可视无线膝关节镜后交叉韧带重建胫骨定位器
文献发布时间:2023-06-19 11:34:14
技术领域
本发明涉及关节镜下后交叉韧带重建技术领域,具体涉及一种可视无线膝关节镜后交叉韧带重建胫骨定位器。
背景技术
后交叉韧带损伤是膝关节常见损伤方式,后交叉韧带损伤后,需要关节镜下重建后交叉韧带。
现有关节镜下后交叉韧带重建技术是先清理后交叉韧带残端,再在胫骨和股骨上建立用于自体移植物穿过的骨道。建立骨道过程中,首先需利用胫骨定位器定位导针,然后将空心钻沿导针方向钻通骨道,同时增加后内入路观察孔道,避免导针及钻头钻透皮质后,继续前进损伤膝后方重要血管及神经。
传统手术方式中问题:在整个后间室手术操作中,前方关节镜看不见术野,定位器全凭借术者的经验放置,很难判断是否解剖位置。在导针及空心钻钻透骨道时,增加后内辅助入路有助清理后交叉韧带残端,并可放置关节镜对导针和空心钻头进行观察,但镜头显露视野很难判断镜头位置及定位器位置,手术依然操作困难,同时创伤增加,手术时间长,操作繁琐,容易损伤重要血管及神经,增加了手术风险和难度。
发明内容
本发明针对现有技术上的不足,提出可视无线膝关节镜后交叉韧带重建胫骨定位器。本发明在重建骨道过程中,胫骨定位器自带视镜装置,可观察关节腔内状况,以及钻孔定位位置是否准确,当导针或钻头穿透骨皮质后,可以通过视镜监测钻头的位置,避免损伤后方重要血管及神经,并减少了术中器械操作的冲突,降低了手术风险和难度。
为了实现上述目的,本发明采用的技术方案是:
可视无线膝关节镜后交叉韧带重建胫骨定位器的组成:包括瞄准臂、手柄、导向套、导针、微型视镜装置、显示装置;所述手柄设有燕尾槽与导向孔,导向孔设于手柄下方,所述瞄准臂与手柄通过燕尾槽连接,瞄准臂可沿燕尾槽滑动伸缩,用锁紧轮与手柄固定,瞄准点位于导向孔的轴线上和瞄准臂的前端,位置始终保持不变,瞄准臂侧面刻有角度刻度,所述导向套位于导向孔内,与导针配合使用,所述微型视镜装置由微型摄像头、连接线缆、无线发射电路模块、发射天线、电池组成,所述显示装置由显示器与接收电路模块组成。
进一步地,所述瞄准臂前端为定位钩,定位钩前端设防护罩,可阻止导针或钻头继续前行,进一步避免损伤腘窝血管及神经,起到保护作用,瞄准臂后端设有电路板仓和电池仓两个腔体,腔体分别设有仓盖,瞄准臂前端与后端之间设有通孔连通。
进一步地,所述定位钩内置微型摄像头,其连接线缆穿过通孔与无线发射电路模块连接。
进一步地,所述微型视镜装置与显示装置之间通过无线信号连接,实时显示采集到的影像。
本发明具有的有益效果:
1、本发明把关节镜装置与定位器结合,不需传统的辅助后内入路,减少了手术创伤,缩短了手术时间;
2.在关节镜引导下,可以通过关节镜准确找到后交叉韧带的止点,保证骨道位置准确性;
3、通过关节镜可清晰看见导针及钻头穿透骨皮质,及时停止钻头工作,避免损伤腘窝血管及神经;
4、通过防护罩的保护,可阻止导针或钻头继续前行,进一步避免损伤腘窝血管及神经,起到保护作用;
5、视镜装置的无线发射电路模块与具有无线接收模块的显示器配合,实时显示术野情况。
附图说明
附图1是本发明的结构示意图。
附图2是本发明的右视图。
附图3是瞄准臂的主视图。
附图4是瞄准臂的右视图。
附图5是瞄准臂的剖视图。
附图6是瞄准臂的A向视图。
附图7是瞄准臂的M-M剖视图。
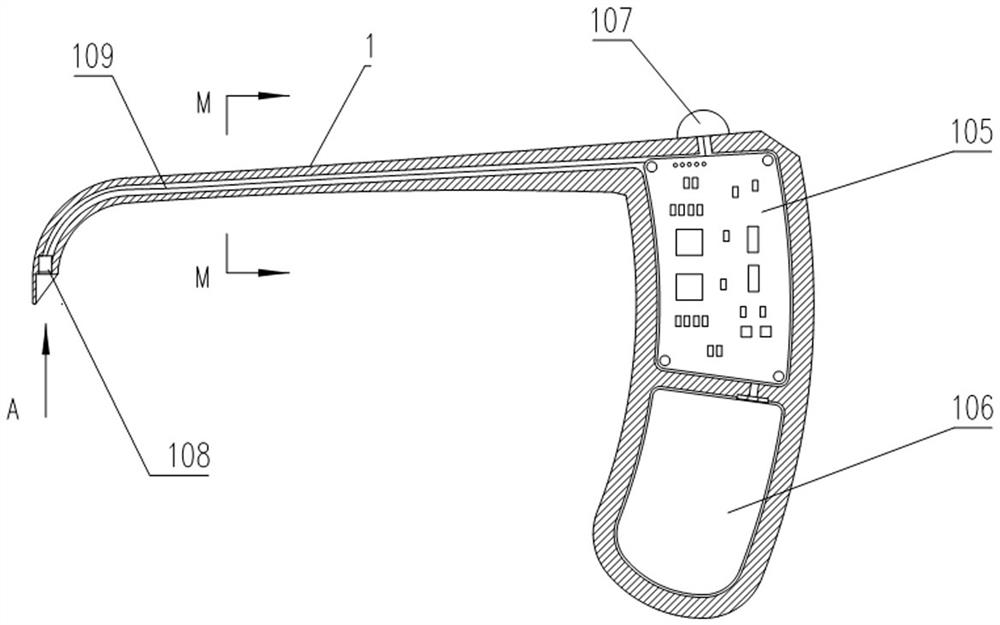
附图标记说明:1-瞄准臂,101-定位钩,102-电路板仓盖,103-电池仓盖,104-角度标线,105-无线发射电路模块,106-电池,107-天线,108-微型摄像头,109-连接线缆,2-手柄,201-锁紧轮,3-导向套,4-导针,5-显示装置。
具体实施方式
下面结合附图对本发明的技术方案做进一步的详细说明:
可视无线膝关节镜后交叉韧带重建胫骨定位器的组成:包括瞄准臂1、手柄2、导向套3、导针4、微型视镜装置100、显示装置5;所述手柄2设有燕尾槽与导向孔,导向孔设于手柄2下方,所述瞄准臂1与手柄2通过燕尾槽连接,瞄准臂1可沿燕尾槽滑动伸缩调整角度,调整好后用锁紧轮201与手柄2固定,瞄准点位于导向孔的轴线上和瞄准臂1的前端,瞄准点的位置始终保持不变,瞄准臂1侧面刻有角度刻度104,所述导向套3位于导向孔内,与导针4配合使用,导向套3用于保证导针4从瞄准点钻出,所述微型视镜装置100由微型摄像头108、连接线缆109、无线发射电路模块105、发射天线107、电池106组成,所述显示装置5由显示器与接收电路模块组成。
所述瞄准臂1前端为定位钩101,定位钩101前端为防护罩,可阻止导针或钻头继续前行,进一步避免损伤腘窝血管及神经,起到保护作用,瞄准臂1后端设有电路板仓和电池仓两个腔体,腔体分别设有仓盖,瞄准臂1前端与后端之间设有通孔连通。
所述定位钩101内置微型摄像头108,其连接线缆109通过通孔与无线发射电路模块105连接。
所述微型视镜装置100与显示装置5之间通过无线信号连接,实时显示采集到的影像。
具体使用时:
如附图所示,将瞄准臂1插入手柄2,根据设定角度调节好瞄准臂1角度,并用锁紧轮201锁紧固定,将电池106插到电池仓并打开电源开关,同时打开显示装置5的电源,微型视镜装置100与显示装置5之间建立无线连接,使微型视镜装置100采集的影像实时在显示器显示。
手术时清理后交叉韧带残端,将定位器瞄准臂1由前内或前外入路进入膝关节腔内,在关节镜指引下沿膝关节髁间进入,置于胫骨平台后髁下1.5—2厘米,并且贴附胫骨平台,沿微型视镜装置100找到后交叉韧带止点,将定位器固定,于导向孔内连接导向套3,由导向套3内打入导针4,在微型视镜装置100监测下,导针4透出骨皮质即刻停止工作。更换选定的空心钻,沿导针4打入空心钻,在微型视镜装置100监测下,空心钻头钻透骨皮质即可停止工作,后交叉韧带胫骨骨道建立完毕。
- 可视无线膝关节镜后交叉韧带重建胫骨定位器
- 可视后交叉韧带重建胫骨定位器