一种挖掘机动臂的自动夹紧机构
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及一种挖掘机加工工装,尤其涉及一种挖掘机动臂的自动夹紧机构。
背景技术
挖掘机作为工程机械中重要的一类,其对我国基础设施建设起着举足轻重的作用,且用途越来越广泛,甚至是逐步取代推土机等工程机械的作用。
挖掘机的动臂是挖掘机在挖掘作业时的主要受力部件,具有体积大、材质厚、质量重的特点。动臂焊接主要借助变位机进行作业,变位机需要专用夹具对工件进行夹持定位。目前常用的夹具1)油缸夹紧动臂两端或动臂中段;2)采用两块夹板座旋紧在一根双旋向螺杆上,通过手柄、导轨等部件实现夹板座的张合夹紧功能,手动控制松紧以便改变动臂的夹持位置。这种机构虽然能实现动臂的固定,但是兼容性差、换型麻烦、人工参与费时费力、夹紧位置靠人眼观察不可靠。
随着用户对产品焊接质量、焊接效率的要求越来越高,对焊接设备产品兼容性,生产柔性的需求不断提升,传统的动臂夹紧工装已不能满足要求。新型动臂焊接夹紧工装将成为常用工装,不仅具备传统的动臂夹紧定位功能,同时还具备兼容产品多种型号、自动控制、位置检测等功能。
现有技术一:
如图1所示,常州信息职业技术学院研制一种挖掘机动臂的夹紧机构,实现了动臂的手动夹紧。该机构包括底座、双旋向螺杆、两个相向的夹板座,在所述底座的两端有端盖板,所述双旋向螺杆的两端部分别可转动的支撑于两端盖板上,在其中一端盖板的外侧面有一与双旋向螺杆固定的手柄,在所述双旋向螺杆的两端分别有旋向相反的螺纹段,所述两个夹板座的底部的中间部位分别与双旋向螺杆的两个螺纹段螺纹连接,所述两个夹板座的底部的两端分别可滑动的支撑于底座上,且所述两个夹板座与底座之间可由穿过夹板座的锁紧件固定,在两夹板座相向的板面上分别有夹销。结构简单,很方便的松紧以便改变动臂的夹持位置,操作简单,节省了时间,提高了工作效率。
现有技术一的缺点:
该动臂夹紧工装手动操作,自动化程度低,费时费力;夹紧位置锁销定位易变形。
现有技术二:
如图2所示,齐齐哈尔二机床(集团)有限责任公司发明一种梯形丝杠对中液压夹紧装置,主要涉及机床制造业领域,数控龙门镗铣床、数控龙门组合铣床的工件夹紧装置。该梯形丝杠对中液压夹紧装置包括减速机,减速机带动两根左右旋滚珠梯形丝杠旋转,左右旋滚珠梯形丝杠的两端分别固定连接左托架及右托架,左托架及右托架分别位于左右旋滚珠梯形丝杠的上方,左托架上有夹紧块,夹紧块连接有夹紧油缸。缩短夹紧过程的时间,提高机床工件装夹效率,适应机床自动化高效率生产线的快速节拍。
现有技术二的缺点:
该装置采用电机减速机作为动力,在梯形丝杠托架上安装油缸夹紧工件,成本高,操作复杂。此装置主要用于机床制造业,应用范围有局限性。
发明内容
本发明的目的是提供一种挖掘机动臂的自动夹紧机构。
本发明的目的是通过以下技术方案实现的:
本发明的挖掘机动臂的自动夹紧机构,包括两个相向的锥销安装座,两个锥销安装座分别装有锥销,并分别通过导轨滑块与底板连接,并分别与安装在底板上的双旋向梯形丝杠连接;
所述梯形丝杠的一端装液压马达,另一端装编码器。
由上述本发明提供的技术方案可以看出,本发明实施例提供的挖掘机动臂的自动夹紧机构,利用液压泵作为动力,液压马达作为驱动,正反梯形丝杠为动力传递机构,配合仿形锥销、编码器、防护罩等配件实现动臂工件的两端定位和对中夹紧。此装置配合控制系统和变位机可实现根据工件尺寸自动调节装夹位置、配合RGV、变位机和控制系统实现工件的自动上下料及自动装夹、锥销和轴承配合优化工件异步升降中的摩擦损耗,极大提高动臂对中夹紧工装的效率、使用寿命、设备自动化率。
附图说明
图1为现有技术一的挖掘机动臂的夹紧机构结构示意图;
图2为现有技术二的梯形丝杠对中液压夹紧装置结构示意图;
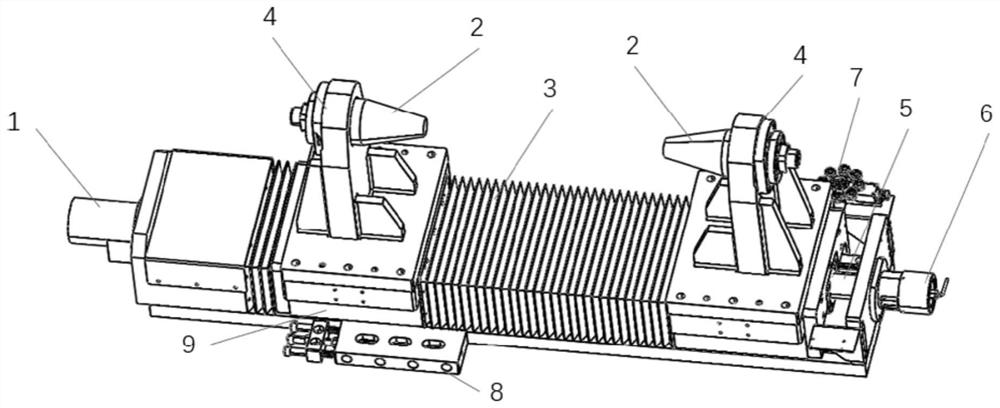
图3为本发明实施例提供的挖掘机动臂的自动夹紧机构结构示意图。
图1和图2中的附图标记为其在原申请文件中的标记,在本申请中无指代意义;
图3中:
1)液压马达,2)锥销,3)防焊渣风琴罩,4)轴承座(内装轴承),5)梯形丝杠,6)编码器,7)限位开关,8)调节块,9)导轨滑块。
具体实施方式
下面将对本发明实施例作进一步地详细描述。本发明实施例中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
本发明的挖掘机动臂的自动夹紧机构,其较佳的具体实施方式是:
包括两个相向的锥销安装座,两个锥销安装座分别装有锥销,并分别通过导轨滑块与底板连接,并分别与安装在底板上的双旋向梯形丝杠连接;
所述梯形丝杠的一端装液压马达,另一端装编码器。
所述导轨滑块和梯形丝杠设有防焊渣风琴罩。
所述液压马达与液压泵站连接,并设有液压自锁。
所述锥销和锥销安装座之间装有一对角接触轴承。
机构的一侧安装限位开关。
所述底板下侧装有调节块。
本发明的挖掘机动臂的自动夹紧机构,利用液压泵作为动力,液压马达作为驱动,正反梯形丝杠为动力传递机构,配合仿形锥销、编码器、防护罩等配件实现动臂工件的两端定位和对中夹紧。此装置配合控制系统和变位机可实现根据工件尺寸自动调节装夹位置、配合RGV、变位机和控制系统实现工件的自动上下料及自动装夹、锥销和轴承配合优化工件异步升降中的摩擦损耗,极大提高动臂对中夹紧工装的效率、使用寿命、设备自动化率。
具体实施例:
如图3所示,包括:液压马达1、锥销2、防焊渣风琴罩3、轴承座(内装轴承)4、梯形丝杠5、编码器6、限位开关7、调节块8、导轨滑块9。
该机构整体安装在底板上;两个相向的锥销安装座通过导轨滑块与底板连接,并与安装在底板上的双旋向梯形丝杠连接固定;梯形丝杠两端一端装液压马达另一端装编码器;导轨滑块和梯形丝杠用风琴罩防护防止焊渣和灰尘;锥销和锥销安装座之间装有轴承,可使锥销回转。
1)采用液压马达驱动梯形丝杠夹紧工件,动力采用液压马达和液压泵站,相比电机而言:
驱动采用液压泵站,启动时电网冲击小;
②液压马达体积功率比相对于电机而言小很多,动力若采用电机和减速机的搭配会占用很大的空间,影响工件上下料及在机器人焊接中降低工件两端焊缝的可达性;
③定扭矩下无极调速易实现,为保证工件上下料位置精度及上件的安全性,需慢速可调;
④带液压自锁,一定情况下可省去刹车装置,工件对中夹紧后,一般需配合变位机完成翻转,同步或异步升降等动作,此时自锁就非常重要;
⑤工作震动小,系统耐冲击负荷,提高整体结构的稳定性,及配合变位机或机器人工作的稳定性;
⑥工作可靠性高;
⑦梯形丝杠带自锁功能,保证工件夹紧后各种安全变位,将两个锥销安装座分别安装在梯形丝杠的正反两侧,滑块和导轨作为导向,液压马达作为动力,实现锥销安装座的相对移动。
2)在锥销和锥销安装座之间装有一对角接触轴承,在工件被两个锥销夹紧后,异步升降过程中,不会产生硬摩擦,极大提高了工装的使用寿命。在装置一侧安装限位开关7,作为行程保护。在工装底板下侧装有调节块8,对工装整体安装尺寸进行微调。
3)在梯形丝杠一端安装编码器6,通过编码器反馈判断锥销安装座的位置及夹具的夹紧位置判断。
本发明的有益效果:
(1)由于挖机产品工艺调整及更新换代,动臂会持续进行尺寸更改,目前动臂焊接夹紧工装尺寸单一,兼容工件种类尺寸较差。一种新型动臂液压对中夹紧工装合理解决以上问题。
(2)目前动臂焊接工作站工件上下料采用手动装夹,自动化程度低,效率低下,装夹过程浪费很多时间,影响整个焊接效率,此动臂液压对中夹紧工装可配合其它设备完成自动上下料,也可人工按钮快速完成装夹。
(3)工装整体结构紧凑、安全可靠、兼容性好,适用于所有的动臂对中夹紧定位。
本发明的技术关键点:
(1)由液压马达、正反梯形丝杠、编码器、仿形锥销、导轨滑块等组成,具有以下优点:工件尺寸兼容性多、自动化程度高、装夹稳定可靠、设备利用率高。
(2)适合于所有动臂型号装夹,不是针对某一种型号的动臂装夹。通过切换不同型号的装夹程序调整仿形锥销的距离,可以快速的切换不同型号的工件装夹。
(6)采用模块化设计,可根据需求进行定制组合。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。
- 一种挖掘机动臂的自动夹紧机构
- 一种挖掘机动臂的夹紧机构