三相永磁同步电机的初始位置辨识方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及永磁同步电机控制领域,具体涉及一种电机的初始位置辨识的方法。
背景技术
无速度或位置传感器的永磁同步电机是当前永磁同步电机研究的一个热点,是永磁同步电机驱动系统的发展趋势之一,具有潜在的竞争优势,但无速度或位置传感器的三相永磁同步电机和无刷直流电机的初始位置辨识也是学术界和工业界的难点。现有技术中,对于无速度或位置传感器的电机位置判断的技术主要分为两类:第一类是在启动的瞬间,注入脉冲序列,根据永磁电机的磁路饱和特性以及交直轴的磁阻不一致,而辨识电机的初始位置;第二类是采用高频注入的方案,根据电机的阻抗特性在高频时电阻的影响越来越小,电机的电感特性差异会显得很突出;例如中国专利CN102843091B公开了一种永磁同步电机转子初始位置的判断方法,首先利用脉振高频电压注入法得到初次估计的转子位置,然后在初次估计的交轴上注入一个正方向扰动信号,再估计转子位置,根据估计得到的转速方向判断磁极极性,得到电机转子初始位置;
上述两种类型的判断方法虽然实践中已有不少运用,但仍存在一些缺陷,例如注入脉冲序列的方式,其优点是辨识时间短也相对准确,但辨识的整个过程中电机必须静止不动,少许的扰动都会影响最终的位置准确性,特别是磁场极性(N/S极的判断)本身是磁路饱和来进行的,非常受电机扰动的干扰而做出误判,并且,辨识过程中会有一个明显的噪音,此外注入脉冲系列本身容易对电机位置产生移动。相应地,高频注入可以解决上述问题能够实现在线辨识,但辨识时间长、效率低、精度差,而且会产生高频噪音,启动力矩也小,注入的信号中很大部分注定用来辨识位置,而无法做功。
现有技术中也有一些其他的寻求方式,例如中国专利文献CN105958876A公开了永磁同步电机任意初始位置寻找方法,将电机三相线与逆变电路连接,根据电机负载状况和永磁同步电机旋转原理给定转矩T*;T*送入扭矩仲裁模块并满足电压方程式将上述公式化解为矩仲裁模块输出直轴电压ud*=0和交轴电压uq*=K×Udc;获取矢量变换角度θ;将得到的ud*和uq*和S5中提到的θ经过克拉克反变换和帕克反变换后送入空间矢量脉宽调制SVPWM得到各自功率开关管的开关状态最后经过逆变电路驱动电机motor达到初始位置定位的要求,但上述方案需要外接辅助电路并且需要启动电机,适用于电机在运行过程中的位置检测。
发明内容
本发明的目的是提供一种永磁同步电机的初始位置辨识方法,不需要注入高频脉冲或者脉冲序列也能够准确实现电机初始位置的判断。
为了实现上述目的,本发明提供以下技术方案:
三相永磁同步电机的初始位置辨识方法,包括以下步骤:
(1)在三相永磁同步电机启动瞬间发送适中频率的空间矢量脉宽调制,使三相永磁同步电机保持静止状态;
(2)根据空间矢量脉宽调制的命令角度,在开环角度的基础上实时进行Park变换,获得iq或id波形图;
(3)根据iq或id波形图的特殊值,获取三相永磁同步电机的转子特定位置,从而确定三相永磁同步电机的初始位置。
进一步地,所述空间矢量脉宽调制的正弦电压信号幅值满足能够使所述三相永磁同步电机在启动瞬间的堵转电流接近电机的额定电流。
进一步地,所述空间矢量脉宽调制的正弦电压信号频率满足能够使所述三相永磁同步电机在启动瞬间能保持静止状态。
进一步地,所述Park变换是指:所述空间矢量脉宽调制在开环控制的基础上,分别检测所述三相永磁同步电机的三相电流,对所述三相永磁同步电机的三相电流实时进行Park变换,得到所述三相电流的id或iq值。
进一步地,根据iq或id波形图的特殊值,获取三相永磁同步电机的转子特定位置的具体方法为:
(1)根据三相电流的id或iq值绘制id或iq波形图,其中横坐标为空间矢量脉宽调制的命令角度,纵坐标为id或iq值;
(2)确定波形图中连续的峰值和谷值所对应的命令角度,根据该命令角度确定电机转子在启动瞬间所在的位置角度,从而确定电机转子的初始位置。
本发明具有以下有益效果:
(1)本发明注入的信号是正弦波信号,无明显噪音,不依赖是否电机启动时是否处于转动状态,快速有效;
(2)本发明直接根据波形的特殊值,就可以判定电机的初始位置,使得判定方法简单快速;
(3)本发明注入的正弦波信号,对电机的转动也有制动作用,适用于不同的电机初始状态。
附图说明
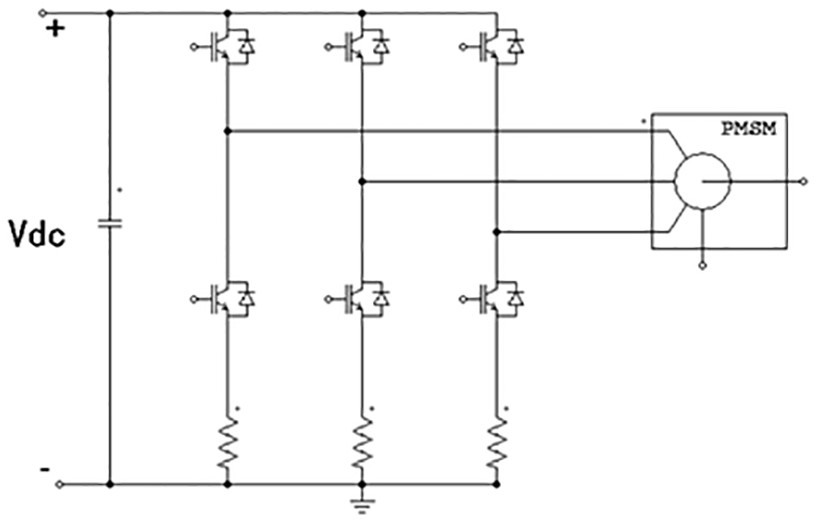
图1是本发明的三相全桥电路图。
图2是本发明的id和iq波形图。
具体实施方式
以下结合附图对本发明的具体实施方式做详细描述,应当指出的是,实施例只是对发明的具体阐述,不应视为对发明的限定,实施例的目的是为了让本领域技术人员更好地理解和再现本发明的技术方案,本发明的保护范围仍应当以权利要求书所限定的范围为准。
如图1所示,本发明的三相永磁同步电机的初始位置辨识方法包括以下步骤:
(1)在三相永磁同步电机启动瞬间发射适中频率的空间矢量脉宽调制,使三相永磁同步电机保持静止状态;
具体来说,
所述空间矢量脉宽调制的正弦电压信号幅值满足能够使所述三相永磁同步电机在启动瞬间的堵转电流接近电机的额定电流;
所述空间矢量脉宽调制的正弦电压信号频率满足能够使所述三相永磁同步电机在启动瞬间能保持静止状态。
(2)根据空间矢量脉宽调制的命令角度,在开环的基础上实时进行Park变换,分别检测所述三相永磁同步电机的三相电流,对所述三相永磁同步电机的三相电流实时进行Park变换,得到所述三相电流的id或iq值;
(3)根据iq或id波形图的特殊值,其中横坐标为空间矢量脉宽调制的命令角度,纵坐标为id或iq值;
(4)确定波形图中连续的峰值和谷值所对应的命令角度,根据该命令角度确定电机转子在启动瞬间所在的位置角度,从而确定电机转子的初始位置。具体来说,确定初始位置的方法如下:电机的q轴磁回路不经过磁钢,因为磁钢的磁导率接近于空气,所以q轴的磁回路有更多的磁链,导致电感Ld
- 三相永磁同步电机的初始位置辨识方法
- 一种永磁同步电机转子初始位置辨识方法