一种磁浮车
文献发布时间:2023-06-19 11:17:41
【技术领域】
本发明涉及轨道交通技术领域,尤其涉及一种磁浮车。
【背景技术】
现有磁悬浮列车分为常导型和超导型两大类。常导型也称常导磁吸型,以德国高速常导磁浮列车transrapid为代表,它是利用普通直流电磁铁电磁吸力的原理将列车悬起,悬浮的气隙较小,一般为10毫米左右。常导型高速磁悬浮列车的速度可达每小时400~500公里,适合于城市间的长距离快速运输。而超导型磁悬浮列车也称超导磁斥型,以日本MAGLEV为代表,它是利用超导磁体产生的强磁场,列车运行时与布置在地面上的线圈相互作用,产生电动斥力将列车悬起,悬浮气隙较大,一般为100毫米左右,速度可达每小时500公里以上。尽管磁悬浮列车有上述的许多优点,但仍然存在一些不足:1、在现有的电源供电条件下,推力不足,再提高车速比较困难;2、现有的磁悬浮列车悬浮在轨道上,在高速下有脱轨风险。3.磁浮列车不能脱离地面轨道运行。
【发明内容】
本发明的目的在于提供一种磁浮车,其可以解决背景技术中涉及的技术问题。
为了实现上述目的,本发明的技术方案如下:
一种磁浮车,包括磁浮推进装置、供电系统、防坠地系统、调流控速系统、导航自动驾驶系统、空调系统、转向行驶系统以及电气电控系统。
作为本发明的一种优选改进,所述磁浮推进装置为8面线圈阵列同时受力结构或多面线圈阵列同时受力结构。所述磁浮推进装置包括田径式轨道、套设于所述田径式轨道上的方形移动体、环设于所述方形移动体周侧的外侧轨道以及交流电源,所述的田径式轨道包括两条方柱轨道和两个圆弧轨道首位相连组成。所述田径式轨道包括方柱轨道本体部和设置于所述方柱轨道本体部的四个侧表面上的第一方形线圈阵列,所述外侧轨道包括外侧轨道本体部和设置于所述外侧轨道本体部正对所述方形移动体的表面上的第二方形线圈阵列,所述方形移动体包括正对所述方柱轨道本体部的内侧表面、正对所述外侧轨道的外侧表面、设置于所述内侧表面上并与所述第一方形线圈阵列作用的第一磁钢阵列和设置于所述外侧表面上并与所述第二方形线圈阵列作用的第二磁钢阵列,所述第一方形线圈阵列和所述第二方形线圈阵列的第一线圈阵列、第二线圈阵列、第三线圈阵列、第四线圈阵列、第五线圈阵列、第六线圈阵列、第七线圈阵列和第八线圈阵列分别与所述交流电源的第一输出电流、第二输出电流、第三输出电流、第四输出电流、第五输出电流、第六输出电流、第七输出电流和第八输出电流相连接,其中,所述第一方形线圈阵列与所述第一磁钢阵列以及所述第二方形线圈阵列与所述第二磁钢阵列分别产生将驱动所述方形移动体沿所述方柱轨道移动的水平向电磁力,其中一根所述方柱轨道使得所述方形移动体加速,另一根所述方柱轨道使得所述方形移动体减速,从而形成可循环的循环运动。因所述方形移动体的速度大小仅与输出电流频率有关而与受力大小无关,所以所述方形移动体缓慢移动也可产生大推力。所述方形移动体的每个面和与之相对的方柱轨道或外侧轨道之间均设置若干根单边固定的导磁材料支架支撑,所述导磁材料支架末端设置为与圆球小轮相连接,所述圆球小轮贴合对侧,磁极间间隔0.1mm,所述方形移动体、方柱轨道和外侧轨道均设置为十分平滑。因所述田径式轨道的受力与所述方形移动体的速度无关所以即使因此结构而有摩擦力也与车体的推力无关。
所述防故障坠地系统包含自动检测故障装置、备用升力装置、跳伞装置、防坠地控制系统和备用电源,所述防坠地控制系统为当非正常离地500米时,启用该系统强制提供升力以防坠地,升力不够时提醒机主启用跳伞装置。依据所述导航自动驾驶系统的时刻车速,依竖直方向车速v和离地高度h根据V
所述供电系统包括发电机或蓄电池,变频电源。所述发电机发电或者蓄电池连接变频电源供电,所述供电电源输出220v/380v低频精确可调频调流的电压。其中一根所述方柱轨道的所述第一方形线圈阵列和所述第二方形线圈阵列的线圈供电电流为另一所述方柱轨道的n个百分比以确保方形所述方形移动体在能量损耗的情况下仍能环绕轨道做循环运动。
所述调流控速系统通过给予所述第一线圈阵列和所述第二线圈阵列的电流大小来控制加速度的大小,根据频率f=V相对/磁铁长,此频率电流给予所述第一线圈阵列和所述第二线圈阵列的磁极供电,所述第一线圈阵列和所述第二线圈阵列的磁极按该频率发生磁极变化,与所述方形车体上的所述第一磁钢阵列和所述第二磁钢阵列产生同向作用力,因受力方向一致而速度方向相反,所以其中一根所述方柱轨道使得所述方形移动体加速时,另一根所述方柱轨道使得所述方形移动体减速,从而形成可循环的循环运动。
作为本发明的一种优选改进,所述方柱轨道透过方形移动体空缺处与外侧轨道相连接,所述外侧轨道连接可旋转托盘,所述可旋转托盘连接车体,所述可旋转托盘连接方向盘,控制所述方向盘牵引托盘转向即可实现转向功能。
作为本发明的一种优选改进,所述方形移动体为8面受力的稳定悬浮可循环运动结构。所述方柱轨道和外侧轨道分别包含所述轨道本部以及第一方形线圈阵列和第二方形线圈阵列。所述第一方形线圈阵列包括多个磁极可变且朝向所述方形移动体方向的第一线圈阵列、第二线圈阵列、第三线圈阵列、第四线圈阵列,所述第二方形线圈阵列包括多个磁极可变且朝向所述方形移动体方向的第五线圈阵列、第六线圈阵列、第七线圈阵列、第八线圈阵列,所述方形移动体为内测第一方形磁钢阵列和外侧第二方形磁钢阵列,所述第一磁钢阵列为朝向所述方柱轨道本体部四个方向的沿所述方形移动体移动方向交错设置的磁极,所述第二磁钢阵列为朝向各所述外侧轨道本体部四个方向的沿所述方形移动体移动方向交错设置的磁极。所述方形移动体包括四条首尾相接的侧壁,每条所述侧壁夹设于所述方柱轨道与所述外侧轨道之间。
作为本发明的一种优选改进,所述防故障坠地系统包含自动检测故障装置、备用升力装置、跳伞装置、防坠地控制系统和备用电源。所述防坠地控制系统为当非正常离地500米时,启用该系统强制提供根据计算所得升力以防坠地,升力不够时提醒机主启用跳伞装置。
作为本发明的一种优选改进,还包括制动控制器,通过所述制动控制器控制所述第一线圈阵列和所述第二线圈阵列的磁极变化,与所述方形车体上的所述第一磁钢阵列和所述第二磁钢阵列产生反作用力,从而进行减速。
作为本发明的一种优选改进,所述方形移动体为四条首尾相接底部空缺一段的侧壁,每条所述侧壁夹设于所述方柱轨道与所述外侧轨道之间,空缺处为所述方柱轨道与外部所述外侧轨道的连接点。
作为本发明的一种优选改进,所述方形移动体的每个面和与之相对的方柱轨道或外侧轨道之间均设置若干根单边固定的导磁材料支架支撑,所述导磁材料支架末端设置为与圆球小轮相连接,所述圆球小轮贴合对侧,磁极间间隔0.1mm,方形移动体、方柱轨道和外侧轨道均设置为十分平滑。因所述田径式轨道的受力与所述方形移动体的速度无关所以即使因此结构而有摩擦力也与车体的推力无关。
作为本发明的一种优选改进,所述方柱轨道透过方形移动体空缺处与外侧轨道相连接,所述外侧轨道连接可旋转托盘,所述可旋转托盘连接车体,所述可旋转托盘连接方向盘,即所述田径式轨道结构连接车体固定。
作为本发明的一种优选改进,所述方柱导轨本体部以及所述外侧导轨本体部均由导磁材料制成。
作为本发明的一种优选改进,调整所述方柱轨道为其他形体轨道包括6面受力的三边轨道,10面受力的五边轨道等若干面受力轨道。
与相关技术相比,本发明提供的一种磁浮推进装置及磁浮车具有如下优点:
1、相对于传统的磁浮列车两个侧面施加推力来说,本申请至少8个面可同时施加推力,而方形移动体悬浮高度可从10mm减小为0.1mm,从而实现提供巨大的推力,实现再提速。
2、方形移动体包裹于方柱轨道上,并被外侧轨道包裹,双层保护,降低脱轨风险。
3、应用在悬浮车上可直接脱离地面轨道悬浮高速飞行。
【附图说明】
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:
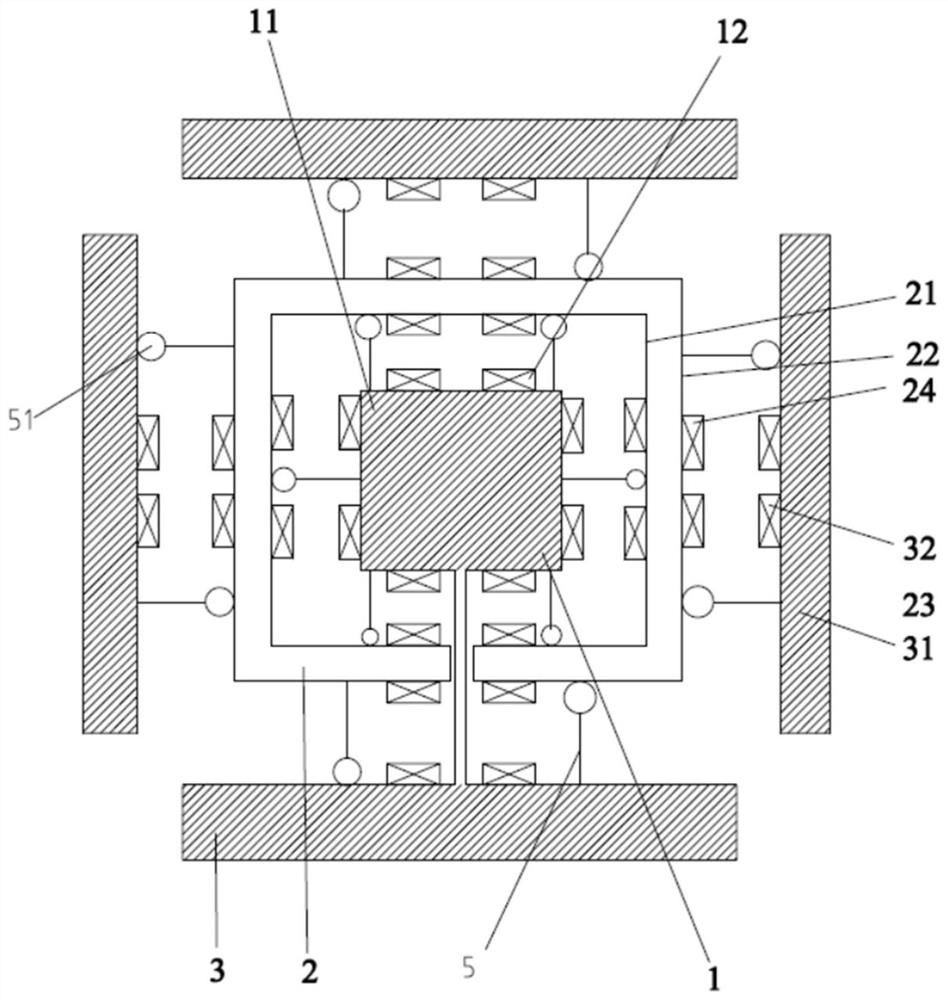
图1为本发明磁浮推进装置的剖视结构示意图;
图2为本发明磁浮推进装置的第一磁路结构示意图;
图3为本发明磁浮推进装置的第二磁路结构示意图。
【具体实施方式】
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后……)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
另外,在本发明中如涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
请参阅图1-3所示,本发明提供了一种悬浮车,包括磁浮推进装置、供电系统、防坠地系统、调流控速系统、导航自动驾驶等系统。
所述磁浮推进装置为8面线圈阵列同时受力结构或多面线圈阵列同时受力结构。所述磁浮推进装置包括田径式轨道、套设于所述方柱轨道1上的方形移动体2、环设于所述方形移动体2周侧的外侧轨道3以及交流电源4,所述方形移动体2夹设于所述方柱轨道1与所述外侧轨道3之间并沿所述方柱轨道1的长度方向移动。
所述方柱轨道1包括方柱轨道本体部11和设置于所述方柱轨道本体部11的四个外侧表面上的第一方形线圈阵列12,所述外侧轨道3包括外侧轨道本体部31和设置于所述外侧轨道本体部31正对所述方形移动体2的表面上的第二方形线圈阵列32,所述方形移动体2包括正对所述方柱轨道本体部11的内侧表面21、正对所述外侧轨道3的外侧表面22、设置于所述内侧表面21上并与所述第一方形线圈阵列12作用的第一磁钢阵列23和设置于所述外侧表面22上并与所述第二方形线圈阵列32作用的第二磁钢阵列24,所述第一方形线圈阵列12和所述第二方形线圈阵列32分别与所述交流电源4连接。
所述第一方形线圈阵列12包括多个磁极可变且朝向所述方形移动体2方向的第一方形线圈121。
所述第一方形磁钢阵列23包括沿所述方形移动体2移动方向交错设置的第一磁钢阵列231和第二磁钢阵列232,所述第一磁钢阵列231朝向的所述方柱轨道本体部11方向的磁极和所述第二磁钢阵列232朝向所述方柱轨道本体部11方向的两相邻磁极磁极相异。
所述第一方形线圈阵列12与所述第一方形磁钢阵列23以及所述第二方形线圈阵列32与所述第二方形磁钢阵列24产生将所述方形移动体2悬置于所述方柱轨道1与所述外侧轨道3之间的竖直向所述方形移动体2重力的电磁力以及驱动所述方形移动体2沿所述方柱轨道1移动的水平向电磁力。
所述第二方形线圈阵列32包括多个磁极可变且朝向所述方形移动体方向的第二线圈阵列321,所述第二方形磁钢阵列24包括沿所述方形移动体2移动方向交错设置的第三磁钢阵列241和第四磁钢阵列242,所述第三磁钢阵列241朝向所述外侧轨道本体部31方向的磁极与所述第四磁钢阵列242朝向所述外侧轨道本体部31方向的两相邻磁极磁极相异。
所述方形移动体2包括四条首尾相接的侧壁25,每条所述侧壁25夹设于所述方柱轨道2与所述外侧轨道3之间,这样,相对于传统的两个侧面施加推力来说,本发明提供的磁浮推进装置至少8个面可同时施加推力,从而可以提供更大的推力,提高所述方形移动体2的移动速度。
所述方柱导轨本体部21以及所述外侧导轨本体部31均由导磁材料制成,这样,可以减少电磁辐射,并可起到聚磁的作用。
当然,为了保证所述方形移动体2可停止移动,所述磁浮推进装置还包括制动控制器(未图示),通过所述制动控制器控制所述第一方形线圈阵列12和所述第二方形线圈阵列32的磁极变化频率,即所述方形车体1上的所述第一方形磁钢阵列23和所述第二方形磁钢阵列24产生反作用力,从而进行减速。
所述方形移动体2产生推力的原理如下:例如,所述第一方形磁钢阵列23的竖直方向上部第一磁钢阵列的其中一个所述第一磁钢231朝向所述第一线圈阵列12的磁极为N极,第二磁钢232为朝向所述第一线圈阵列12的磁极,磁极为S极,而所述第一方形线圈阵列12的竖直方向第一线圈阵列的其中一个所述第一线圈121朝向所述方形移动体2的磁极为S极,另一部分所述第一线圈121朝向所述方形移动体2的磁极为N极,则,所述第一磁钢231可以与朝向所述方形移动体2的磁极为S极的所述第一线圈121产生相互吸引的磁力,所述第一磁钢232可以与朝向所述方形移动体2的磁极为S极的所述第一线圈121产生相互排斥的磁力,所述第二磁钢232可以与朝向所述方形移动体2的磁极为N极的所述第一线圈122产生相互吸引的磁力,所述第二磁钢233可以与朝向所述方形移动体2的磁极为N极的所述第一线圈122产生相互排斥的磁力,从而拉动所述方形移动体2移动,在所述方形移动体2移动一定距离后,所述第一线圈121内的电流方向转变为反方向电流,从而所述第一线圈121的原先的S极变为N极,N极变为S极,同理继续拉动所述方形移动体2移动,从而可实现所述方形移动体2在同一根所述方柱轨道1上一直受同向力,所述方形移动体2的移动方向如图2和3中箭头所示。当运动至所述另一根方柱轨道上时,运动方向反向,同原理的,因受力方向一致,方形移动体2做减速运动。而所述另一根方柱轨道的推力大小为所述方柱轨道1的n个百分比,所以方形移动体做循环前进运动。当n值适当时,可使方形移动体做低速运动而车体受力很大。
所述方形移动体2的每个面和与之相对的方柱轨道1或外侧轨道3之间均设置若干根单边的导磁材料支架5支撑,所述导磁材料支架5末端设置为与圆球小轮51相连接,圆球小轮51与对侧贴合,磁极间间隔0.1mm,方形移动体2、方柱轨道1和外侧轨道3均设置为十分平滑。
所述方柱轨道1透过方形移动体2空缺处与外侧轨道3相连接,所述外侧轨道3连接可转向托盘连接车体,即所述田径式轨道结构连接车体固定。
所述防故障坠地系统包含自动检测故障装置、备用升力装置、跳伞装置、防坠地控制系统和备用电源,所述防坠地控制系统为当非正常离地500米时,启用该系统强制提供升力以防坠地,升力不够时提醒机主启用跳伞装置。依据所述导航自动驾驶系统的时刻车速,依竖直方向车速v和离地高度h根据V
所述供电系统包括发电机或蓄电池和变频电源,所述发电机发电或者所述蓄电池连接所述变频电源供电,所述供电电源输出220v/380v低频精确可调频调流的电流。其中一根所述方柱轨道的所述第一方形线圈阵列和所述第二方形线圈阵列的线圈供电电流为另一所述方柱轨道的n个百分比以确保方形所述方形移动体在能量损耗的情况下仍能环绕轨道做循环运动。
所述调流控速系统通过给予所述第一线圈阵列和所述第二线圈阵列的电流大小来控制加速度的大小,根据频率f=V相对/磁铁长,此频率电流给予所述第一线圈阵列和所述第二线圈阵列的磁极供电,所述第一线圈阵列和所述第二线圈阵列的磁极按该频率发生磁极变化,与所述方形车体上的所述第一磁钢阵列和所述第二磁钢阵列产生同向作用力,因受力方向一致而速度方向相反,所以其中一根所述方柱轨道使得所述方形移动体加速时,另一根所述方柱轨道使得所述方形移动体减速,从而形成可循环的循环运动。
本发明还提供了一种悬浮车等飞行器的优选实施方案,所述磁浮推进装置田径式轨道连接车体,让所述方形移动体空循环运动即可一直产生同向的推力,将所述磁浮推进装置水平、竖直方向各安装若干个,则所述悬浮车即可产生水平推力和升降力。即可实现悬浮车悬浮飞行。
本发明还提供了一种磁浮列车优选实施方案,所述磁浮列车应用所述的磁浮推进装置的8面受力结构磁浮列车连接方形移动体,方形移动体连接原始悬浮装置,所述方柱轨道连接地面即可应用所述8面受力提供大推力实现再提速。优选的,考虑到磁极简间距可缩小至0.1mm,就可考虑是否让悬浮列车不再悬浮也能达到比悬浮更大效果的推力,而数据表明磁极磁力10mm间距与0mm间距之间的差距有近20倍,所以可以考虑悬浮列车放弃悬浮而使用8面受力结构和用小轮支撑保持各磁极间间距0.1mm,而使得伪悬浮比之悬浮所受合推力更大。
与相关技术相比,本发明提供的一种磁浮推进装置具有如下优点:
1、相对于传统的两个侧面施加推力来说,本申请至少8个面可同时施加推力,而方形移动体悬浮高度只有0.1mm即磁铁的受力距离从10mm减小为0.1mm,从而可以提供更大的推力,实现再提速;
2、方形移动体包裹于方柱轨道上,并被外侧轨道包裹,双层保护,降低脱轨风险。
3.磁浮推进装置竖直安装即可提供升力,连接田径式轨道的车体即可脱离地面轨道悬浮飞行。
尽管本发明的实施方案已公开如上,但并不仅仅限于说明书和实施方案中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里所示出与描述的图例。
- 一种磁浮车及磁浮车的走行部
- 滑台装置、磁浮车走行系统及磁浮列车