快速可复用结构成型装置及方法
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及辅助医疗器械领域,尤其是涉及一种应用于主动脉支架开窗的快速可复用结构成型装置及方法。
背景技术
主动脉支架开窗技术是累及主动脉分支血管腔内修复技术的发展方向,很多文献都证实了其可行性,但效率和安全性依然有待改进,主要的弊端:第一,开窗支架需要器械生产商定做,制作周期长(通常6-8周),手术医师参与度不高;第二,支架的开窗位置是根据影像学测量获得,由于是间接测量,会造成一定的误差。主要的并发症是由于开窗位置的偏差,造成分支动脉无法重建,进而出现相关的并发症。因此需要一种新的方法来实现手术医师在手术台上对分支开口所对应的支架覆膜进行精确定位,然后开窗或进行其他的操作。
现有技术参见CN 106618795 A一种应用3D打印模型进行主动脉支架体外开窗的方法,该方法主要利用3D打印将CTA或MRA所获取的的主动脉虚拟数字模型转化为现实中的实体模型,但是3D打印需要由下而上层层堆料,并且还要等待模型冷却,制造一个模型往往长达几个小时,对于紧急手术而言,还是过于漫长,而且模型成型后,还需要消毒备用,难免可能带来模型形变,微生物污染等风险,因此急需一种快速可复用的装置提高成型效率。
发明内容
本发明提供了一种快速可复用结构成型装置及方法,解决了手术时,主动脉支架开窗所需的模型制作效率低及常规术中开窗的不精确的问题。
为解决上述技术问题,本发明所采用的技术方案是:一种快速可复用结构成型装置,包括工作台,工作台上设有水平多关节机器人和阵列针板,水平多关节机器人上连接有拨动机构,拨动机构包括连接盘,连接盘上设有第一拨动头,阵列针板包括多个可滑动的定位针柱,第一拨动头用于拨动定位针柱。
优选的方案中,连接盘上连接有第二拨动头,第二拨动头直径比第一拨动头直径小,拨动机构还包括旋转轴、连接块和电机,连接块与水平多关节机器人连接,旋转轴与连接块转动套接,旋转轴一端与连接盘套接,电机通过旋转轴驱动连接盘旋转。
优选的方案中,拨动机构还包括行星减速器和安装板,电机与行星减速器连接,行星减速器通过安装板与连接块连接,行星减速器轴端连接有第二齿轮,旋转轴上套接有第一齿轮,第一齿轮与第二齿轮啮合转动,旋转轴上还套接有锁紧环。
优选的方案中,阵列针板还包括阻尼箱,阻尼箱中设有多个针柱套,针柱套与定位针柱滑动套接,阻尼箱两侧设有定位板,定位针柱穿过定位板。
优选的方案中,阻尼箱中还设有气腔,阻尼箱上还设有单向气阀,单向气阀与气腔连通。
优选的方案中,阻尼箱一端还设有调整腔,调整腔与气腔连通,调整腔中滑动连接有柱塞,柱塞外圈套有密封圈,气腔一端还连接有端盖,端盖中螺纹连接有调整顶丝,调整顶丝穿过端盖抵靠在柱塞上。
优选的方案中,阵列针板下方设有底架,底架上设有定位销,定位销与阵列针板连接,还设有多个手旋螺丝,手旋螺丝穿过阵列针板抵靠在定位销上。
优选的方案中,还包括第一相机和第一背板,第一相机和第一背板分别设在阵列针板两侧,阵列针板另外两侧分别设有第二相机和第二背板。
优选的方案中,第一拨动头做水平和竖直方向复合的连续运动,第一拨动头底端或侧面接触定位针柱顶端使定位针柱上下滑动。
包括成型方法,
S1、对主动脉进行CT或核磁扫描,获得的带影像数据的DICOM文件;
S2、对DICOM文件进行处理,提取有用部分数据,并转化为三维数字化软件中间格式;
S3、利用三维加工软件处理中间格式文件,生成加工路径代码文件;
S4、将路径代码文件导入水平多关节机器人的控制软件,控制连接盘转动,切换第一拨动头到工作位置;
S5、利用单向气阀向气腔充入气体,气压使针柱套抱紧定位针柱,形成一定的摩擦阻力;
S6、旋转调整顶丝改变柱塞位置,使气腔中气压随之变化以调整摩擦阻力到合适值;
S7、启动水平多关节机器人,水平多关节机器人带动第一拨动头按照路径代码连续移动并拨动路径上的定位针柱,使定位针柱向下移动;
S8、第一次路径加工代码执行完毕后,抬起第一拨动头,将第二拨动头切换到工作位置,执行第二次路径程序代码,第二次路径程序代码的路径密度大于第一次路径加工代码的路径密度;
S9、第二拨动头拨动路径上的定位针柱并使定位针柱下移,二次路径程序代码执行完毕后,抬起第二拨动头;
S10、利用第一相机和第二相机拍照,检测定位针柱下降高度,将不同定位针柱的高度值与理论数据比对,若正确则旋转调整顶丝,加大气腔中气压,锁紧定位针柱;
S11、取下阵列针板,将阵列针板放到定型装置上,定位针柱下端下压定型装置,使定型装置形成一定形状;
S12、将定型装置消毒处理;
S13、将主动脉支架放在定型装置中,标记主动脉支架在分支口的位置;
S14、在标记位置开窗。
本发明的有益效果为:利用数字化技术,将虚拟模型快速转化为现实模型,为医师手术提供便利,提高个体相应主动脉模型之制作效率,以及主动脉支架体外开窗位置的准确性,有效降低手术风险;利用拨动头连续捋动不同的针柱,代替逐个按压单个针柱的形式,大大提高成型效率;针板装置可快速搭建、反复使用;设有反馈检测的相机,可检测成型的轮廓面是否与CT等拍摄的虚拟模型相,提高装置的可靠性。
附图说明
下面结合附图和实施例对本发明作进一步说明。
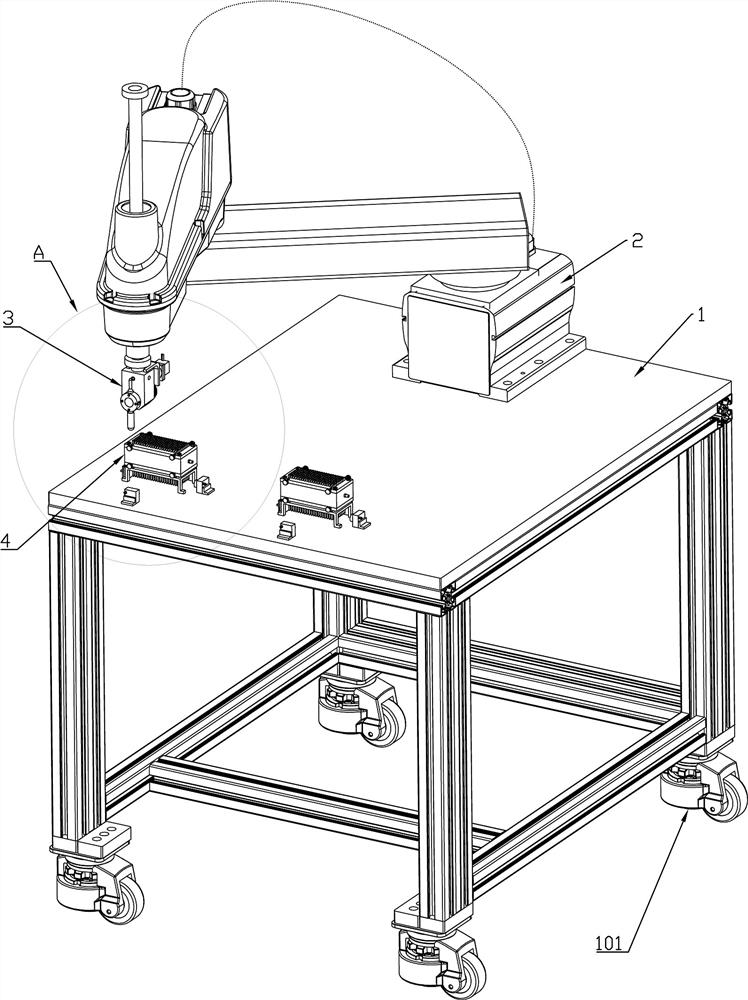
图1是本发明的示意图。
图2是本发明的A处放大图。
图3是本发明的阵列针板示意图。
图4是本发明的阵列针板剖面图B。
图5是本发明的阵列针板剖面图C。
图6是本发明的阻尼箱示意图。
图7是本发明的拨动机构示意图。
图8是本发明的拨动机构工作时剖面图。
图9是本发明的定型装置实施示意图。
图10是本发明的主动脉模型简化示意图。
图11是本发明的加工路径模拟图。
图中:工作台1;万向轮101;水平多关节机器人2;拨动机构3;连接盘301;第一拨动头302;第二拨动头303;锁紧顶丝304;旋转轴305;连接块306;锁紧环307;第一齿轮308;第二齿轮309;行星减速器310;电机311;安装板312;阵列针板4;阻尼箱401;针柱套402;定位针柱403;定位板404;气腔405;单向气阀406;柱塞407;密封圈408;端盖409;调整顶丝410;调整腔411;定型装置5;定型膜501;定型胶喷嘴502;紫外灯503;第一背板6;第二背板7;第一相机8;第二相机9;底架10;定位销1001;手旋螺丝11;主动脉模型12;分支1201。
具体实施方式
如图1-11中,一种快速可复用结构成型装置,包括工作台1,工作台1上设有水平多关节机器人2和阵列针板4,水平多关节机器人2上连接有拨动机构3,拨动机构3包括连接盘301,连接盘301上设有第一拨动头302,阵列针板4包括多个可滑动的定位针柱403,第一拨动头302用于拨动定位针柱403。
利用虚拟模型的数据,编写连续行走的路径程序,并导入到水平多关节机器人2的控制器中,水平多关节机器人2可根据路径程序带动第一拨动头302按照指定路径运动,第一拨动头302下端为球头,路径所过之处接触到的403被下压到指定位置,定位针柱403可悬停在该位置,路径程序执行完毕后,多个403被拨动或下压到指定位置,形成特定的凹陷轮廓面,阵列针板4可被快速取下,阵列针板4可重复使用。
由于主动脉为连续曲面,不存在突跳点的情况,路径程序执行逻辑为深度优先即先执行Z值较高的路径,再执行Z值较低的路径,路径间距和进给深度小于拨动头的半径,执行程序过程可连续走完路径,无须频繁抬起拨动头,水平多关节机器人2采用极坐标模式运转,相比于直线两轴滑台机构,无须进行曲线插补运算,移动速度更快,路径更加光顺流利,并且阵列针板4可反复使用,无须二次搭建,节省制作前期的准备工作的时间,制作一个模型的时间往往小于半小时。
优选的方案中,连接盘301上连接有第二拨动头303,第二拨动头303直径比第一拨动头302直径小,第二拨动头303下端为球头,拨动机构3还包括旋转轴305、连接块306和电机311,连接块306与水平多关节机器人2连接,旋转轴305与连接块306转动套接,旋转轴305一端与连接盘301套接,电机311通过旋转轴305驱动连接盘301旋转。
首先切换直径较大的第一拨动头302执行加工路径密度小的程序,由于路径密度小,可快速拨动定位针柱403形成大致的曲率半径较大的轮廓面,然后切换直径较小的第二拨动头303,执行曲率半径较小,第一拨动头302接触不到的位置,两种拨动头配合及保证成型效率,又保证最终精度;连接盘301上设有超过两个拨动头安装位,根据需要可增加拨动头,利用锁紧顶丝304锁紧每个拨动头。
优选的方案中,拨动机构3还包括行星减速器310和安装板312,电机311与行星减速器310连接,行星减速器310通过安装板312与连接块306连接,行星减速器310轴端连接有第二齿轮309,旋转轴305上套接有第一齿轮308,第一齿轮308与第二齿轮309啮合转动,旋转轴305上还套接有锁紧环307。
优选的方案中,阵列针板4还包括阻尼箱401,阻尼箱401中设有多个针柱套402,针柱套402与定位针柱403滑动套接,阻尼箱401两侧设有定位板404,定位针柱403穿过定位板404。
优选的方案中,阻尼箱401中还设有气腔405,阻尼箱401上还设有单向气阀406,单向气阀406与气腔405连通。
定位板404上的孔为定位孔,对定位针柱403起定位作用,阻尼箱401的四周骨架及上下面为刚性,且内腔封闭,针柱套402为橡胶或硅胶等柔性材质,气腔405中充气时,每个定位针柱403受到等大且单位面积均匀的挤压力,针柱套402对定位针柱403产生一定的摩擦阻力,通过调节气压可统一调节每个定位针柱403受到的阻力,使定位针柱403可悬停,同时也防止定位针柱403受到快速碰撞或挤压时出现位置过冲的“溜车”现象。
优选的方案中,阻尼箱401一端还设有调整腔411,调整腔411与气腔405连通,调整腔411中滑动连接有柱塞407,柱塞407外圈套有密封圈408,气腔405一端还连接有端盖409,端盖409中螺纹连接有调整顶丝410,调整顶丝410穿过端盖409抵靠在柱塞407上。
旋转调整顶丝410,可带动气腔405容积变化,进而改变气压。
优选的方案中,阵列针板4下方设有底架10,底架10上设有定位销1001,定位销1001与阵列针板4连接,还设有多个手旋螺丝11,手旋螺丝11穿过阵列针板4抵靠在定位销1001上。
优选的方案中,还包括第一相机8和第一背板6,第一相机8和第一背板6分别设在阵列针板4两侧,阵列针板4另外两侧分别设有第二相机9和第二背板7。
第一背板6和第二背板7用于遮挡背景杂光,第一相机8和第二相机9用于检测两个垂直方向被压下的定位针柱403最下端形成的轮廓线,利用该轮廓线与理论的虚拟模型两个垂直方向轮廓线比对,形成闭环反馈,防止出错,提高装置可靠性。
优选的方案中,第一拨动头302做水平和竖直方向复合的连续运动,第一拨动头302既能水平移动又能竖直移动,还能结合水平和竖直方向进行斜向插补运动,第一拨动头302底端或侧面接触定位针柱403顶端使定位针柱403上下滑动;连续运动是指第一拨动头302执行一端路径指令过程中无抬起动作,按照路径指令移动并压迫沿途的定位针柱403并使之下移,该方法区别于逐个竖直下压针柱的方法,成型效率更高。
工作台1下端至少四角设有万向轮101,万向轮101为福马轮内部带有可伸缩的固定支脚,可作为固定地脚使用。
优选的方案中,还包括定型装置5,定型装置5包括定型膜501和定型胶喷嘴502,定位针柱403下压使定型膜501形变,定型胶喷嘴502用于向定型膜501喷洒定型胶。
优选的方案中,定型胶喷嘴502喷洒出的胶为紫外胶,定型装置5还包括紫外灯503,紫外灯503用于照射定型膜501。
快干的紫外胶的凝固时间通常在30s左右,可大大节省成型时间,可选择纺织物等带有细空隙的材料作为定型膜501,定型胶喷嘴502向纺织物喷洒适量的紫外胶,紫外灯503照射后紫外胶凝固,纺织物快速定型成带有分支1201的主动脉模型12的模样,纺织物较轻且成本低,相比阵列针板4更加方便现场使用,同时适合批量化快速成型。
成型方法如下,
S1、对主动脉进行CT或核磁扫描,获得的带影像数据的DICOM文件;
S2、对DICOM文件进行处理,提取有用部分数据,并转化为三维数字化软件中间格式如STL、STEP、IGS等;
S3、利用三维加工软件如UG、mastercam等处理中间格式文件,生成加工路径代码文件如NC格式;
S4、将路径代码文件导入水平多关节机器人2的控制软件,控制连接盘301转动,切换第一拨动头302到工作位置;
S5、利用单向气阀406向气腔405充入气体,气压使针柱套402抱紧定位针柱403,形成一定的摩擦阻力;
S6、旋转调整顶丝410改变柱塞407位置,使气腔405中气压随之变化以调整摩擦阻力到合适值;
S7、启动水平多关节机器人2,水平多关节机器人2带动第一拨动头302按照路径代码连续移动并拨动路径上的定位针柱403,使定位针柱403向下移动;
S8、第一次路径加工代码执行完毕后,抬起第一拨动头302,将第二拨动头303切换到工作位置,执行第二次路径程序代码,第二次路径程序代码的路径密度大于第一次路径加工代码的路径密度;
S9、第二拨动头303拨动路径上的定位针柱403并使定位针柱403下移,二次路径程序代码执行完毕后,抬起第二拨动头303;
S10、利用第一相机8和第二相机9拍照,检测定位针柱403下降高度,将不同定位针柱403的高度值与理论数据比对,若正确则旋转调整顶丝410,加大气腔405中气压,锁紧定位针柱403;
S11、取下阵列针板4,将阵列针板4放到定型装置上,定位针柱403下端下压定型装置,使定型装置形成一定形状;
S12、将定型装置通过高压蒸汽,环氧乙烷等消毒方式消毒灭菌后取出备用;
S13、将主动脉支架放在定型装置中,标记主动脉支架在分支口的位置;
S14、直接在标记位置开窗或取出主动脉支架并在标记位置开窗。
上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
- 快速可复用结构成型装置及方法
- 纳微结构件快速成型装置及快速成型方法