一种共享汽车清洁度自动监测智能控制系统及其方法
文献发布时间:2023-06-19 11:52:33
技术领域
本发明属于共享汽车辅助设备及方法领域,特别涉及到一种共享汽车清 洁度监测及控制方法。
背景技术
共享汽车理念最早出现与20世纪四十年代的瑞士,瑞士人在全国组织 自驾车共享社。1997年,全球第一家汽车分时租赁公司ZipCar成立,标志 着汽车共享行业的萌芽;2011年,中国第一家分时租赁创业公司车厘子智 能成立。2014年,在互联网创业大军的追捧下,国内共享汽车迎来短暂爆 发,经过短暂的低潮后,在2017年国家发布《关于促进小微型客车租赁健 康发展的指导意见》,共享汽车正式获得国家认可,迎来二次爆发。数据显示,截止到2019年2月,中国已注册的共享汽车企业和单位已经超过1600 家,已经投入运营车辆11~13万辆,整体市场规模达到28.5亿元。据预测, 共享汽车行业仍会保持较为明显的增长趋势。
由于世界共享汽车行业二十世纪末才起步,我国更晚,共享汽车行业发 展时间较短,其后服务体系尚未形成,采用的仍是传统汽车后服务体系,存 在诸多不适。共享汽车行业普遍面临“重运营”的问题,对于共享汽车的调 度和运营维护,需要投入巨大的成本。究其原因是这些工作目前均需要由人 工完成,劳动力投入大,时间上限制性大。目前,针对汽车调度的研究有很 多,也有一些关于汽车故障检测的研究,但关于共享汽车清洁维护的研究几 近空白。本研究可以填补这一空白,推进并完善共享汽车调度和运营维护的 智能化。
与此同时,数据分析表明出行者对共享汽车舒适性、便利性、经济性和 时耗性的主观感知显著影响出行频率,且满意度越高使用共享汽车出行频 率越高。
目前,共享汽车存在车内卫生不好的情况,会影响用户的驾驶体验,减 少用户使用频率。共享汽车环境智能检测系统不仅仅是替代了人工,而且其 检测时间具有很大的任意性,可以及时反馈车辆的卫生问题,及时处理,切 实提高用户体验。
因此现有技术当中迫切需要一种解决上述问题的技术方案。
发明内容
本发明所要解决的技术问题是:要设计一套有效识别车内卫生环境并对 卫生条件做出判断,开发出一套可行的针对目前共享汽车清洁维护问题的智 能化检测装置,通过智能、自动化的设备来优化共享汽车公司在汽车维护上 的工作流程,进而实现减少人力成本的投入的目标。
一种共享汽车清洁度自动监测智能控制系统,其特征是:包括信息收集 装置、数据收发装置以及数据处理装置;
所述信息收集装置包括红外传感器及摄像传感器;
所述红外传感器包括5mm红外对管及Arduino UNO单片机;所述摄像传 感器包括RPI 8MP摄像头及Raspberry Pi 4 model B;
所述一组5mm红外对管的发射接收管平行,第二组5mm红外对管的发射 接收管不平行,第二组5mm红外对管的发射端和接收端的轴线相交在检测平 面上;
所述数据收发装置为汽车中控系统;
所述数据处理装置为云端计算机;
所述信息收集装置与数据收发装置数据连接,且数据收发装置与数据处 理装置数据连接。
所述红外传感器的其中一组5mm红外对管为GP2Y0A51SK0F测距传感 器,且GP2Y0A51SK0F测距传感器与检测平面预置1.5~2cm的间隙。
所述5mm红外对管的光路上设有凸透镜,用来汇聚红外线,增强5mm 红外对管的信号,提高污渍检测灵敏度。
共享汽车清洁度自动监测智能控制方法,其特征是,采用上述中任一的 一种共享汽车清洁度自动监测智能控制系统,包括以下步骤,且以下步骤顺 次进行
步骤一、开机数据采集,信息收集装置收集车内检测平面数据,其中摄 像传感器通过数据收发装置将采集到的检测图像发送到数据处理装置;
步骤二、红外传感器数据处理,红外传感器的Arduino UNO单片机处理 5mm红外对管收集到的数据,Arduino UNO单片机处理并且通过对5mm红外 对管工作与不工作时采集的信息求差值,排除太阳光中红外线对检测的影 响,得到灰尘污渍浓度,Arduino UNO单片机将得到灰尘污渍浓度通过数据 收发装置发送给数据处理装置;
步骤三、摄像传感器数据处理,装置处理摄像传感器采集到的检测图像, 数据处理装置通过使用差异哈希算法、图像相似度算法、背景减除算法处理 检测图像,得到采集检测图像中的检测图像判断数据,发送给数据处理装置;
步骤四、清洁度判断,数据处理装置的数据库中的标准数据与步骤二和 步骤三收到的内容进行比较,得出清洁度结果,若清洁度出现异常值,则将 信息发送至共享汽车公司,由公司安排清洁人员清洁。
所述步骤二中,红外传感器在一个工作周期内连续采集30组数据,选 取众数作为测量值,Arduino UNO单片机将测量值与系统所设定的阈值进行 比较,得出清洁度结果。
所述步骤四中,数据处理装置进行差异哈希判断、图像相似度判断,如 果两项判断结果满足数据处理装置中的阈值,系统得出清洁度结果,通知共 享汽车公司;如果两项判断结果不满足数据处理装置中的阈值,对数据进行 背景减除算法,得出清洁度结果;
所述差异哈希算法的阈值设为1.5,图像相似度算法的阈值设为0.9。
所述差异哈希算法的实现:
第一步:将待检测图像的大小调整为9*8,共72个像素,然后使用公 式(一)将待检测图像转换为灰度图像;
Gray=0.299R+0.587G+0.114B (一)
其中R、G、B:分别代表图像像素点的RGB值
其中Gray:灰度图像像素点灰度值
第二步:计算第一步中灰度图像中相邻像素灰度值的差值,若为正数或 0,则记为1,若为负数,记为0,得到一个由0和1组成的有序数列,即为 哈希值;
第三步:将第二步得到的哈希值与标准图像的哈希值比较得出汉明距 离。
所述图像相似度算法的实现:
第1步:计算待检测图像像素在R通道中的频率分布;
第2步:利用公式(二)和公式(三)计算直方图的相似总值,用像素 频率分布的长度除以相似总值,得到单通道下的图像相似度;
a
b
Degree
Degree:相似总值
第3步:按照上述方法,分别获得G,B通道直方图的相似性。将RGB 三个通道的处理结果的平均值作为待检测图像与标准图像的相似度,最终得 到图像相似度数值。
所述背景减除算法的实现:
第I步:对待检测图像和标准图像进行调整大小,并将其转换为灰度图 像;
第II步:将转化后的待检测图像和标准图像相减得到一个新图像;
第III步:用OTSU算法对这个新图像进行二值化处理,完成对异物轮 廓的识别。
本发明的有益效果如下:本发明提供了一种自动检测共享汽车内部环境 卫生的方法,能够取代人工检查,减轻共享汽车维护的劳动力成本;同时, 检测更加及时,可以提高共享汽车的环境卫生状况,检测更加便捷高效,可 以提高共享汽车的运营时间。
附图说明
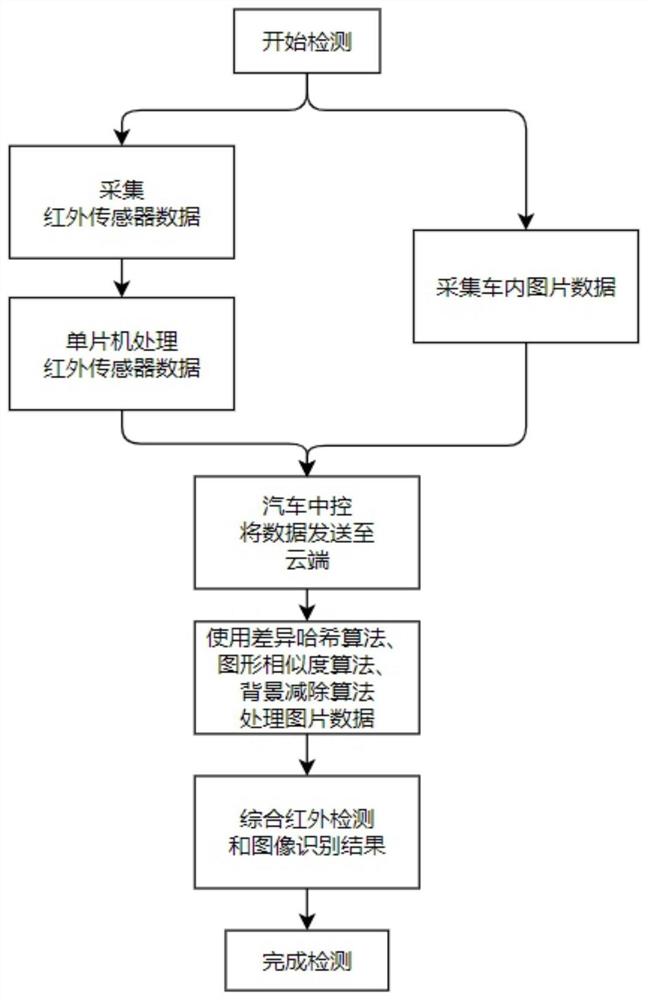
图1为本发明的流程图。
1-5mm红外对管、3-Arduino UNO单片机、4-RPI 8MP摄像头、5-Raspberry Pi4model B、6-汽车中控系统、7-云端计算机。
具体实施方式
下面结合附图及具体实施方式对本发明作进一步说明:
一种共享汽车清洁度自动监测智能控制系统,其特征是:包括信息收集 装置、数据收发装置以及数据处理装置;
所述信息收集装置包括红外传感器及摄像传感器;
所述红外传感器包括5mm红外对管1及Arduino UNO单片机3;所述摄 像传感器包括RPI 8MP摄像头4及Raspberry Pi 4model B5;
所述一组5mm红外对管1的发射接收管平行,第二组5mm红外对管1 的发射接收管不平行,第二组5mm红外对管1的发射端和接收端的轴线相交 在检测平面上;
所述数据收发装置为汽车中控系统6;
所述数据处理装置为云端计算机7;
所述信息收集装置与数据收发装置数据连接,且数据收发装置与数据处 理装置数据连接。
所述红外传感器的其中一组5mm红外对管1为GP2Y0A51SK0F测距传 感器,且GP2Y0A51SK0F测距传感器与检测平面预置1.5~2cm的间隙。
所述5mm红外对管1的光路上设有凸透镜,用来汇聚红外线,增强5mm 红外对管1的信号,提高污渍检测灵敏度。
Raspberry Pi 4model B5为树莓派;
共享汽车清洁度自动监测智能控制方法,其特征是,采用上述中任一的 一种共享汽车清洁度自动监测智能控制系统,包括以下步骤,且以下步骤顺 次进行
步骤一、开机数据采集,信息收集装置收集车内检测平面数据,其中摄 像传感器通过数据收发装置将采集到的检测图像发送到数据处理装置;
步骤二、红外传感器数据处理,红外传感器的Arduino UNO单片机3 处理5mm红外对管1收集到的数据,Arduino UNO单片机3处理并且通过对 5mm红外对管1工作与不工作时采集的信息求差值,排除太阳光中红外线对 检测的影响,得到灰尘污渍浓度,Arduino UNO单片机3将得到灰尘污渍浓 度通过数据收发装置发送给数据处理装置;
步骤三、摄像传感器数据处理,装置处理摄像传感器采集到的检测图像, 数据处理装置通过使用差异哈希算法、图像相似度算法、背景减除算法处理 检测图像,得到采集检测图像中的检测图像判断数据,发送给数据处理装置;
步骤四、清洁度判断,数据处理装置的数据库中的标准数据与步骤二和 步骤三收到的内容进行比较,得出清洁度结果,若清洁度出现异常值,则将 信息发送至共享汽车公司,由公司安排清洁人员清洁。
所述步骤二中,红外传感器在一个工作周期内连续采集30组数据,选 取众数作为测量值,Arduino UNO单片机3将测量值与系统所设定的阈值进 行比较,得出清洁度结果。
所述步骤四中,数据处理装置进行差异哈希判断、图像相似度判断,如 果两项判断结果满足数据处理装置中的阈值,系统得出清洁度结果,通知共 享汽车公司;如果两项判断结果不满足数据处理装置中的阈值,对数据进行 背景减除算法,得出清洁度结果;
所述差异哈希算法的阈值设为1.5,图像相似度算法的阈值设为0.9。
所述差异哈希算法的实现:
第一步:将待检测图像的大小调整为9*8,共72个像素,然后使用公 式(一)将待检测图像转换为灰度图像;
Gray=0.299R+0.587G+0.114B (一)
其中R、G、B:分别代表图像像素点的RGB值
其中Gray:灰度图像像素点灰度值
第二步:计算第一步中灰度图像中相邻像素灰度值的差值,若为正数或 0,则记为1,若为负数,记为0,得到一个由0和1组成的有序数列,即为 哈希值;
第三步:将第二步得到的哈希值与标准图像的哈希值比较得出汉明距 离。
所述图像相似度算法的实现:
第1步:计算待检测图像像素在R通道中的频率分布;
第2步:利用公式(二)和公式(三)计算直方图的相似总值,用像素 频率分布的长度除以相似总值,得到单通道下的图像相似度;
a
b
Degree
Degree:相似总值
第3步:按照上述方法,分别获得G,B通道直方图的相似性。将RGB 三个通道的处理结果的平均值作为待检测图像与标准图像的相似度,最终得 到图像相似度数值。
所述背景减除算法的实现:
第I步:对待检测图像和标准图像进行调整大小,并将其转换为灰度图 像;
第II步:将转化后的待检测图像和标准图像相减得到一个新图像;
第III步:用OTSU算法对这个新图像进行二值化处理,完成对异物轮 廓的识别。
红外传感器及摄像传感器数据收发装置以及数据处理装置
标准图像是在车辆清洁后获取的图像,是图像识别异物的判断依据,存 储于存储在数据处理装置中。
图像识别异物是将待检测图像从汽车中控系统上传到云服务器,在云服 务器上完成图像识别算法。如说明书附图。
最终检测结果包括:图像识别部分:差异哈希算法、图形相似度算法的 处理值,异物判断结果,背景减除法获得的异物轮廓图像。红外传感器部分: 异物检测和灰尘检测传感器数值,异物和灰尘判断结果。
汉明距离与图像相似度分别是差异哈希算法和图像相似度算法中用于 做出判断的数据,他们与异物的对应关系是一致的,但因为差异哈希判断和 图像相似度判断的原理不同,对不同物体的识别能力不同,反应在数值上也 有所差异,同时采用两种判断方法增强了系统对异物的识别能力,在一种方 法未识别异物时可能通过另一种方法将其检测出来。在进行背景减除算法之 前已经得出清洁度结果了,背景减除算法是为了获得关于被检出异物的更详 细的信息,背景减除算法将异物从环境中分离出来,可以得到异物的分布情况及各个异物的形状大小信息,这些信息也可供共享汽车公司使用,例如帮 助清洁人员快速定位异物在车内的位置。
关于红外传感器及摄像传感器的安装位置和检测范围是否需要说明,红 外传感器安装于汽车内部收纳盒底部,检测收纳盒中的异物及底部灰尘污 渍;摄像传感器位于汽车内顶部,前后排座椅中央上方各一个,且摄像传感 器能转动改变视角,用于获取车内大部分空间的图片信息。
- 一种共享汽车清洁度自动监测智能控制系统及其方法
- 共享汽车的控制方法、共享汽车控制系统及后台设备