双闭环带应急复零功能的电驱减摇鳍
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及一种用于减少船艇横摇运动装置,特别是一种电驱减摇鳍。
背景技术
国外已有较多电驱减摇鳍产品,国内尚无成熟产品,但一般仅通过伺服电机自带的编码器实现角度闭环控制,由于电机减速器一体式连接的特性,难以在合适的位置再布置角度传感器,无法形成更加稳定的角度双闭环控制,无安全上的设计裕度,同时缺少机械鳍角指示,不利于调试使用;且当紧急情况全船失电时,电驱减摇鳍因其伺服电机抱闸特点,会自行锁定在运行角度影响船舶拖行运动,需要额外的手动装置进行解锁复零。
发明内容
为了克服现有电驱减摇鳍无法实现双闭环控制及应急复零功能,本发明提出一种新的电驱减摇鳍装置,通过伺服电机带动大传动比的行星轮减速器,产生较大的转鳍力矩,通过鳍轴带动鳍快速大角度摆动,实现减摇;利用行星轮减速器定制接口,安装特制的鳍角发送器,将减速器的运动通过鳍角发送器内定制的传动机构将运动引出至角度传感器处,同时在传动机构处布置手动转鳍接口,使电驱减摇鳍具备应急复零功能。
为实现上述目的,本发明的技术方案是:一种双闭环带应急复零功能的电驱减摇鳍,包括鳍轴组、支承座、行星轮减速器、鳍角发送器、伺服电机,所述伺服电机通过安装在支承座上的行星轮减速器连接鳍角发送器,所述行星轮减速器扭矩输出端连接鳍轴;所述伺服电机自带有编码器,鳍角发送器上设有角度传感器,所述编码器和角度传感器通过电控系统连接伺服电机,由电控系统输出控制信号驱动伺服电机及行星轮减速器输出扭矩,从而驱动鳍轴使鳍上下摆动,并通过伺服电机自带的编码器与鳍角发送器上的角度传感器反馈回来的角度信号,实现双闭环控制;所述鳍角发送器尾部设置有鳍轴应急复零的手动转鳍轴。
进一步,所述鳍角发送器包括从动轴,主动轴,行星轮减速器定制接口,角度传感器,涡轮蜗杆减速器,所述行星轮减速器通过行星轮减速器定制接口与主动轴连接,所述主动轴通过传动机构连接从动轴,所述从动轴与涡轮蜗杆减速器输入端相连接,所述涡轮蜗杆减速器的一个输出端连接角度传感器。
进一步,所述涡轮蜗杆减速器的另一个输出端连接鳍角表,用于实时显示转鳍角度。
进一步,所述涡轮蜗杆减速器输出端与行星轮减速器输出端的传动比为:。
进一步,所述传动机构由从动轮,同步带构成,所述主动轴通过同步带和从动轮连接从动轴。
进一步,所述行星轮减速器定制接口与行星轮减速器的扭矩输出端为同步传动,且所述行星轮减速器定制接口与行星轮减速器的扭矩输出端之间具有一个传动比。
本发明的有益效果是:
本发明在电驱减摇鳍轻量化集成化的基础上,能够实现双闭环角度控制,能够大幅提升控制效率;同时双闭环互为安全冗余设计,提升了系统可靠性;具备机械鳍角指示,与手动复零功能,能够保证装置在电气系统受损或失电状态下能够回复零位,综合提升电驱减摇鳍的系统稳定性与可靠性。
本发明在电驱减摇鳍的基础上利用与元器件的定制接口,通过设计专用的鳍角发送器的形式使电驱减摇鳍具备了双闭环控制与应急复零功能,增加了电驱减摇鳍系统的可靠性与稳定性。
附图说明
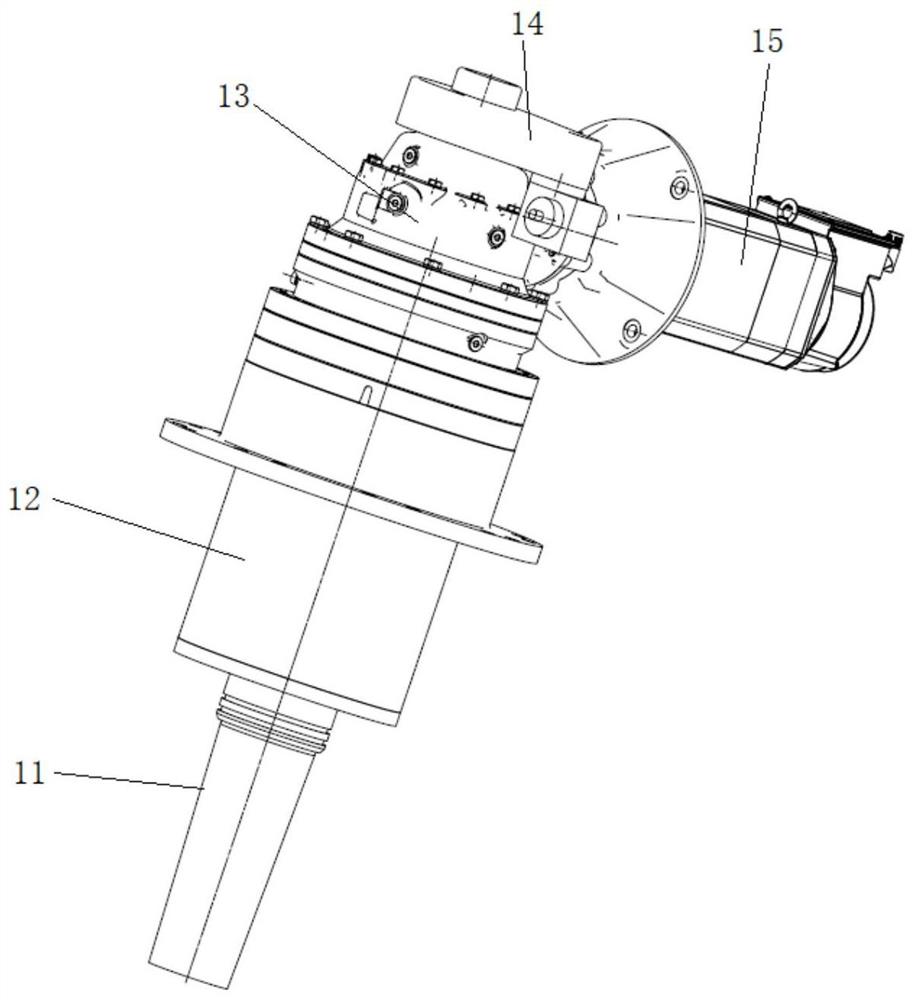
图1是本发明的电驱减摇鳍结构示意图;
图2是鳍角发送器结构示意图。
具体实施方式
下面结合附图与实施例对本发明作进一步说明。
如图1所示,本发明的电驱减摇鳍,主要由鳍轴组11、支承座12、行星轮减速器13、鳍角发送器14、伺服电机15等组成。伺服电机15通过安装在支承座12上的行星轮减速器13连接鳍角发送器14,行星轮减速器13扭矩输出端连接鳍轴。伺服电机15自带有编码器,鳍角发送1器4上设有角度传感器,编码器和角度传感器通过电控系统连接伺服电机15。由电控系统输出控制信号驱动伺服电机15及行星轮减速器13输出扭矩,从而驱动鳍轴使鳍上下摆动,并通过伺服电机15自带的编码器与鳍角发送器14上的角度传感器反馈回来的角度信号,实现双闭环控制。鳍角发送器14尾部布置有手动转鳍轴,通过鳍角发送器尾部的手动转鳍轴实现失电状态下的应急复零功能。
为实现电驱减摇鳍的双闭环及应急复零功能,需利用行星轮减速器尾部定制接口,将旋转运动由该接口处引出,通过特制的鳍角发送器实现双闭环及应急复零功能。
如图2所示,该鳍角发送器14主要由从动轮1,从动轴2,同步带3,保护罩4,主动轴5,行星轮减速器定制接口6,角度传感器7,涡轮蜗杆减速器8,鳍角表9组成。行星轮减速器13通过行星轮减速器定制接口6与主动轴5连接,主动轴5通过同步带3和从动轮1连接从动轴2,从动轴2与涡轮蜗杆减速器8输入端相连接,涡轮蜗杆减速器8的一个输出端连接鳍角表9,另一个输出端连接角度传感器7。
当伺服电机15驱动行星轮减速器13运转时,行星轮减速器定制接口6与行星轮减速器13的扭矩输出端为同步传动,但存在一定的传动比。通过主动轴5将该运动引出,并通过同步带3、从动轴2、从动轮1、涡轮蜗杆减速器8,将运动传递至涡轮蜗杆减速器8输出端。通过调整内部传动机构的传动比,使涡轮蜗杆减速器8输出端与行星轮减速器输出端的传动比为1:1,通过鳍角表9实时显示转鳍角度,通过角度传感器7与伺服电机15上的编码器共同实现电驱减摇鳍双闭环控制。
当全船失电时,伺服电机抱闸失电锁死,此时可通过应急直流电解锁抱闸,打开保护罩2,通过特制的专用手动转鳍工具转动主动轴5,根据鳍角表9上实时显示的机械角度,将鳍复零。
- 双闭环带应急复零功能的电驱减摇鳍
- 能变形自平衡的双电驱履带式多功能移动平台