施例中可为商用交通工具。灯条825经由一或多个电子链路864与锚交通工具控制器860电耦合,并且经配置以从锚交通工具控制器860接收电力及数据。
在一些实施例中,UAV 810可包含粘附到UAV 810的一或多个灯,其可呈单个LED光源的形式,或可呈灯条形式的多个LED的形式(未展示)。灯可独立地操作或经配置用于与灯条825同时操作,并且在一些实施例中,可例如通过使灯颜色及时序与灯条825同步来模拟灯条825的照明。在其它实施例中,UAV 810可包含灯(未展示),例如泛光灯,其可经定向以照明UAV 810在其上行进的特定位置。可控制此类灯以与位于UAV 810上的相机协作,尽管在其它实施例中具有灯的UAV 810可能没有相机。在又其它实施例中,UAV 810可包含其它类型的应急灯或信令灯,例如交通灯功能,在一些情况下通过具有与本地交通控制网络的控制器接口或与具有类似用途的其它UAV协调的控制器接口。另外实施例可包含模块化灯,使得可在现场为UAV 810配备适合于操作者在部署UAV 810之前遇到的情形的灯阵列。
图5说明空中配置中的UAV 810的空中系统800。系绳815在基站805与UAV 810之间伸展,并将UAV 810固定到基站805,以及将电力从基站805传达到UAV 810,例如用于UAV810的推进系统。系绳815进一步经配置以在基站805与UAV 810之间传输数据信号,全部都如本文所描述。因此,UAV 810的部署、飞行及回收可由基站805以先前描述的方式来控制。
当不在飞行中时,UAV 810对接并隐藏在基站805内。再次参考图6及7,基站805完全集成到灯条825中,使得当UAV 810被固定在灯条825中时,灯条825的轮廓保持不变,从而导致在美观性、空气阻力或其它特性上没有明显的变化(即,在占据面积或轮廓上无改变)。
基站805包含空腔874(其可被分隔,或可不被分隔)以及操作盖子、舱口或盖880。盖880经定大小及成形以允许UAV 810的进出。盖880在一端处通过一对铰链884无源地固定到基站805,并且有源地固定到基站805,并且可通过致动器888关于基站805移动,致动器888可呈例如电致动螺线管或气缸的形式。
空腔874在主体828内伸展并且不受盖880的形状或大小的限制。参考图7,基站805的剖视图说明对接的UAV 810(定位在垫上,未展示)及系绳伸展及缩回机构,其可呈卷轴、绕线器或线轴890的形式。系绳815缠绕线轴890,线轴890可操作地耦合到电动机894。系绳815从线轴890选路到垫及UAV 810,待关于以下实施例进一步描述及展示。
图8说明根据第一实施例的空中系统900。空中系统900包含基站905、无人驾驶飞行器(“UAV”)910(参见图9)及在基站905与UAV 910之间伸展的系绳915(参见图9)。基站905安装在锚交通工具920上。本文中描述及说明的关于空中系统100、200、300及800的所有属性及特征用或可用空中系统900来实施,并且特此补充。
在此实施例中,基站905不是集成到灯条925中或集成在灯条925内,而是形成在灯条925中、与灯条925一起形成或形成为灯条925的部分。还参考图10,灯条包含灯条主体928,其具有顶部或上表面932及外围936,多个光源940从外围936经配置以按已知方式提供照明。灯条925经由一或多个电子链路964与锚交通工具控制器960电耦合。
壳体部分968通常关于灯条925居中定位。壳体部分968可与灯条925一起形成,在此情况下,可认为壳体部分968与灯条925一体形成。替代地,灯条925可形成有凹槽或插座以接纳用于附接到其的壳体部分968。壳体部分968的形状说明不是限制性的,并且本文考虑其它形状。在任一实施例中,链路964或单独电子链路969可从壳体部分968提供及/或接收电力及数据。因此,UAV 910的部署、飞行及回收可由基站905以先前描述的方式控制。
壳体部分968包含空腔970(其可被分隔或可不被分隔)及操作盖980。盖980经定大小及成形以允许UAV 910的进出。盖980在一端处通过一对铰链984被动地固定到基站壳体部分968,并且主动地固定到壳体部分968,并且可通过致动器988关于壳体部分968移动,致动器988可为例如电致动螺线管或气缸的形式。
参考图11及12,壳体部分968包含操作地耦合到电动机994的线轴990及基座或垫1000,其都定位在空腔970内。垫1000经形成以在其上接纳及支撑UAV 910,并且具有与垫1000的轮廓大体上同心的导向件1008。导向件1008包含与中央孔1016连通的开口或槽口1012。参考图13,导向件1008相对于线轴990配置,使得系绳915从线轴990伸展并穿过槽口1012并离开中央孔1016用于与UAV 910耦合。
参考图14,空中系统1200包含基站1205、无人驾驶飞行器(“UAV”)1210(图15)及在基站1205与UAV 1210之间伸展的系绳1215(图15)。基站1205安装在锚交通工具1220上。本文中描述及说明的关于空中系统100、200、300、800及900的所有属性及特征用或可用空中系统1200来实施,并且特此补充。
在此实施例中,基站1205附接到灯条1225,而不是形成在灯条1225中、与灯条1225一起形成或形成为灯条1225的部分。基站1205可通过使用一或多个支架1240粘附到灯条1225。替代地,可使用其它形式的紧固件。基站1205可定位在灯条1225上的任何位置,或在其它实施例中可定位在交通工具顶1248上并粘附到交通工具顶1248,无论是否靠近灯条1225。由于基站1205与灯条1225之间的任何潜在分离,基站1205可在必要时包含通过其的开口以允许与类似于链路964、969的电子链路中的任何者连接,使得电力及数据连接性可直接来自交通工具1220(通过主体或邻近主体面板中的导管或其它通道),或其可代替地通过或作为从交通工具1220到灯条1225的连接性的部分(例如,基站1205可经由到灯条1225的现有电力及/或数据连接电耦合(即,“菊花链”)到锚交通工具控制器(例如,控制器960)。在又其它实施例中,基站1205可包含如本文所描述的单独电源及电子器件。因此,基站1205可被安装为现有紧急交通工具的改装。
基站1205在其它方面类似于图10到13的壳体部分968。因此,UAV 1210的部署、飞行及回收可由基站1205控制。
在操作中,交通工具操作者可选择从锚交通工具820内部署UAV。在由操作者启动后(例如,经由可从交通工具驾驶员位置接近的按钮),通过控制器860、960,致动器888、988、1288接合以自动将盖880、980、1280从关闭位置移动到打开位置。一旦打开,UAV 810、910、1210就可用于操作且可如本文所描述那样进行控制。一旦操作完成并且线轴(990)将UAV 810、910、1210缩回到基站805、905、1205内的位置,致动器888、988、1288再次接合以将盖880、980、1280从打开位置移动到关闭位置,从而有效地保护UAV 810、910、1210使其免受外部环境的影响。上述操作的控制可完全从交通工具820、920、1220内或从远离交通工具820、920、1220的位置发生。
在一些实施例中,基站805、905、1205可包含本地致动组件,以允许直接在灯条825、925、1225自身处进行手动操作(即,按钮或其它可调整控制旋钮、开关等)。在一些实施例中,基站805、905、1205自身可包含一或多个传感器,以提供关于可能对UAV810、910、1210的操作产生不利影响的当地环境条件的信息。举例来说,基站805、905、1205可包含用于感测风速的传感器,使得控制器860、960在当地空气速度高于预定或阈值量时防止盖880、980、1280打开,并且向操作者提供关于此类条件的警告。
因此,本发明尤其提供一种包含基站、UAV及在基站与UAV之间伸展的系绳的无人驾驶飞行系统。在所附权利要求书中阐述本发明的各种特征及优点。
- 栓系监视无人机的基于交通工具的部署
- 系留无人机及基于系留无人机的灭火系统