一种手术机械臂的刚度调控方法及手术机械臂
文献发布时间:2023-06-19 11:11:32
技术领域
本发明涉及医疗器械技术领域,特别涉及一种手术机械臂的刚度调控方法及手术机械臂。
背景技术
微创手术经历着由腹腔镜手术到单孔手术再到经自然腔道内窥镜手术的术式革新,经自然腔道内窥镜手术是将内窥镜手术机械臂沿着人体的自然腔道(如食道和支气管等)送入人体内部,当其末端到达病灶处时,再将末端手术操作器(如分离钳、抓钳、持针器、剪刀等等)沿内窥镜手术机械臂的内腔通道送达其末端并固定于末端以执行相关手术操作。但是限制经自然腔道内窥镜手术广泛应用最主要的一点就是手术工具,如内窥镜手术机械臂。在将内窥镜手术机械臂沿人体自然腔道送入体内的过程中,需要其具有一定的柔性以适应人体自然腔道的复杂形状;而在搭载于其末端的末端手术操作器执行相关手术操作时,则需要其具有一定的刚性以为末端提供一个稳固的操作平台,以对其进行精确的操作控制。因此,内窥镜手术机械臂存在着刚、柔矛盾。
现有技术中的内窥镜手术机械臂相对于人体自然腔道刚度较大,在沿着自然腔道进入人体内部时不能很好的适应人体自然腔道;而在实施相关手术操作时,其刚度不足以为末端手术操作器提供一个稳固的平台,因而末端手术操作器的控制精度难以得到保证。
因而现有技术还有待改进和提高。
发明内容
鉴于上述现有技术的不足之处,本发明的目的在于提供一种手术机械臂的刚度调控方法及手术机械臂,旨在解决现有技术中的内窥镜手术机械臂轴向刚度不可调节的问题。
为了达到上述目的,本发明采取了以下技术方案:
本发明实施例提供了一种手术机械臂,其中,包括:第一相变管、第二相变管、第一导水管、第二导水管、前端卡盘、肩部卡盘、肘部第一卡盘、肘部第二卡盘、腕部卡盘、后端卡盘、中心支柱、肩部控制线、腕部控制线以及外包覆层;
所述第一相变管的一端和所述第二相变管的一端均设置在所述前端卡盘内,所述第一相变管的一端和所述第二相变管的一端的端面与前端卡盘的端面平齐设置,所述第一相变管的另一端和所述第二相变管的另一端依次穿过所述肩部卡盘、肘部第一卡盘、肘部第二卡盘和腕部卡盘设置在所述后端卡盘内;
所述第一导水管的第一端和第二导水管的第一端分别外伸出前端卡盘;所述第一导水管的外圆柱面与所述第一相变管的内圆柱面相贴合、所述第二导水管的外圆柱面与所述第二相变管的内圆柱面相贴合,所述第一导水管和第二导水管用于注入热水并将热量传导至第一相变管和第二相变管,使得第一相变管和第二相变管的温度升高和所述第一导水管、第二导水管还用于注入冷水并将第一相变管和第二相变管中的热量吸收,使得第一相变管和第二相变管的温度降低;
所述后端卡盘内开设有液体回流通道,所述液体回流通道连通于所述第一导水管的第二端和第二导水管的第二端;
所述中心支柱位于所述第一相变管和第二相变管之间,且所述中心支柱的一端的端面与前端卡盘的端面平齐设置、另一端依次穿过所述肩部卡盘、肘部第一卡盘、肘部第二卡盘和腕部卡盘并与所述后端卡盘连接;所述外包覆层包覆于所述前端卡盘、肩部卡盘、肘部第一卡盘、肘部第二卡盘、腕部卡盘以及后端卡盘的外圆柱面;
所述肩部控制线的一端外伸出所述前端卡盘、另一端穿过所述肩部卡盘并与所述肘部第一卡盘连接;所述腕部控制线的一端外伸出所述前端卡盘、另一端依次穿过所述肩部卡盘、肘部第一卡盘、肘部第二卡盘和腕部卡盘并与所述后端卡盘连接。
进一步地,所述手术机械臂中,所述后端卡盘上设有:第一中心支柱孔、第一末端手术操作器孔、第一腕部控制线孔、第一相变管孔、第二相变管孔、液体回流通道入口以及液体回流通道出口;
所述第一中心支柱孔与所述后端卡盘同心布置,所述第一末端手术操作器孔对称分布于所述第一中心支柱孔的两侧,所述第一相变管孔和第二相变管孔相对于所述第一中心支柱孔对称分布、且位于所述第一末端手术操作器孔的侧面,所述第一腕部控制线孔相对于所述第一中心支柱孔对称分布、且位于相邻的第一末端手术操作器孔和第一相变管孔之间和相邻的第一末端手术操作器孔和第二相变管孔之间;所述液体回流通道入口和液体回流通道出口位于后端卡盘内部、且连通于所述液体回流通道,所述液体回流通道入口与第一相变管孔相连通,所述液体回流通道出口与所述第二相变管孔相连通。
进一步地,所述手术机械臂中,所述前端卡盘上设有:第二中心支柱孔、第二末端手术操作器孔、第一肩部控制线孔、第三相变管孔以及第二腕部控制线孔;
所述第二中心支柱孔与所述前端卡盘同心布置,所述第二末端手术操作器孔、第一肩部控制线孔、第三相变管孔和第二腕部控制线孔均对称分布于所述第二中心支柱孔的外侧,所述第二腕部控制线孔位于所述第二中心支柱孔和所述第三相变管孔之间,所述第一肩部控制线孔位于相邻的第二末端手术操作器孔和第三相变管孔之间。
进一步地,所述手术机械臂中,所述肩部卡盘上设有:第三中心支柱孔、第三末端手术操作器孔、第二肩部控制线孔、第四相变管孔以及第三腕部控制线孔;
所述第三中心支柱孔与所述肩部卡盘同心布置,所述第三末端手术操作器孔、第二肩部控制线孔、第四相变管孔和第三腕部控制线孔均对称分布于所述第三中心支柱孔的外侧,所述第三腕部控制线孔位于所述第三中心支柱孔和所述第四相变管孔之间,所述第二肩部控制线孔位于相邻的第三末端手术操作器孔和第四相变管孔之间。
进一步地,所述手术机械臂中,所述肘部第一卡盘上设有:第四中心支柱孔、第四末端手术操作器孔、第三肩部控制线孔、第五相变管孔以及第四腕部控制线孔;
所述第四中心支柱孔与所述肘部第一卡盘同心布置,所述第四末端手术操作器孔、第三肩部控制线孔、第五相变管孔和第四腕部控制线孔均对称分布于所述第四中心支柱孔的外侧,所述第四腕部控制线孔位于所述第四中心支柱孔和所述第五相变管孔之间,所述第三肩部控制线孔位于相邻的第四末端手术操作器孔和第五相变管孔之间。
进一步地,所述手术机械臂中,所述肘部第二卡盘上设有:第五中心支柱孔、第五末端手术操作器孔、第五腕部控制线孔以及第六相变管孔;
所述第五中心支柱孔与所述肘部第二卡盘同心布置,所述第五末端手术操作器孔、第六相变管孔和第五腕部控制线孔均对称分布于所述第六中心支柱孔的外侧,所述第五腕部控制线孔位于相邻的第五末端手术操作器孔和第六相变管孔之间。
进一步地,所述手术机械臂中,所述腕部卡盘上设有:第六中心支柱孔、第六末端手术操作器孔、第六腕部控制线孔以及第七相变管孔;
所述第六中心支柱孔与所述腕部卡盘同心布置,所述第六末端手术操作器孔、第七相变管孔和第六腕部控制线孔均对称分布于所述第六中心支柱孔的外侧,所述第六腕部控制线孔位于相邻的第六末端手术操作器孔和第七相变管孔之间。
进一步地,所述手术机械臂中,所述外包覆层包括:外包覆层外壁、外包覆层内壁和相变微胶囊层;所述外包覆层内壁包覆于所述前端卡盘、肩部卡盘、肘部第一卡盘、肘部第二卡盘、腕部卡盘以及后端卡盘的外圆柱面,所述相变微胶囊层覆盖设置在所述外包覆层内壁的外侧面,所述外包覆层外壁覆盖设置在所述相变微胶囊层的外侧面。
进一步地,所述手术机械臂中,所述第一相变管和第二相变管的材质为热塑性塑料。
一种手术机械臂的刚度调控方法,其中,应用于上述手术机械臂,包括:
在第一导水管和第二导水管内注入温度高于制成所述第一相变管和第二相变管的热塑性塑料的玻璃转化温度、且低于其熔点的水,制成所述第一相变管和第二相变管的热塑性塑料由玻璃态转变为高弹态,此时所述第一相变管和第二相变管质地变软,以使所述第一相变管和第二相变管具有较小的轴向刚度;
在第一导水管和第二导水管内注入温度低于制成所述第一相变管和第二相变管的热塑性塑料的玻璃转化温度的水,制成所述第一相变管和第二相变管的热塑性塑料由高弹态转变为玻璃态,此时所述第一相变管和第二相变管质地变硬,以使所述第一相变管和第二相变管具有较大的轴向刚度。
本发明所采用的技术方案具有以下有益效果:
本发明所提供的手术机械臂,包括:第一相变管、第二相变管、第一导水管、第二导水管、前端卡盘、肩部卡盘、肘部第一卡盘、肘部第二卡盘、腕部卡盘、后端卡盘、中心支柱、肩部控制线、腕部控制线以及外包覆层;所述第一相变管的一端和所述第二相变管的一端均设置在所述前端卡盘内,所述第一相变管的一端和所述第二相变管的一端的端面与前端卡盘的端面平齐设置,所述第一相变管的另一端和所述第二相变管的另一端依次穿过所述肩部卡盘、肘部第一卡盘、肘部第二卡盘和腕部卡盘设置在所述后端卡盘内;所述第一导水管的第一端和第二导水管的第一端分别外伸出前端卡盘;所述第一导水管的外圆柱面与所述第一相变管的内圆柱面相贴合、所述第二导水管的外圆柱面与所述第二相变管的内圆柱面相贴合,所述第一导水管和第二导水管用于注入热水并将热量传导至第一相变管和第二相变管,使得第一相变管和第二相变管的温度升高和所述第一导水管、第二导水管还用于注入冷水并将第一相变管和第二相变管中的热量吸收,使得第一相变管和第二相变管的温度降低;所述后端卡盘内开设有液体回流通道,所述液体回流通道连通于所述第一导水管的第二端和第二导水管的第二端;所述中心支柱位于所述第一相变管和第二相变管之间,且所述中心支柱的一端的端面与前端卡盘的端面平齐设置、另一端依次穿过所述肩部卡盘、肘部第一卡盘、肘部第二卡盘和腕部卡盘并与所述后端卡盘连接;所述外包覆层包覆于所述前端卡盘、肩部卡盘、肘部第一卡盘、肘部第二卡盘、腕部卡盘以及后端卡盘的外圆柱面;所述肩部控制线的一端外伸出所述前端卡盘、另一端穿过所述肩部卡盘并与所述肘部第一卡盘连接;所述腕部控制线的一端外伸出所述前端卡盘、另一端依次穿过所述肩部卡盘、肘部第一卡盘、肘部第二卡盘和腕部卡盘并与所述后端卡盘连接。本发明实施例中的手术机械臂可实现轴向刚度的调整,可很好地适应人体自然腔道,从而保证手术的安全性。
附图说明
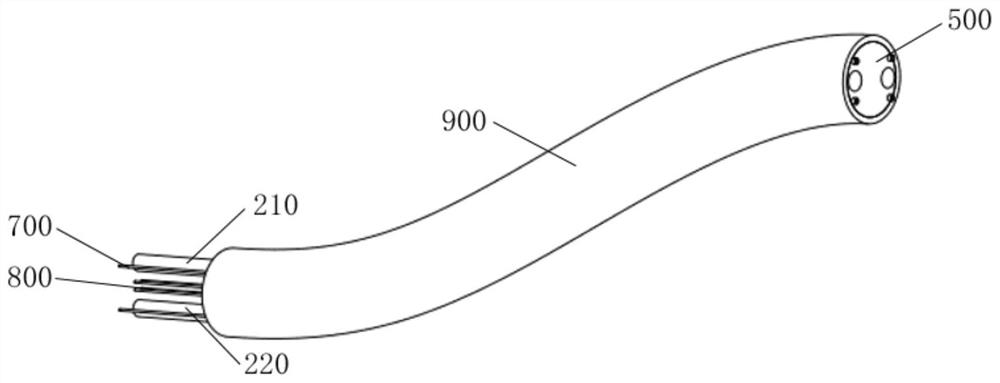
图1为本发明提供的一种手术机械臂的外部结构示意图;
图2为本发明提供的一种手术机械臂的内部结构示意图;
图3为本发明提供的后端卡盘的主视图;
图4为本发明提供的后端卡盘的结构示意图;
图5为本发明提供的后端卡盘的剖视图;
图6为图2中A处的轴向剖视图;
图7为本发明提供的前端卡盘的结构示意图;
图8为图2中C处的轴向剖视图;
图9为本发明提供的肩部卡盘的结构示意图;
图10为本发明提供的肘部第一卡盘的结构示意图;
图11为本发明提供的肘部第二卡盘的结构示意图;
图12为本发明提供的腕部卡盘的结构示意图;
图13为图2中B处的局部放大图;
图14为本发明提供的手术机械臂腕部姿态控制原理示意图;
图15为本发明提供的外包覆层的结构示意图;
图16为本发明提供的外包覆层的剖视图;
图17为本发明提供的相变微胶囊层的结构示意图;
图18为本发明提供的相变微胶囊颗粒的结构示意图;
图19为本发明提供的一种手术机械臂的第一种工作原理图;
图20为本发明提供的一种手术机械臂的第二种工作原理图;
图21为本发明提供的一种手术机械臂的刚度调控方法的较佳实施例流程图。
图中:110、第一相变管;120、第二相变管;210、第一导水管;220、第二导水管;300、前端卡盘;301、第二中心支柱孔;302、第二末端手术操作器孔;303、第一肩部控制线孔、304、第三相变管孔;305、第二腕部控制线孔;410、肩部卡盘;411、第三中心支柱孔;412、第三末端手术操作器孔;413、第二肩部控制线孔;414、第四相变管孔;415、第三腕部控制线孔;420、肘部第一卡盘;421、第四中心支柱孔;422、第四末端手术操作器孔;423、第三肩部控制线孔;424、第五相变管孔;425、第四腕部控制线孔;430、肘部第二卡盘;431、第五中心支柱孔;432、第五末端手术操作器孔;433、第五腕部控制线孔;434、第六相变管孔;440、腕部卡盘;441、第六中心支柱孔;442、第六末端手术操作器孔;443、第六腕部控制线孔;444、第七相变管孔;500、后端卡盘;501、第一中心支柱孔;502、第一末端手术操作器孔;503、第一腕部控制线孔;504、第一相变管孔;505、第二相变管孔;510、液体回流通道;511、液体回流通道入口;512、液体回流通道出口;600、中心支柱;700、肩部控制线;710、肩部控制线套管;800、腕部控制线;801、腕部第一控制线;802、腕部第二控制线;803、腕部第三控制线;804、腕部第四控制线;810、腕部控制线套管;900、外包覆层;910、外包覆层外壁;920、外包覆层内壁;930、相变微胶囊层;931、相变微胶囊颗粒;932、微胶囊外壳;933、微胶囊内核;940、前端封盖;950、末端封盖;50、热水浴锅;60、蠕动泵;70、蓄水槽;80、制冷器。
具体实施方式
为使本发明的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
在实施方式和申请专利范围中,除非文中对于冠词有特别限定,否则“一”与“所述”可泛指单一个或复数个。
另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
现有的经自然腔道内窥镜手术机械臂轴向变刚度方法有如下几类:
(1)形锁合法:采用高冗余度的腱鞘机构(即丝线驱动方式),手术机械臂为连续体构型。驱动丝线纵向贯穿整个内窥镜手术机械臂,通过增大驱动丝线的张紧力,使得相邻的连续体单元间的摩擦力变大以阻止各个连续体单元间的相互转动,进而改变内窥镜手术机械臂的轴向刚度。该方法的缺点在于:为了达到所需刚度,需要很大的驱动丝线张紧力,造成各个连续体单元间的相互挤压力较大,这就需要较大尺寸的驱动丝线以及较大尺寸的连续体单元。因此,利用形锁合法的刚度可控内窥镜的手术机械臂的外径一般较大,不能很好的适应人体的自然腔道。并且,驱动丝线需要在整个手术过程中都需保持较大的张紧力,这对材料的疲劳强度提出了很高的要求。
(2)颗粒阻塞原理:在密闭的空间内填入细小颗粒物,将密闭空间内的多余空气抽出,使得颗粒物之间相互挤压,挤压产生的相互之间的摩擦力将阻碍颗粒物间的相对运动,进而提高机械臂的整体刚度。这一方法常被用于尺寸较大的机械臂,因为为了提供较大的刚度,需要较多的颗粒物,这将导致机械臂变得笨重,结构紧凑性差。
(3)利用电流变液及磁流变液:电、磁流变液在高电场或高磁场下,其状态会发生从液态到凝胶态再到固态的转变。但是电、磁流变液在转变到固态时,其所能提供的刚度有限。并且如果要将电、磁流变液转变为固态时,一般需要提供5000V以上的高压,手术安全性难以得到保证。
(4)利用温度相变材料:低熔点金属(如镓、铟、锡等)或热塑性塑料(ABS、PET、PLA塑料等)在温度达到其玻璃转化温度时,其质地变软;在温度低于其玻璃转化温度时,其质地变硬。因此,这一原理常被应用于手术机械臂的变刚度方法。首先,常被使用的低熔点金属为有毒物质,手术安全性难以得到保证。而且现有技术常将电阻丝置于手术机械臂内腔,利用电阻丝所产生的电阻热来改变相变材料的温度;且由于电阻丝电流的存在,其冷却方法常采用室温冷却或风冷。这种方法的缺点在于:电阻丝电流的存在,将导致手术安全隐患;而且电阻丝所产生的电阻热不可控,其热量的堆积将使得手术机械臂内腔的温度远高于相变材料的玻璃转化温度进而达到相变材料的熔点,使得相变材料融化;再者,室温冷却或风冷的方式冷却速度较慢,影响手术进程。更加明显的缺点在于:手术机械臂内电阻热会传导至手术机械臂的外表面,导致手术机械臂外表面温度升高,而手术机械臂工作时其外表面与人体自然腔道内壁贴合,因此过高的表面温度将会导致人体自然腔道内壁的灼伤。
本发明公开了一种手术机械臂,请一并参阅图1和图2,图1为本发明提供的一种手术机械臂的外部结构示意图;图2为本发明提供的一种手术机械臂的内部结构示意图。所述手术机械臂包括:第一相变管110、第二相变管120、第一导水管210、第二导水管220、前端卡盘300、肩部卡盘410、肘部第一卡盘420、肘部第二卡盘430、腕部卡盘440、后端卡盘500、中心支柱600、肩部控制线700、腕部控制线800以及外包覆层900。
所述第一相变管110的一端和所述第二相变管120的一端均设置在所述前端卡盘300内,所述第一相变管110的一端所述第二相变管120的一端的端面与前端卡盘300的端面平齐设置,所述第一相变管110的另一端和所述第二相变管120的另一端依次穿过所述肩部卡盘410、肘部第一卡盘420、肘部第二卡盘430和腕部卡盘440设置在所述后端卡盘500内;
所述第一导水管210的第一端和第二导水管220的第一端分别外伸出前端卡盘300;所述第一导水管210的外圆柱面与所述第一相变管110的内圆柱面相贴合、所述第二导水管220的外圆柱面与所述第二相变管120的内圆柱面相贴合,所述第一导水管210和第二导水管220用于注入热水并将热量传导至第一相变管110和第二相变管120,使得第一相变管110和第二相变管120的温度升高和所述第一导水管210、第二导水管220还用于注入冷水并将第一相变管110和第二相变管120中的热量吸收,使得第一相变管110和第二相变管120的温度降低;
所述后端卡盘500内开设有液体回流通道510,所述液体回流通道510连通于所述第一导水管210的第二端和第二导水管220的第二端;
所述中心支柱600位于所述第一相变管110和第二相变管120之间,且所述中心支柱600的一端的端面与前端卡盘300的端面平齐设置、另一端依次穿过所述肩部卡盘410、肘部第一卡盘420、肘部第二卡盘430和腕部卡盘440并与所述后端卡盘500连接;所述外包覆层900包覆于所述前端卡盘300、肩部卡盘410、肘部第一卡盘420、肘部第二卡盘430、腕部卡盘440以及后端卡盘500的外圆柱面;
所述肩部控制线700的一端外伸出所述前端卡盘300、另一端穿过肩部卡盘410并与所述肘部第一卡盘420连接。所述腕部控制线800的一端外伸出所述前端卡盘300、另一端依次穿过肩部卡盘410、肘部第一卡盘420、肘部第二卡盘430和腕部卡盘440并与所述后端卡盘500连接。
在本发明实施例中,所述第一相变管110和第二相变管120为中空管道,外径为4.6mm,内径为3.0mm,壁厚为0.8mm,第一相变管110和第二相变管120所使用的材料为具有生物相容性的热塑性塑料,其材质具体可选用PET塑料(玻璃转化温度:67℃、熔点:80℃)、尼龙6(玻璃转化温度:60℃、熔点:220℃)、尼龙66(玻璃转化温度:65℃、熔点:260℃),以及一些新型热塑性塑料,如英国设计师Peter Marigold于2016年设计出的名为“FORMcard”的淀粉基的生物塑料(玻璃转化温度:65℃、熔点:80℃)。所述第一导水管210和第二导水管220的材质为聚四氟乙烯,为中空圆形管道;外径为3.0mm,内径为2.6mm,壁厚为0.2mm。第一导水管210和第二导水管220的外圆柱面分别与第一相变管110和第二相变管120的内圆柱面相贴合。在常温下,制成第一相变管110和第二相变管120的热塑性塑料处于玻璃态,处于玻璃态的热塑性塑料具有较大的硬度;向第一导水管210和第二导水管220内注入液体,当注入的液体温度高于制成所述第一相变管110和第二相变管120的热塑性塑料的玻璃转化温度且低于该热塑性塑料的熔点时,液体的热量将通过第一导水管210和第二导水管220传导至第一相变管110和第二相变管120,使得制成第一相变管110和第二相变管120的热塑性塑料由玻璃态转变为高弹态,处于高弹态的热塑性塑料具有较小的硬度,使得此时的第一相变管110和第二相变管120质地变软,进而使得所述手术机械臂具有较小的轴向刚度;当注入第一导水管210、第二导水管220的液体温度低于制成所述第一相变管110和第二相变管120的热塑性塑料的玻璃转化温度时,液体将吸收第一导水管210、第二导水管220、第一相变管110以及第二相变管120中的热量,使得制成第一相变管110和第二相变管120的热塑性塑料的温度低于其玻璃转化温度,进而使得热塑性塑料由高弹态转变为玻璃态,此时的第一相变管110和第二相变管120质地变硬,进而使得所述手术机械臂具有较大的轴向刚度。本发明所述手术机械臂可通过改变注入第一导水管210、第二导水管220内液体的温度,来实现所述手术机械臂轴向刚度的调节。
其中,所述中心支柱600为镍钛合金丝,外径为1.0mm,其纵向贯穿整个手术机械臂。中心支柱600用于将所述前端卡盘300、多个肩部卡盘410、肘部第一卡盘420、肘部第二卡盘430、多个腕部卡盘440以及后端卡盘500进行连接。前端卡盘300、多个肩部卡盘410、肘部第一卡盘420、肘部第二卡盘430、多个腕部卡盘440以及后端卡盘500依次排布,相邻端面之间的距离为10mm。镍钛合金丝的拉伸强度很大,因此中心支柱600可用于限制前端卡盘300、多个肩部卡盘410、肘部第一卡盘420、肘部第二卡盘430、多个腕部卡盘440以及后端卡盘500之间的轴向位置;镍钛合金丝的弯曲强度较小,可适应手术机械臂不同形态的弯曲;镍钛合金丝还具有一定的弹性,可在手术后帮助变形的手术机械臂恢复竖直状态。
具体的,所述外包覆层900包覆于前端卡盘300、多个肩部卡盘410、肘部第一卡盘420、肘部第二卡盘430、多个腕部卡盘440以及后端卡盘500的外圆柱面,其内圆柱面与前端卡盘300、多个肩部卡盘410、肘部第一卡盘420、肘部第二卡盘430、多个腕部卡盘440以及后端卡盘500的外圆柱面之间采用粘结剂固定。当向第一导水管210和第二导水管220内注入温度较高的液体时,热量将传递至所述手术机械臂的外表面,而在手术过程中,所述手术机械臂的外表面与人体内的组织直接接触,过高的外表面温度将灼伤人体组织。所述外包覆层900用于隔绝高温液体所产生的温度,保证手术的安全性。
请一并参阅图3至图6,图3为本发明提供的后端卡盘500的主视图;图4为本发明提供的后端卡盘500的结构示意图;图5为本发明提供的后端卡盘500的剖视图;图6为图2中A处的轴向剖视图。所述后端卡盘500为圆柱形,后端卡盘500上设有:第一中心支柱孔501、第一末端手术操作器孔502、第一腕部控制线孔503、第一相变管孔504、第二相变管孔505、液体回流通道510、液体回流通道入口511以及液体回流通道出口512;
所述第一中心支柱孔501与所述后端卡盘500同心布置,所述第一末端手术操作器孔502对称分布于所述第一中心支柱孔501的两侧,所述第一相变管孔504和第二相变管孔505相对于所述第一中心支柱孔501对称分布、且位于所述第一末端手术操作器孔502的侧面,所述第一腕部控制线孔503相对于所述第一中心支柱孔501对称分布、且位于相邻的第一末端手术操作器孔502和第一相变管孔之间504和相邻的第一末端手术操作器孔502和第二相变管孔505之间;所述液体回流通道入口511和液体回流通道出口512位于后端卡盘500内部、且连通于所述液体回流通道510,所述液体回流通道入口511与第一相变管孔504相连通,所述液体回流通道出口512与所述第二相变管孔505相连通。
在本发明实施例中,第一中心支柱孔501为盲孔,直径为1mm,与所述后端卡盘500同心布置,中心支柱600的一端与之配合,通过过盈配合的方式与之固定。第一相变管孔504和第二相变管孔505为沉孔,直径为4.6mm,其圆心与所述后端卡盘500截面圆心之间的距离为3.5mm;第一相变管孔504和第二相变管孔505的内圆柱面分别与第一相变管110和第二相变管120一端的外圆柱面相配合;第一相变管110和第二相变管120的一端与第一相变管孔504和第二相变管孔505采用粘结剂固定,第一导水管210的一端和第二导水管220的一端分别与液体回流通道入口511和液体回流通道出口512连通,液体被注入第一导水管210后,沿第一导水管210流至液体回流通道入口511并进入后端卡盘500内的液体回流通道510,然后通过液体回流通道出口512流入第二导水管220并最终流出所述手术机械臂外,所述液体回流通道510的高度为2mm。
进一步地,四个周向均布的第一腕部控制线孔503为通孔,直径为0.4mm,其圆心与所述后端卡盘500截面圆心之间的距离为5.6mm;腕部控制线800为7乘7股的不锈钢钢丝,直径为0.27mm;四条腕部控制线800的末端穿过第一腕部控制线孔503并打结,腕部控制线800末端打结后使用腕部控制线套管810套合,腕部控制线套管810为热缩管,加热后直径变小可与腕部控制线800的末端打结处进行固定,通过对腕部控制线800的末端进行打结并使用热缩管套合,可使得腕部控制线800的末端直径大于第一腕部控制线孔503的直径,进而使得腕部控制线800在被拉伸的过程中不会脱落。两个第一末端手术操作器孔502为通孔,直径为3.6mm,其圆心与所述后端卡盘500截面圆心之间的距离为4mm,所述手术机械臂的末端到达人体的病灶处后,手术末端操作器可通过第一末端手术操作器孔502探出后端卡盘500并实施相关的手术操作。所述后端卡盘500的高度为6.0mm,外径为12.2mm,最小壁厚为0.3mm,选用316不锈钢材质,可利用精密金属3D打印或激光切割工艺加工。
请一并参阅图7和图8,图7为本发明提供的前端卡盘300的结构示意图;图8为图2中C处的轴向剖视图。所述前端卡盘300为圆柱形,所述前端卡盘300上设有:第二中心支柱孔301、第二末端手术操作器孔302、第一肩部控制线孔303、第三相变管孔304、第二腕部控制线孔305;
所述第二中心支柱孔301与所述前端卡盘300同心布置,所述第二末端手术操作器孔302、第一肩部控制线孔303、第三相变管孔304和第二腕部控制线孔305均对称分布于所述第二中心支柱孔301的外侧,所述第二腕部控制线孔305位于所述第二中心支柱孔301和所述第三相变管孔304之间,所述第一肩部控制线孔303位于相邻的第二末端手术操作器孔302和第三相变管孔304之间。
在本发明实施例中,所述第二中心支柱孔301为通孔,直径为1mm,与所述前端卡盘300同心布置,中心支柱600与第二中心支柱孔301之间采用过盈配合连接,中心支柱600的一端与前端卡盘300的外端面平齐设置。四个周向均布的第一肩部控制线孔303为通孔,直径为0.4mm,其圆心与所述前端卡盘300截面圆心之间的距离为5.6mm;肩部控制线700为7乘7股的不锈钢钢丝,直径为0.27mm,四条肩部控制线700穿过第一肩部控制线孔303。
进一步地,四个周向均布的第二腕部控制线孔305为通孔,直径为0.4mm,其圆心与前端卡盘300截面圆心之间的距离为1mm,四条腕部控制线800穿过第二腕部控制线孔305。两个第三相变管孔304为通孔,直径为4.6mm,其圆心与前端卡盘300截面圆心之间的距离为3.5mm,其内圆柱面分别与第一相变管110和第二相变管120的外圆柱面相配合,采用粘结剂固定,第一相变管110和第二相变管120的一端与前端卡盘300的外端面平齐设置,第一导水管210与第二导水管220分别通过第三相变管孔304外伸出所述手术机械臂。第二末端手术操作器孔302为通孔,直径为3.6mm,其圆心与前端卡盘300截面圆心之间的距离为4mm,所述手术机械臂的末端到达人体内的病灶处后,末端手术操作器通过第二末端手术操作器孔302进入所述手术机械臂内腔。所述前端卡盘300的高度为4.0mm,外径为12.2mm,最小壁厚为0.3mm,选用316不锈钢材质,可利用精密金属3D打印或激光切割工艺加工。
请一并参阅图9至图12,图9为本发明提供的肩部卡盘410的结构示意图;图10为本发明提供的肘部第一卡盘420的结构示意图;图11为本发明提供的肘部第二卡盘430的结构示意图;图12为本发明提供的腕部卡盘440的结构示意图;图13为图2中B处的局部放大图。所述肩部卡盘410为圆柱形,肩部卡盘410上设有:第三中心支柱孔411、第三末端手术操作器孔412、第二肩部控制线孔413、第四相变管孔414、以及第三腕部控制线孔415;
所述第三中心支柱孔411与所述肩部卡盘410同心布置,所述第三末端手术操作器孔412、第二肩部控制线孔413、第四相变管孔414和第三腕部控制线孔415均对称分布于所述第三中心支柱孔411的外侧,所述第三腕部控制线孔415位于所述第三中心支柱孔411和所述第四相变管孔414之间,所述第二肩部控制线孔413位于相邻的第三末端手术操作器孔412和第四相变管孔414之间。
在本发明提供的手术机械臂中,肩部卡盘410的个数不受限定。第三中心支柱孔411为通孔,直径为1mm,与所述肩部卡盘410同心布置;中心支柱600穿过第三中心支柱孔411,中心支柱600的外圆柱面与第三中心支柱孔411的内圆柱面相配合,配合方式为过盈配合。两个第三末端手术操作器孔412为通孔,直径为3.6mm,其圆心与所述肩部卡盘410截面圆心间的距离为4mm;末端手术操作器穿过第三末端手术操作器孔412以到达所述手术机械臂的末端以实施相关手术操作。
进一步地,四个周向均布的第二肩部控制线孔413为通孔,直径为0.4mm,其圆心与所述肩部卡盘410截面圆心间的距离为5.6mm;四条肩部控制线700分别穿过四个第二肩部控制线孔413。两个第四相变管孔414为通孔,直径为4.6mm,其圆心与所述肩部卡盘410截面圆心间的距离为3.5mm;第一相变管110和第二相变管120分别穿过两个第四相变管孔414,第一相变管110和第二相变管120的外圆柱面分别与两个第四相变管孔414的内圆柱面相贴合,采用粘结剂固定。四个周向均布的第三腕部控制线孔415为通孔,直径为0.4mm,其圆心与所述肩部卡盘410截面圆心间的距离为1mm;四条腕部控制线800分别穿过四个第三腕部控制线孔415。所述肩部卡盘410的高度为2.0mm,外径为12.2mm,最小壁厚为0.3mm,选用316不锈钢材质,可利用精密金属3D打印或激光切割工艺加工。
所述肘部第一卡盘420为圆柱形,所述肘部第一卡盘420上设有:第四中心支柱孔421、第四末端手术操作器孔422、第三肩部控制线孔423、第五相变管孔424以及第四腕部控制线孔425;
所述第四中心支柱孔421与所述肘部第一卡盘420同心布置,所述第四末端手术操作器孔422、第三肩部控制线孔423、第五相变管孔424和第四腕部控制线孔425均对称分布于所述第四中心支柱孔421的外侧,所述第四腕部控制线孔425位于所述第四中心支柱孔421和所述第五相变管孔424之间,所述第三肩部控制线423孔位于相邻的第四末端手术操作器孔422和第五相变管孔424之间。
在本发明实施例中,所述第四中心支柱孔421为通孔,直径为1mm,第四中心支柱孔421与所述肘部第一卡盘420同心布置;中心支柱600穿过第四中心支柱孔421,中心支柱600的外圆柱面与第四中心支柱孔421的内圆柱面相配合,配合方式为过盈配合。两个第四末端手术操作器孔422为通孔,直径为3.6mm,其圆心与所述肘部第一卡盘420截面圆心间的距离为4mm;末端手术操作器穿过第四末端手术操作器孔422以到达所述手术机械臂的末端以实施相关手术操作。
进一步地,四个周向均布的第三肩部控制线孔423为通孔,直径为0.4mm,其圆心与所述肘部第一卡盘420截面圆心间的距离为5.6mm;四条肩部控制线700穿过四个第三肩部控制线孔423后在末端打结,使用肩部控制线套管710对末端打结处进行套合,肩部控制线套管710为热缩管,加热后其直径变小进而使得肩部控制线套管710与肩部控制线700之间固定。通过对四条肩部控制线700的末端进行打结并使用肩部控制线套管710进行套合后,可使得肩部控制线700末端的直径大于第三肩部控制线孔423的直径,进而使得肩部控制线700在被拉伸的过程中不会脱落。两个第五相变管孔424为通孔,直径为4.6mm,其圆心与所述肘部第一卡盘420截面圆心间的距离为3.5mm;第一相变管110和第二相变管120分别穿过两个第五相变管孔424,第一相变管110和第二相变管120的外圆柱面分别与两个第五相变管孔424的内圆柱面相贴合,采用粘结剂固定。四个周向均布的第四腕部控制线孔425为通孔,直径为0.4mm,其圆心与所述肘部第一卡盘420截面圆心间的距离为1mm;四条腕部控制线800分别穿过四个第四腕部控制线孔425。所述肘部第一卡盘420的高度为2.0mm,外径为12.2mm,最小壁厚为0.3mm,选用316不锈钢材质,可利用精密金属3D打印或激光切割工艺加工。
所述肘部第二卡盘430为圆柱形,所述肘部第二卡盘430上设有:第五中心支柱孔431、第五末端手术操作器孔432、第五腕部控制线孔433以及第六相变管孔434。
所述第五中心支柱孔431与所述肘部第二卡盘430同心布置,所述第五末端手术操作器孔432、第六相变管孔434和第五腕部控制线孔433均对称分布于所述第六中心支柱孔431的外侧,所述第五腕部控制线孔433位于相邻的第五末端手术操作器孔432和第六相变管孔434之间。
在本发明实施例中,所述第五中心支柱孔431为通孔,直径为1mm,与所述肘部第二卡盘430同心布置;中心支柱600穿过第五中心支柱孔431,中心支柱600的外圆柱面与第五中心支柱孔431的内圆柱面相配合,配合方式为过盈配合。两个第五末端手术操作器孔432为通孔,直径为3.6mm,其圆心与所述肘部第二卡盘430截面圆心间的距离为4mm;末端手术操作器穿过第五末端手术操作器孔432以到达所述手术机械臂的末端以实施相关手术操作。
进一步地,四个周向均布的第五腕部控制线孔433为通孔,直径为0.4mm,其圆心与所述肘部第二卡盘430截面圆心间的距离为5.6mm;四条腕部控制线800分别穿过四个第五腕部控制线孔433。两个第六相变管孔434为通孔,直径为4.6mm,其圆心与所述肘部第二卡盘430截面圆心间的距离为3.5mm;第一相变管110和第二相变管120分别穿过两个第六相变管孔434,第一相变管110和第二相变管120的外圆柱面分别与两个第六相变管孔434的内圆柱面相贴合,采用粘结剂固定。所述肘部第二卡盘430的高度为2.0mm,外径为12.2mm,最小壁厚为0.3mm,选用316不锈钢材质,可利用精密金属3D打印或激光切割工艺加工。
所述腕部卡盘440为圆柱形,所述腕部卡盘440上设有:第六中心支柱孔441、第六末端手术操作器孔442、第六腕部控制线孔443以及第七相变管孔444;
所述第六中心支柱孔441与所述腕部卡盘440同心布置,所述第六末端手术操作器孔442、第七相变管孔444和第六腕部控制线孔443均对称分布于所述第六中心支柱孔441的外侧,所述第六腕部控制线孔443位于相邻的第六末端手术操作器孔442和第七相变管孔444之间。
本发明提供的手术机械臂中,腕部卡盘440的个数不受限定。第六中心支柱孔441为通孔,直径为1mm,与所述腕部卡盘440同心布置,中心支柱600穿过第六中心支柱孔441,中心支柱600的外圆柱面与第六中心支柱孔441的内圆柱面相配合,配合方式为过盈配合。两个第六末端手术操作器孔442为通孔,直径为3.6mm,其圆心与所述腕部卡盘440截面圆心间的距离为4mm;末端手术操作器穿过第六末端手术操作器孔442以到达所述手术机械臂的末端以实施相关手术操作。
进一步地,四个周向均布的第六腕部控制线孔443为通孔,直径为0.4mm,其圆心与所述腕部卡盘440截面圆心间的距离为5.6mm;四条肩部控制线700分别穿过四个第六腕部控制线孔443。两个第七相变管孔444为通孔,直径为4.6mm,其圆心与所述腕部卡盘440截面圆心间的距离为3.5mm;第一相变管110和第二相变管120分别穿过两个第七相变管孔444,第一相变管110和第二相变管120的外圆柱面分别与两个第七相变管孔444的内圆柱面相贴合,采用粘结剂固定。所述腕部卡盘440的高度为2.0mm,外径为12.2mm,最小壁厚为0.3mm,选用316不锈钢材质,可利用精密金属3D打印或激光切割工艺加工。
在本发明实施例中,手术机械臂的末端(后端卡盘500)到达人体内部病灶处的大体位置后,还需要对其末端的位置进行进一步的调整,以将其末端搭载的末端手术操作器更加精确地送达病灶处。本发明中的手术机械臂末端位置的调整采用控制线驱动的方式,控制线由置于人体外部的电机驱动。
具体的,结合图13和图14描述本发明所述手术机械臂腕部姿态的控制原理。所述手术机械臂中,前端卡盘300与肘部第一卡盘420之间的区域为所述手术机械臂的肩部,肘部第一卡盘420与肘部第二卡盘430之间的区域为所述手术机械臂的肘部,肘部第二卡盘430与后端卡盘500之间的区域为所述手术机械臂的腕部。本发明所述手术机械臂采用线驱动方式调整腕部姿态以调整手术机械臂末端位置,通过拉伸或释放肩部控制线700和腕部控制线800可调节腕部姿态。肩部控制线700贯穿所述手术机械臂的肩部,周向均匀分布且分散在手术机械臂肩部的四周;肩部控制线700依次经过前端卡盘300中的第一肩部控制线孔303、肩部卡盘410中的第二肩部控制线孔413以及肘部第一卡盘420中的第三肩部控制线孔423,其末端固定于肘部第一卡盘420的一端面。腕部控制线800贯穿整个手术机械臂,周向均匀分布且集中在手术机械臂肩部的中央,经过所述手术机械臂肘部的过度进入所述手术机械臂腕部,其周向均匀分布且分散在手术机械臂腕部的四周;腕部控制线800依次经过前端卡盘300中的第二腕部控制线孔305、肩部卡盘410中的第三腕部控制线孔415、肘部第一卡盘420中的第四腕部控制线孔425、肘部第二卡盘430中的第五腕部控制线孔433、腕部卡盘440中的第六腕部控制线孔443以及后端卡盘500中的第一腕部控制线孔503,其末端固定于后端卡盘500的一端面。
所述腕部控制线800可用于控制所述手术机械臂腕部的姿态以调节后端卡盘500的位置,如图14所示,以方向1拉伸腕部第一控制线801,以方向3释放腕部第三控制线803,所述手术机械臂的腕部将朝着方向5弯曲;相反,以与方向1相反的方向释放腕部第一控制线801,以与方向3相反的方向拉伸腕部第三控制线803,所述手术机械臂的腕部将朝着方向7弯曲;以方向4拉伸腕部第四控制线804,以方向2释放腕部第二控制线802,所述手术机械臂的腕部将朝着方向8弯曲;
相反,以与方向4相反的方向释放腕部第四控制线804,以与方向2相反的方向拉伸腕部第二控制线802,所述手术机械臂的腕部将朝着方向6弯曲;因此,通过人体外部电机对腕部第一控制线801、腕部第二控制线802、腕部第三控制线803、腕部第四控制线804的耦合控制,可调节所述手术机械臂腕部的位姿以达到调整手术机械臂后端卡盘500位置的目的。
由于腕部控制线800通过手术机械臂的肩部(穿过前端卡盘300以及多个肩部卡盘410),因此电机对腕部控制线800的拉伸或释放也对手术机械臂的肩部产生了驱动力。而手术机械臂末端到达人体内大致的病灶处后只需要调整腕部位姿,肩部位于人体自然腔道内且其位姿无需调整,因此肩部控制线700也由置于人体外部的电机驱动,以产生驱动力以抵消腕部控制线800在手术机械臂肩部产生的驱动力,使得腕部控制线800在控制手术机械臂腕部的位姿时,手术机械臂肩部的位姿不会改变。
本发明中所有的肩部控制线700和腕部控制线800外伸出所述前端卡盘300的一端均与置于人体外部的电机连接以传递驱动力,进一步地,如图13和图14所示,腕部控制线800的与所述后端卡盘500连接的一端打结,并使用腕部控制线套管810(热缩管)套合并进行加热后使得腕部控制线套管810固定在腕部控制线800的末端打结处,这样可使得腕部控制线800与所述后端卡盘500连接的一端的直径大于后端卡盘500上的第一腕部控制线孔503的直径;然后将腕部控制线800与所述后端卡盘500连接的一端利用粘结剂固定在后端卡盘500的对应位置,使得腕部控制线800在被电机拉伸或释放时不会脱落;同理,所述肩部控制线700与所述肘部第一卡盘420连接的一端打结,并使用肩部控制线套管710(热缩管)套合并进行加热后使得肩部控制线套管710固定在肩部控制线700的末端打结处,并将肩部控制线700与所述肘部第一卡盘420连接的一端利用粘结剂固定在肘部第一卡盘420的对应位置。
其中,所述前端卡盘300、多个肩部卡盘410、肘部第一卡盘420、肘部第二卡盘430、多个腕部卡盘440以及后端卡盘500上开设在同一轴线上的各个末端手术操作器孔可构成末端手术操作器通道,所述手术机械臂的末端到达人体内病灶处后,末端手术操作器可沿着末端手术操作器通道到达手术机械臂的末端,末端手术操作器通道对末端手术操作器进入手术机械臂起到导向作用。可选的,末端手术操作器(图中未示出)包括手术分离钳、爪钳、持针器、剪刀以及内窥镜镜头等,末端手术操作器一般采用丝线驱动,内窥镜镜头包含通信线缆,多个依次排布的末端手术操作器孔构成的末端手术操作器通道对末端手术操作器所需的丝线驱动和内窥镜镜头包含的通信线缆起到周向及径向的定位作用。
值得一提的是,将热水注入所述手术机械臂过程中,热水散发出的多余热量将导致所述手术机械臂的外表面温度升高,而手术机械臂工作时其外表面与人体自然腔道的内壁贴合,表面温度过高将灼伤人体自然腔道的内壁。因此,所述手术机械臂的外包覆层900选用相变微胶囊材料,相变微胶囊材料具有高储能密度,可以吸收大量的热量;并且相变微胶囊材料具有滞后导热性能,可以在其表面温度较低的情况下将吸收的热量散出。
具体的,所述外包覆层900包括外包覆层外壁910、外包覆层内壁920和相变微胶囊层930;所述外包覆层内壁920包覆于所述前端卡盘300、肩部卡盘410、肘部第一卡盘420、肘部第二卡盘430、腕部卡盘440以及后端卡盘500的外圆柱面,所述相变微胶囊层930覆盖设置在所述外包覆层内壁920的外侧面,所述外包覆层外壁910覆盖设置在所述相变微胶囊层930的外侧面。
在本发明实施例中,请一并参阅图15至图18,所述外包覆层900分为三层:外包覆层外壁910、外包覆层内壁920以及相变微胶囊层930。外包覆层外壁910为中空管道,外径为15.0mm,内径为14.6mm,壁厚为0.2mm,选用橡胶材质;外包覆层内壁920为中空管道,外径为12.6mm,内径为12.2mm,壁厚为0.2mm,选用橡胶材质;外包覆层外壁910与外包覆层内壁920同心布置,外包覆层外壁910的内圆柱面与外包覆层内壁920的外圆柱面之间的间隔区域填充有相变微胶囊层930,相变微胶囊层930宏观上呈固体粉末状态,由直径为40微米的相变微胶囊颗粒931组成,相变微胶囊颗粒931由微胶囊外壳932和微胶囊内核933组成,微胶囊内核933的材料为石蜡,微胶囊外壳932的一般选用热稳定性较强的材料(如TiO
更具体的,外包覆层内壁920与前端卡盘300、多个肩部卡盘410、肘部第一卡盘420、肘部第二卡盘430、多个腕部卡盘440以及后端卡盘500的外圆柱面采用粘结剂固定,填充入相变微胶囊后,使用外包覆层900前端封盖940、外包覆层900末端封盖950进行封闭以防止相变微胶囊粉末泄露出来,外包覆层900前端封盖940、外包覆层900末端封盖950为圆环形,外径为14.6mm,内径为12.6mm,采用聚乙烯塑料材质;外包覆层900的前端封盖940和末端封盖950与外包覆层外壁910的内圆柱面、外包覆层内壁920的外圆柱面之间采用粘结剂固定。
下面结合图19和图20对本实施例中的手术机械臂的工作原理进行介绍:
热水浴锅50将水加热至制成第一相变管110和第二相变管120的热塑性塑料的玻璃转化温度和其熔点之间的温度,蠕动泵60将热水由第一导水管210泵入手术机械臂,随后热水通过第一导水管210流至所述液体回流通道510,并通过第二导水管220流出手术机械臂外部的蓄水槽70,待手术机械臂轴向刚度变小时,将手术机械臂沿着人体自然腔道送入体内,在手术机械臂送入体内的过程中,热水在手术机械臂内部一直处于循环流动状态,以保证过程中手术机械臂的柔性;当手术机械臂末端到达病灶的大体位置后,通过电机驱动肩部控制线700和腕部控制线800以控制所述手术机械臂腕部的位姿,以达到调节手术机械臂后端卡盘500的位置,将后端卡盘500精确地送达病灶处。然后利用制冷器80将水降温至5℃,蠕动泵60将冷水泵入手术机械臂内,待手术机械臂轴向刚度变大时,停止冷水的泵入,并将末端手术操作器沿着手术机械臂内的手术工具通道(多个依次排布的末端手术操作器孔)送达手术机械臂的末端并探出后端卡盘500外,然后开始实施相关的手术操作。
本发明与现有技术相比的优势在于:
(1)利用具有生物相容性的热塑性塑料制成第一相变管110和第二相变管120来实现本发明中手术机械臂的轴向刚度调控,所选材料安全无毒。
(2)对热塑性塑料制成的第一相变管110和第二相变管120的相变激发方式选用冷、热水,与现有采用电流以及电压进行相变激发的变刚度技术相比,更具手术安全性。
(3)本发明中的手术机械臂的外径为15mm,与常用的基于形锁合法和颗粒阻塞原理设计的刚度可控手术机械臂相比,尺寸较小,可很好地适应人体自然腔道;且其内部具有较大的多个末端手术操作器孔构成的末端手术操作器通道,可容纳更多种类的末端手术操作器。
(4)本发明中的手术机械臂的外包覆层900选用相变微胶囊,其具有高储能密度及滞后导热性能,可将手术机械臂内腔中热水散发出的多余热量吸收,并可以在保持较低温度的情况下,将所吸收的热量排出。因此,所述手术机械臂工作时的外表面温度较为适宜,不会对与之贴合的人体自然腔道内壁造成伤害。
实施例二:
请参阅图21,本发明在上述手术机械臂的基础上,还公开了一种手术机械臂的刚度调控方法,包括:
S100、在第一导水管210和第二导水管220内注入温度高于制成所述第一相变管110和第二相变管120的热塑性材料玻璃转化温度、且低于其熔点的水,制成所述第一相变管110和第二相变管120的热塑性材料由玻璃态转变为高弹态,此时所述第一相变管110和第二相变管120质地变软,以使所述第一相变管110和第二相变管120具有较小的轴向刚度;
S200、在第一导水管210和第二导水管220内注入温度低于制成所述第一相变管110和第二相变管120的热塑性材料的玻璃转化温度的水,制成所述第一相变管110和第二相变管120的热塑性材料由高弹态转变为玻璃态,此时所述第一相变管110和第二相变管120质地变硬,以使所述第一相变管110和第二相变管120具有较大的轴向刚度。
在本发明实施例中,第一相变管110和第二相变管120由热塑性塑料制成,纵向贯穿整个手术机械臂,第一相变管110的内圆柱面贴合有第一导水管210,第二相变管120的内圆柱面贴合有第二导水管220。手术机械臂的末端设置有液体回流通道510,向第一导水管210内泵入一定温度的水,水到达手术机械臂末端的液体回流通道510后,流入第二导水管220并在机械臂的前端流出。向导管内泵入热水时,当热水温度高于热塑性塑料的玻璃转化温度且低于其熔点时,热塑性塑料产生相变,转化为高弹态;第一相变管110和第二相变管120质地变软,可使手术机械臂的轴向刚度变小,柔性的手术机械臂可很好地适应人体内自然腔道的复杂形状。当向导管内泵入冷水时,可起到冷却作用,使得第一相变管110和第二相变管120的温度低于其材料的玻璃转化温度,使其相变进入玻璃态,此时第一相变管110和第二相变管120变硬,进而使得手术机械臂的轴向刚度变大,此时刚性的手术机械臂可为末端手术操作器提供一个稳固的操作平台,以保证手术精度。其中,所述手术机械臂的外包覆层900选用相变微胶囊材料,相变微胶囊具有高储能特性及滞后导热性能,可吸收大量泵入第一导水管110和第二导水管120内热水传导出的热量,防止手术机械臂的外表面温度升高,灼伤人体自然腔道的内表面。
综上所述,本发明提供了一种手术机械臂的刚度调控方法及手术机械臂,包括:第一相变管、第二相变管、第一导水管、第二导水管、前端卡盘、肩部卡盘、肘部第一卡盘、肘部第二卡盘、腕部卡盘、后端卡盘、中心支柱、肩部控制线、腕部控制线以及外包覆层;所述第一相变管的一端和所述第二相变管的一端均设置在所述前端卡盘内,所述第一相变管的一端和所述第二相变管的一端的端面与前端卡盘的端面平齐设置,所述第一相变管的另一端和所述第二相变管的另一端依次穿过所述肩部卡盘、肘部第一卡盘、肘部第二卡盘和腕部卡盘设置在所述后端卡盘内;所述第一导水管的第一端和第二导水管的第一端分别外伸出前端卡盘;所述第一导水管的外圆柱面与所述第一相变管的内圆柱面相贴合、所述第二导水管的外圆柱面与所述第二相变管的内圆柱面相贴合,所述第一导水管和第二导水管用于注入热水并将热量传导至第一相变管和第二相变管,使得第一相变管和第二相变管的温度升高和所述第一导水管、第二导水管还用于注入冷水并将第一相变管和第二相变管中的热量吸收,使得第一相变管和第二相变管的温度降低;所述后端卡盘内开设有液体回流通道,所述液体回流通道连通于所述第一导水管的第二端和第二导水管的第二端;所述中心支柱位于所述第一相变管和第二相变管之间,且所述中心支柱的一端的端面与前端卡盘的端面平齐设置、另一端依次穿过所述肩部卡盘、肘部第一卡盘、肘部第二卡盘和腕部卡盘并与所述后端卡盘连接;所述外包覆层包覆于所述前端卡盘、肩部卡盘、肘部第一卡盘、肘部第二卡盘、腕部卡盘以及后端卡盘的外圆柱面;所述肩部控制线的一端外伸出所述前端卡盘、另一端穿过所述肩部卡盘并与所述肘部第一卡盘连接;所述腕部控制线的一端外伸出所述前端卡盘、另一端依次穿过所述肩部卡盘、肘部第一卡盘、肘部第二卡盘和腕部卡盘并与所述后端卡盘连接。本发明实施例中的手术机械臂可实现轴向刚度的调整,柔性状态下的手术机械臂可很好地适应人体自然腔道的复杂形状以保证手术安全性,刚性状态下的手术机械臂可为末端手术操作器提供一个稳固的操作平台以保证手术精度。
本领域技术人员在考虑说明书及实践这里公开的方案后,将容易想到本发明的其它实施方案。本发明旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由权利要求所指出。
- 一种手术机械臂的刚度调控方法及手术机械臂
- 一种手术机器人变刚度腕部结构及手术机械臂