一种面向传统码头的智慧化改造设计方法
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及码头改造技术领域,特别是一种面向传统码头的智慧化改造设计方法。
背景技术
随着集装箱船的大型化,集装箱码头面临吞吐量急剧增加的巨大压力,加之劳动力成本增加和劳动力资源匮乏,以及环保理念深入人心,降低运行成本、提高作业效率、提升客户服务满意度的软环境建设成为提高竞争力的重要手段,自动化、智慧化是集装箱码头未来发展的重要方向。近年来,国内青岛、厦门、洋山等自动化码头投入商业运营,剩余的大部分集装箱码头在信息技术的应用上主要为三种情况:一是采用先进的管理信息系统提升集装箱码头的业务管理水平,如采用国内外知名码头系统软件等;二是逐步以自动化技术取代人工操作,如电子数据交换、定位系统技术等;三是通过应用新技术提高码头作业效率,如智能配载算法、堆场计划以及无线数据终端技术等。
根据国家政策、港口调研和市场反馈分析,未来新建全自动化码头将越来越少,港口未来更多的需求将集中在自动化堆场改造、水平运输关键环节优化以及仿真决策技术的应用方面,因此,不断提高对港口已有信息化系统自动化改造能力和水平运输系统优化能力,以优化提升港口的基础设施和管理模式,实现港口的功能创新、技术创新和服务创新,是未来应主要考虑的研究方向。
从我国沿海港口的发展趋势来看,港口核心优势正在由水深、泊位、设备等硬件设施规模与等级的竞争,向着以技术、信息和综合物流服务为特征的软实力竞争方向发展。现有中小型集装箱码头也将朝着投资规模小、技术成熟、实施周期短、见效快的“传统岸桥+集卡+ARMG的自动化堆场”模式发展,而大型海港将逐步改造为“自动化岸桥+AGV/新能源无人车+ARMG”的模式;除装卸设备自动化更新外,随着近年来不同码头工艺的采用随之而来的无人车自动充电、拆解锁过程管控、码头内外部(有人、无人)车辆集中管理等问题均是当前需要重点关注解决的问题。
发明内容
本发明所要解决的技术问题是针对现有技术的不足,提供一种设计合理、对现有码头改造程度小、实现容易、实用性高的面向传统码头的智慧化改造设计方法。
本发明所要解决的技术问题是通过以下的技术方案来实现的。本发明是一种面向传统码头的智慧化改造设计方法,该方法针对传统码头改造的关键业务环节进行设计改造,其内容如下:
(1)工艺
针对不同码头生产、业务的具体情况选择合适的工艺与码头布局,进行岸桥、场桥作业区域、水平运输作业区、自动充电区、拆解锁作业区的设计与规划,明确码头端/边装卸作业模式,进行港机设备单/双小车装卸作业方式选型,进行场区内车道和通行规则制定;
(2)水平运输无人车
根据码头自身吞吐量、工艺和运营情况进行车辆适配,适配的车辆为无人车,无人车的导航方式包括磁钉、GPS和激光雷达,无人车的运动模式包括自主规划式、下发路线式和动作分解式,无人车的类型包括AGV、IGV、无人集卡、全自动跨运车;
(3)码头车辆作业管控
对车辆进行任务管理、路径规划、交通管制,同时基于不同车辆管控系统间信息实时交互,进行车辆通行状况预判,以此达到不同车辆任务的动态调整;
(4)集装箱自动拆解锁
通过设计配置自动拆解锁系统的方式提高作业效率,自动拆解锁系统包括拆解锁平台、拆解锁机器人、锁库、位置识别系统和拆解锁管控系统,用于对集装箱锁销进行自动拆卸;
(5)数字孪生:
基于数字孪生技术建立目标码头的虚拟化系统实现虚实联动,同时重点开展基于数字孪生码头的仿真分析与决策验证技术研究,并且,基于码头实际固有数据驱动虚拟系统进行自主充电策略、车辆通行策略、闸口控制策略、设备调度策略、堆场计划、船舶配载等策略的验证与优化,形成闭环反馈指导码头改造规划和运营策略的制定。
本发明所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的面向传统码头的智慧化改造设计方法,在内容(1)的工艺改造设计中,若无人车辆与外集卡完全隔离作业,则不进行改造设计。
本发明所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的面向传统码头的智慧化改造设计方法,在内容(1)的工艺改造设计中,若无人车辆与外集卡半隔离作业,则在交叉通行区域通过设置闸口并结合开放闸策略的方式解决无人车和外集卡的混行问题。
本发明所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的面向传统码头的智慧化改造设计方法,在内容(1)的工艺改造设计中,若无人车辆与外集卡不隔离作业,则强化无人车优先原则,在交叉口设置红路灯和闸口装置,结合车路协同技术实现对无人车和外集卡的车序控制、诱导控制和通行控制。
与现有技术相比,本发明的显著优点:
(1)考虑到当前国内外新建码头越来越少,以及传统集装箱码头的智慧化改造需求迫切,针对性梳理了传统集装箱码头改造面临的问题和改造建设任务,系统性强,覆盖面广,对码头改造提供依据和指导;
(2)基于常见集装箱传统码头的堆场边装卸工艺,创新性提出了适用于水平运输系统无人车和外集卡混合作业的通行模式,即完全隔离作业、半隔离作业和完全混合作业三种模式,并针对性给出解决思路,对现有码头改造程度小、实现容易、实用性高;
(3)针对当前未成熟产品化的AGV/IGV/无人集卡进行对比,提供选型依据,为无人车和外集卡、其他作业车辆等多车作业设计了集中管控思路,基于不同车辆管控模块间信息实时交互,进行车辆通行状况预判,以此达到不同车辆任务的动态调整。
附图说明
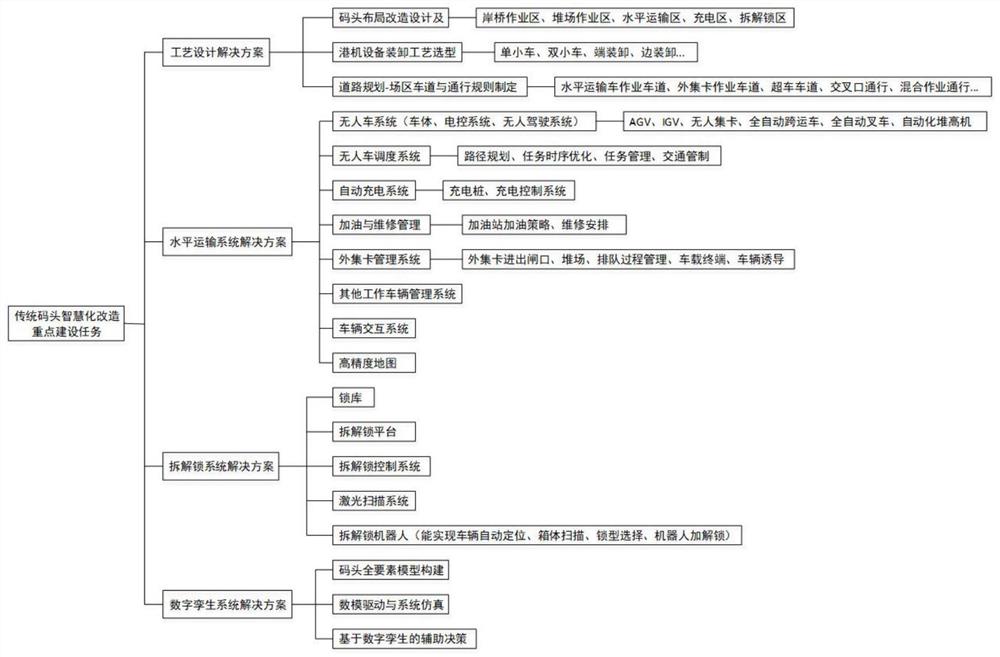
图1为本发明的任务示意框图;
图2为本发明的码头无人车与外集卡完全隔离作业示意图;
图3为本发明的码头无人车与外集卡半隔离作业示意图;
图4为本发明的码头无人车与外集卡完全混合作业示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参照图1-4,本发明是一种面向传统码头的智慧化改造设计方法,面向传统集装箱码头,重点梳理并分析了码头改造可能面临的各种问题,并针对性给出相应解决思路。传统码头的智慧化改造建设任务主要包括:码头工艺设计与解决方案、装卸设备改造解决方案、水平运输系统解决方案、全码头网络设计解决方案、智慧照明解决方案、能源管控解决方案、监控系统解决方案和数字孪生系统解决方案;
其中,工艺设计解决方案主要包括码头布局改造设计、港机设备工艺选型、码头内部道路规划;装卸设备改造解决方案主要包括岸桥和场桥的自动化改造;水平运输系统解决方案主要包括无人车系统、无人车调度系统、拆解锁系统、自动充电/换气系统、加油与维修管理、外集卡管理系统、其它场内车辆管理系统、车辆交互系统与高精度地图;全码头网络设计解决方案主要包括场区内有线和无线组网;智慧照明解决方案主要包括照明灯具选型和照明综合管控系统;智慧闸口解决方案主要包括闸道硬件设计、智能闸口管理系统;能源管控解决方案主要包括能源分类统计、设备能耗回收利用和能耗分析;监控系统解决方案主要包括安防监控、环境监控和设备监控;数字孪生系统解决方案主要包括码头全要素模型构建、数模驱动与系统仿真和辅助决策。
本发明是针对传统码头改造的关键业务环节:工艺设计、水平运输系统设计、拆解锁系统设计和数字孪生系统设计提出了以下实践路线:
1、工艺方面:
针对不同码头生产、业务等具体情况选择合适的工艺与码头布局,进行岸桥、场桥作业区域、水平运输作业区、自动充电区、拆解锁作业区的设计与规划,明确码头端/边装卸作业模式,进行港机设备单/双小车装卸作业方式选型,进行场区内车道和通行规则制定,如水平运输无人车作业车道宽度、数量、方向设计,外集卡作业车道、其他作业车辆车道设计,超车车道、潮汐车道、单/双向车道、交叉口通行规则、不同类作业车混合通行规则(完全隔离作业/半隔离作业/混合作业)以及冲突解决策略的制定;
(1)基于所设计的工艺(由于端装卸简单,故以常见的边装卸为例),若无人车辆与外集卡完全隔离作业,即按照堆场之间作业车道的奇偶数设计无人车路线和外集卡路线的作业区域,车辆可在本堆场间车道内掉头(双向行驶),每个泊位船头船尾所对应的左右垂直经线道路也划定为无人车主干道和外集卡主干道,作业路线无交叉,两者各行其道,完全隔离,不存在安全问题;
(2)基于所设计的工艺(由于端装卸简单,故以常见的边装卸为例),若无人车辆与外集卡半隔离作业,即按照堆场之间作业车道的奇偶数设计无人车路线和外集卡路线的作业区域,车辆在本堆场间车道内单向行驶,部分堆场进出口处会出现交叉通行区域,将会存在车辆进出堆场排队现象,该区域可通过设置闸口并结合开放闸策略的方式解决无人车和外集卡的混行问题;
(3)基于所设计的工艺(由于端装卸简单,故以常见的边装卸为例),若无人车辆与外集卡不隔离作业,即两者完全混合通行作业,该模式非常复杂,应强化无人车优先原则,在交叉口设置红路灯和闸口装置,结合车路协同技术实现对无人车和外集卡的车序控制、诱导控制和通行控制。
2、水平运输无人车方面:
无人车车体导航方式有磁钉、GPS和激光雷达,运动模式有自主规划式、下发路线式和动作分解式,其类型有AGV、IGV、无人集卡、全自动跨运车等,其中AGV、IGV自动化程度更高,无人驾驶技术相对更成熟,无车头车尾的区别对水平运输车辆调度系统要求相对简单,灵活度高,但其成本较高,且多为电动,能耗较高,无人集卡价格低,目前多为油动,但其无人驾驶技术成熟度仍需进一步验证,市场上测试产品均需要安全员辅助,单向运行,灵活度相对低,对水平运输车辆调度系统要求更高,码头可结合自身吞吐量、工艺和运营情况进行车辆适配。
3、码头车辆作业管控方面:
除水平运输系统无人车外,码头内部作业车辆还包括外集卡和其他有人/无人车辆;无论车辆采用完全隔离作业、半隔离作业还是混合作业模式,均需要有相应的调度管控系统对车辆进行任务管理、路径规划、交通管制,同时基于不同车辆管控系统间信息实时交互,进行车辆通行状况预判,以此达到不同车辆任务的动态调整。
4、自动拆解锁方面:
目前船用集装箱锁销的使用情况十分复杂,锁销具体构造在国际上没有统一的标准;根据我国相关标准,集装箱锁销可以大致分为分体式、整体式、半自动式和全自动式,需要拆卸的集装箱锁销至少有6大类100余种;可通过设计配置自动拆解锁系统(拆解锁平台+拆解锁机器人+锁库+位置识别系统+拆解锁管控系统)的方式提高作业效率,自动拆解锁系统是以工业机器人为载体,通过位置识别系统获得目标位置,确定位置后,夹具拆解锁管控系统下发的拆卸任务,并将拆下的锁销放置在传送带上送至锁销框,完成一次自动化拆锁流程,提高作业效率;安装流程与之相反。
5、数字孪生方面:基于数字孪生技术建立目标码头的虚拟化系统实现虚实联动的同时,重点开展基于数字孪生码头的仿真分析与决策验证技术研究;码头的重点在运营,运营的关键在策略,基于码头实际固有数据驱动虚拟系统进行自主充电(油/气)策略、车辆通行策略、闸口控制策略、设备调度策略、堆场计划、船舶配载等策略的验证与优化,形成闭环反馈指导码头改造规划和运营策略的制定。
本发明的优点在于:
(1)考虑到当前国内外新建码头越来越少,以及传统集装箱码头的智慧化改造需求迫切,针对性梳理了传统集装箱码头改造面临的问题和改造建设任务,系统性强,覆盖面广,对码头改造提供依据和指导;
(2)基于常见集装箱传统码头的堆场边装卸工艺,创新性提出了适用于水平运输系统无人车和外集卡混合作业的通行模式,即完全隔离作业、半隔离作业和完全混合作业三种模式,并针对性给出解决思路,对现有码头改造程度小、实现容易、实用性高;
(3)针对当前未成熟产品化的AGV/IGV/无人集卡进行对比,提供选型依据,为无人车和外集卡、其他作业车辆等多车作业设计了集中管控思路,基于不同车辆管控模块间信息实时交互,进行车辆通行状况预判,以此达到不同车辆任务的动态调整。
本发明的实施效益:
面向传统集装箱码头系统的智慧化改造过程,梳理了码头局部/全局改造面临的工艺、设备、策略、算法、系统设计等相关任务,并针对改造过程关键的业务环节给出了工艺设计解决思路、水平运输系统无人化以及无人车与有人车辆混合作业解决思路以及数字孪生技术的应用思路,可直接应用与具体方案的编制,为集装箱码头智慧化建设和改造均提供了依据和指导,发明中相关设计现已在实际码头得到应用。
- 一种面向传统码头的智慧化改造设计方法
- 一种码头升级改造结构及码头升级改造施工方法