一种滑扑式水下潜航器
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及潜航设备领域,具体是指一种滑扑式水下潜航器。
背景技术
水下潜航器是指通过远程遥控或自备程序控制的无人潜水装置,主要具有水下观测和水下作业的功能,但是现有的水下潜航器不能很好地适应复杂的水下环境并对水下环境进行自如稳定的观测,从而导致了图清晰度较差,不能很好的完成水下潜航器的观测功能,因此针对这种情况设计一种滑扑式水下潜航器。
发明内容
本发明要解决的技术问题是克服上述技术的缺陷,提供一种滑扑式水下潜航器。
为解决上述技术问题,本发明提供的技术方案为一种滑扑式水下潜航器:包括壳体、主推进器、辅推进器、主控制舱、探测灯控制室、仿生系统设备舱、仿生装置控制室和仿生装置,所述主推进器设置在壳体内部上端,所述主推进器的一端延伸出壳体,所述辅推进器设置在壳体内部主推进器的下方,所述辅推进器的一端延伸出壳体,所述主控制舱设置在壳体内主推进器的一侧,所述探测灯控制室设置在壳体内主控制舱的一侧,所述仿生系统设备舱设置在壳体内底部,所述仿生装置控制室设置在仿生系统设备舱内部一侧,所述仿生装置设置在壳体的下端,所述仿生装置上端和仿生装置控制室连接;
所述主控制舱内设有中央处理器,所述主控制舱内中央处理器的一侧设有电量检测模块,所述主控制舱内电量检测模块的下侧设有蓄电池;
所述仿生系统设备舱内下端设有进排水装置,所述仿生系统设备舱内进排水装置的上端设有水舱,所述仿生系统设备舱内水舱的上端设有收纳箱,所述仿生系统设备舱内收纳箱的一侧设有检测装置,所述检测装置和水舱连接,所述仿生系统设备舱内检测装置的下端设有收集器,所述检测装置和收集器连接;
所述仿生系统设备舱的一侧设有声呐,所述声呐和仿生装置控制室连接,所述仿生系统设备舱的上端设有定位器,所述仿生系统设备舱的上端定位器的一侧设有远程控制终端。
作为改进,所述壳体上端和下端均设有探测灯,所述壳体靠近探测灯控制室的壁上对应设有探测灯。
作为改进,所述壳体靠近探测灯控制室一侧壁的上半部对应设有水下摄像头,所述壳体下端设有水下摄像头。
作为改进,所述中央处理器和电量检测模块通过线路连接。
作为改进,所述电量检测模块和蓄电池通过线路连接。
作为改进,所述进排水装置和水舱通过管体连接。
作为改进,所述收纳箱和水舱通过管体连接。
作为改进,所述主推进器和辅推进器通过管体连接。
本发明与现有技术相比的优点在于:设有仿生装置可以很好近距离的观测,壳体侧端和下端均设有水下摄像头,可以更好的进行拍摄,壳体上端和下端均设有探测灯,壳体侧壁上对应设有探测灯,可以为水下摄像头的拍摄提供更充足的光源,使拍摄的图像更加清晰,设有检测装置,可以对水质等一些物体进行检测,设备体积小,能够方便实现狭小水域内的探测工作,续航时间久,可以满足大范围作业的水下推进器的仿生需求。
附图说明
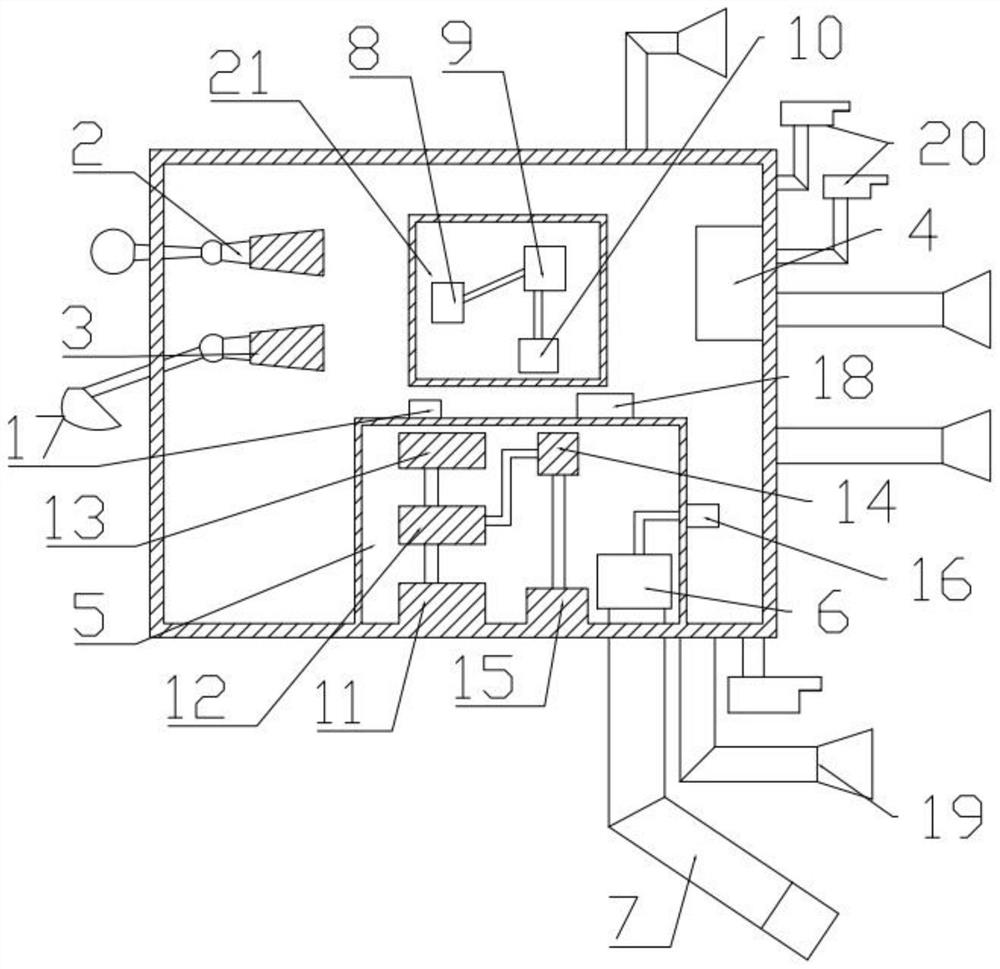
图1是本发明一种滑扑式水下潜航器的第一结构示意图。
图2是本发明一种滑扑式水下潜航器的第二结构示意图。
图3是本发明一种滑扑式水下潜航器的第三结构示意图。
如图所示:1、壳体,2、主推进器,3、辅推进器,4、探测灯控制室,5、仿生系统设备舱,6、仿生装置控制室,7、仿生装置,8、中央处理器,9、电量检测模块,10、蓄电池,11、进排水装置,12、水舱,13、收纳箱,14、检测装置,15、收集器,16、声呐,17、定位器,18、远程控制终端,19、探测灯,20、水下摄像头,21、主控制舱。
具体实施方式
下面结合附图对本发明一种滑扑式水下潜航器做进一步的详细说明。
结合附图1-3,一种滑扑式水下潜航器,包括壳体1、主推进器2、辅推进器3、主控制舱21、探测灯控制室4、仿生系统设备舱5、仿生装置控制室6和仿生装置7,所述主推进器2设置在壳体1内部上端,所述主推进器2的一端延伸出壳体1,所述辅推进器3设置在壳体1内部主推进器2的下方,所述辅推进器3的一端延伸出壳体1,所述主控制舱21设置在壳体1内主推进器2的一侧,所述探测灯控制室4设置在壳体1内主控制舱21的一侧,所述仿生系统设备舱5设置在壳体1内底部,所述仿生装置控制室6设置在仿生系统设备舱5内部一侧,所述仿生装置7设置在壳体1的下端,所述仿生装置7上端和仿生装置控制室6连接;
所述主控制舱21内设有中央处理器8,所述主控制舱21内中央处理器8的一侧设有电量检测模块9,所述主控制舱21内电量检测模块9的下侧设有蓄电池10;
所述仿生系统设备舱5内下端设有进排水装置11,所述仿生系统设备舱5内进排水装置11的上端设有水舱12,所述仿生系统设备舱5内水舱12的上端设有收纳箱13,所述仿生系统设备舱5内收纳箱13的一侧设有检测装置14,所述检测装置14和水舱12连接,所述仿生系统设备舱5内检测装置14的下端设有收集器15,所述检测装置14和收集器15连接;
所述仿生系统设备舱5的一侧设有声呐16,所述声呐16和仿生装置控制室6连接,所述仿生系统设备舱5的上端设有定位器17,所述仿生系统设备舱5的上端定位器17的一侧设有远程控制终端18。
所述壳体1上端和下端均设有探测灯19,所述壳体1靠近探测灯控制室4的壁上对应设有探测灯19。
所述壳体1靠近探测灯控制室4一侧壁的上半部对应设有水下摄像头20,所述壳体1下端设有水下摄像头20。
所述中央处理器8和电量检测模块9通过线路连接。
所述电量检测模块9和蓄电池10通过线路连接。
所述进排水装置11和水舱12通过管体连接。
所述收纳箱13和水舱12通过管体连接。
所述主推进器2和辅推进器3通过管体连接。
本发明在具体实施时,使用时,主推进器2和辅推进器3会推动设备移动,进排水装置11会中央处理器8的命令向水舱12中排水或抽出水舱12中的水,来调节设备的上升和下降,设有收纳箱13可以收集一种样本,设有检测装置14,可以对水舱12中的水进行检测,设有收集器15可以存放检测装置14检测的样本,设有电量监测模块9用于检测蓄电池10电量信息并将电量信息输送至中央处理器8,壳体1侧端对应设有水下摄像头20,壳体1下端设有水下摄像头20,壳体1上端和下端均设有探测灯19,壳体1侧端对应设有探测灯19,探测灯19可以为水下摄像头20提供光源,设有远程控制终端18,可以通过远程控制终端18来控制水下摄像头20进行拍摄。
以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种滑扑式水下潜航器
- 一种用于下潜的弃重装置及一种水下潜航器