一种用于三维动态测量设备的检测平台及其检测方法
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及测量设备检测技术领域,尤其涉及一种用于三维动态测量设备的检测平台及其检测方法。
背景技术
随着我国经济水平与科学技术的逐步提升,不断催生出各种各样高新技术,特别是在动态测量技术方面,取得了巨大的进步和非凡的成就。由于生产与实践的需求,三维动态测量技术在很多工程实践中都得到了广泛的应用,目前,三维动态测量技术的发展和应用呈现多元化趋势,其主要体现在测量手段、测量仪器以及应用领域等几个方面。现有的三维动态测量仪器品种繁多,功能各异,适用于不同环境的检测与测量,例如管线探测仪、多波束声呐或者频率记录仪等等。在动态测量过程中,往往对接收装置的精度有较高的要求,故测量仪器在投入使用之前,都需要对其进行核准和校验,以保证仪器的测量效果和测量精度,现有对测量装置的检测手段是通过选取多组已知的点位与测量装置所测量的数据值进行对比判断,但是,采用该种方法需要利用被检仪器进行多次测量,检测过程较为繁琐,投入成本较大,耗时耗力;且所测得数据较少,以部分数据很难判断测量装置的精准程度,故实用性较差。
发明内容
本发明的主要目的是解决现有技术中所存在的问题,提供一种用于三维动态测量设备的检测平台及其检测方法。
为解决上述技术问题,本发明采用的技术方案是:一种用于三维动态测量设备的检测平台,包括承托部件、连接于承托部件上的驱动部件、受驱动部件驱动而进行运动的位移部件、连接于位移部件并随其同步运动的接收器、控制驱动部件进行运动并与其电性相连的控制器、以及与控制器电性相连的轨迹生成模块,且所述接收器与一测量仪器电性相连;
所述驱动部件和位移部件均连接于承托部件上,所述位移部件的输入端连接于驱动部件的输出端,所述接收器连接于位移部件上,且该接收器与一测量仪器电性相连,所述控制器与驱动部件电性相连,所述轨迹生成模块电性连接于控制器。
进一步地,所述的驱动部件和位移部件构成曲柄摇杆结构,所述曲柄摇杆结构用于驱动接收器进行简谐运动。
进一步地,所述驱动部件包括连接座、连接于连接座上的伺服电机、连接于伺服电机输出端的轮盘、端部插设于轮盘上的偏心轴、以及与偏心轴转动相连的连杆,且所述连杆与位移部件相铰接。
进一步地,所述偏心轴距轮盘中心处的距离与连杆的长度之比小于1/9。
进一步地,所述轮盘自其圆心至边缘的方向均匀开设有多组装配孔,所述偏心轴固定插设于其中一组装配孔内。
进一步地,所述位移部件包括直线滑轨和滑块,所述直线滑轨连接于承托部件上,所述滑块相配合滑动连接于直线滑轨上,且该滑块与接收器相连接。
进一步地,所述承托部件设置为第一底座,所述驱动部件和位移部件均与第一底座相连接。
进一步地,所述第一底座上设置有长水平仪,所述长水平仪用于检测第一底座的平面度。
进一步地,所述承托部件包括第二底座和支撑框架,所述第二底座与支撑框架相连接,所述支撑框架分别与驱动部件和位移部件相连接。
进一步地,所述支撑框架的顶部设置有水准泡,所述水准泡用于检测支撑框架的平面度和直线度。
进一步地,所述承托部件上还设置有支撑杆,所述支撑杆的两端分别与第二底座和支撑框架相连接。
进一步地,所述支撑框架铰接于第二底座上,所述承托部件上设置有伸缩杆,所述伸缩杆的端部铰接于第二底座上,其活塞杆输出端铰接于支撑框架上,由所述伸缩杆对支撑框架进行稳定加固和倾角调节。
一种利用上述任意一项检测平台的检测方法,包括如下步骤:
步骤一:启动本装置,由驱动部件带动连接于位移部件上的接收器进行运动;
步骤二:由接收器对被检目标进行测量和数据采集,并将采集的数据传输至测量仪器;控制器对带动接收器进行运动的驱动部件进行信息采集,并将采集的信息反馈给轨迹生成模块,由轨迹生成模块得出接收器的运动轨迹曲线;
步骤三:将测量仪器上记录的数据与接收器的运动曲线轨迹进行对比,通过测量仪器记录的数据与运动轨迹曲线的偏差程度来对测量仪器的动态测量精度进行判断分析。
进一步地,步骤一中所述驱动部件的运动过程如下:
控制器控制伺服电机进行旋转,由伺服电机带动与其输出端相连接的轮盘进行转动,转动的轮盘带动偏心轴进行转动,由偏心轴带动与其转动相连的连杆进行运动,再由连杆带动与其端部相铰接的位移部件进行简谐运动;
进一步地,步骤一中所述接收器的运动过程如下:
滑动设置于直线滑轨上的滑块在连杆的带动下进行往复的简谐运动,使得与滑块相连接的接收器随滑块一同进行简谐运动。
本发明具有的优点和积极效果是:
(1)本发明结构新颖,稳定可靠,驱动部件与位移部件之间构成曲柄摇杆结构,在伺服电机的作用下能够带动滑块和连接于滑块上的接收器沿直线滑轨进行简谐运动,利用轨迹生成模块得到连接于滑块上接收器的运动轨迹曲线;并利用随滑块进行简谐运动的接收器对被检目标进行数据采集,同时将采集的数据反馈给测量仪器进行记录,通过将接收器采集的数据与接收器运动的运动轨迹曲线进行对比,来评判测量仪器的动态测量精度,若两者之间的偏差越小,则测量仪器的精准度越高;若两者之间偏差越大,则精准度越差;且本装置性能稳定,可控性好,可一次性采集大量数据,极大的节省了检测时间,节约了大量的人力物力,降低了检测成本,有效的提高了检测效率;且本装置能够提供充足的数据,对比性较好,便于对实测数据与真实数据进行比较,因此检测的准确度较高;
(2)通过在承托部件上长水平仪和水准泡,能够在检测之前对本装置进行校准,保证第一底座和第二底座在水平状态上的平面度,确保支撑框架能够处于竖直状态,降低因装置自身平面度和垂直度对检测结果所造成的干扰与影响,提高设备检测的精准度;
(3)通过于轮盘圆心至边缘的方向均匀开设有多组装配孔,方便偏心轴的安装,同时也便于对偏心轴距轮盘中心的距离进行调节,使轮盘能够提供不同长度的旋转半径,进而使得装置能够模拟不同振幅的简谐运动,提高其实用性;
(4)通过调节伸缩杆的活塞杆的长度,能够调节铰接于第二底座上的支撑框架的倾斜角度,扩大了装置的检测范围,使接收器能够在不同倾角的的状态下对被测目标进行数据测量,以提高对测量仪器测量水平的检测效果。
附图说明
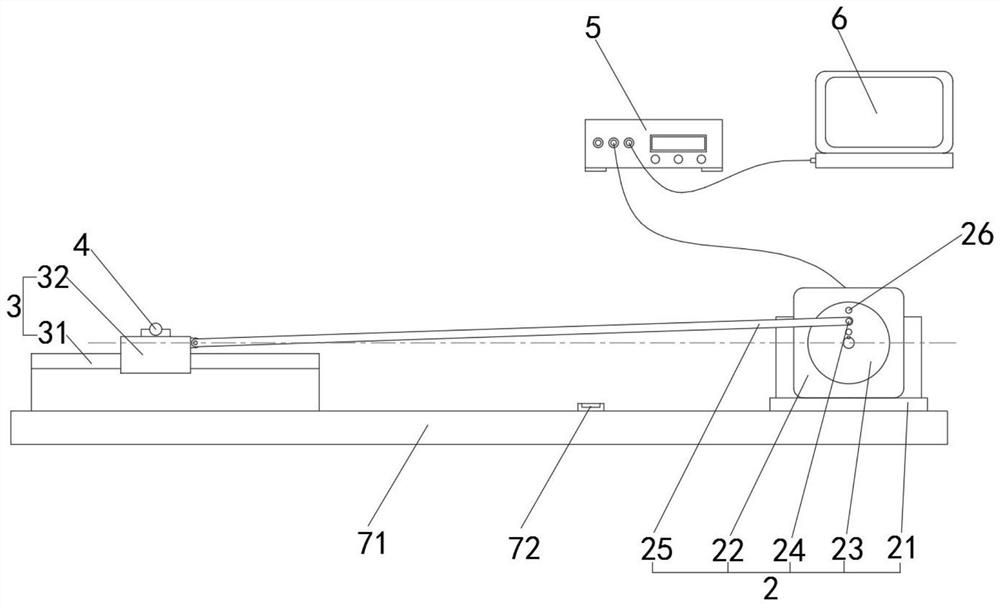
图1是实施例1中本发明的结构示意图;
图2是实施例2中本发明的结构示意图;
图3是实施例3中本发明的结构示意图;
图4是驱动部件的结构示意图;
图5是滑块进行简谐运动的原理示意图;
图6是滑块的运动轨迹曲线示意图;
图7是伺服电机和轨迹生成模块与控制器之间的电性控制关系框图;
图8是接收器与测量仪器之间的电性控制关系框图。
图中:2、驱动部件;21、连接座;22、伺服电机;23、轮盘;24、偏心轴;25、连杆;26、装配孔;3、位移部件;31、直线滑轨;32、滑块;4、接收器;5、控制器;6、轨迹生成模块;71、第一底座;72、长水平仪;81、第二底座;82、支撑框架;83、水准泡;84、支撑杆;9、伸缩杆。
具体实施方式
为了更好的理解本发明,下面结合具体实施例和附图对本发明进行进一步的描述。
实施例1
如图1、图7和图8所示,一种用于三维动态测量设备的检测平台,包括承托部件、连接于承托部件上的驱动部件2、受驱动部件2驱动而进行运动的位移部件3、连接于位移部件3并随其同步运动的接收器4、控制驱动部件2进行运动并与其电性相连的控制器5、以及与控制器5电性相连的轨迹生成模块6,且接收器4与一测量仪器电性相连;驱动部件2和位移部件3均连接于承托部件上,位移部件3的输入端连接于驱动部件2的输出端,接收器4连接于位移部件3上,且该接收器4与一测量仪器电性相连,控制器5与驱动部件2电性相连,轨迹生成模块6电性连接于控制器5,由于驱动部件2与控制器5电性相连,控制器5能够控制驱动部件2带动位移部件3进行运动,使得位移部件3带动接收器4进行运动,接收器4在运动过程中,会不断对被检目标进行测量和数据采集,并将接收器4所采集数据传输至测量仪器中,由测量仪器进行显示记录;同时,轨迹生成模块6通过控制器5得出连接于滑块32上接收器4的运动轨迹曲线,将滑块32运动轨迹曲线上的数值和测量仪器所记录的数值进行对比分析;测量仪器上的数据与滑块32运动轨迹曲线上的数据值越接近,则该测量仪器的测量精度越高,若两组数据之间存在一定的差异,则证明该测量仪器测量精度存在一定的偏差,偏差越大,则测量仪器的测量效果越差。
具体地,用于承载接收器4的位移部件3受驱动部件2进行轨迹可控的线性移动,根据驱动部件2对位移部件3的驱动模式,由轨迹生成模块6计算生成接收器4的真实运动轨迹;其中轨迹可控是指通过驱动进行圆周运动和直线运动等可测量的规则性线性运动,其运动轨迹可现通过现有技术计算得出。
如图1和图4所示,驱动部件2和位移部件3构成曲柄摇杆结构,曲柄摇杆结构用于驱动接收器4进行简谐运动,驱动部件2包括连接座21、连接于连接座21上的伺服电机22、连接于伺服电机22输出端的轮盘23、端部插设于轮盘23上的偏心轴24、以及与偏心轴转动相连的连杆25,且连杆25与位移部件3相铰接,伺服电机22在转动过程中会带动轮盘23进行转动,使得轮盘23带动插设于轮盘23上的偏心轴24进行转动,由偏心轴24通过连杆25带动位移部件3进行运动,使得位移部件3带动接收器4进行简谐运动,轮盘23自其圆心至边缘的方向均匀开设有多组装配孔26,偏心轴24固定插设于其中一组装配孔26内,为了模拟不同振幅的简谐运动,可通过调节偏心轴24与轮盘23中心的距离来进行调节,以扩大本装置的检测范围。
如图1所示,位移部件3包括直线滑轨31和滑块32,直线滑轨31连接于承托部件上,滑块32相配合滑动连接于直线滑轨31上,且该滑块32与接收器4相连接,驱动部件2中的连杆25带动滑块32进行运动,使得滑块32和连接于滑块32上的接收器4沿直线滑轨31不断的进行往复的简谐运动,且滑块32在进行简谐运动时,控制器5将驱动部件2和接收器4的运动信息传输至轨迹生成模块6,由轨迹生成模块6得出连接于滑块32上接收器4的运动轨迹曲线,以便与测量仪器所记录的数据进行对比。
如图1所示,承托部件设置为第一底座71,驱动部件2和位移部件3均与第一底座71相连接,使得位移部件3中的滑块32在伺服电机22和连杆25的带动,与水平方向上进行简谐运动,以使接收器4能于水平方向进行数据采集,同时,第一底座71上设置有长水平仪72,长水平仪72用于检测第一底座71的平面度,保证装置在检测过程中的检测效果。
实施例2
如图2所示,与实施例1的区别在于,承托部件设置为第二底座81和支撑框架82,第二底座81与支撑框架82相连接,支撑框架82分别与驱动部件2和位移部件3相连接,通过将驱动部件2和位移部件3固定于支撑框架82上,以使位移部件3中的滑块32沿竖直方向进行简谐运动,支撑框架82的顶部设置有水准泡83,水准泡83用于检测支撑框架82的平面度和直线度,以保证支撑框架82处于垂直状态,确保在装置在竖直方向上的检测结果,承托部件上还设置有支撑杆84,支撑杆84的两端分别与第二底座81和支撑框架82相连接,以使支撑框架82得到加固。
实施例3
如图3所示,与实施例1和实施例2的区别在于,支撑框架82铰接于第二底座81上,承托部件上设置有伸缩杆9,伸缩杆9的端部铰接于第二底座81上,其活塞杆输出端铰接于支撑框架82上,由伸缩杆9对支撑框架82进行稳定加固和倾角调节,根据实际的检验需求来调节伸缩杆9中活塞杆的长度,进而调节支撑框架82与第二底座81之间的夹角,以使装置于不同倾角的状态下对测量仪器的动态测量性能进行追踪。
另外,在上述所有实施例中,位移部件3中的滑块32在驱动部件2的带动下沿直线滑轨31进行简谐运动,偏心轴24距轮盘23中心处的距离与连杆25的长度之比均小于1/9,以保证滑块32始终进行简谐运动,以实施例1为例,进行如下说明:
如图5所示,设A为滑块32中心,B为偏心轴24与连杆25之间的连接点,O为轮盘23的中心,α为曲柄转角,β为连杆25摆角。R为曲柄半径,L为连杆25长度,s为滑块32的中心A的位移。当驱动部件2进行运动时,滑块32沿直线滑轨31做往复运动,曲柄以角速度ω旋转,带动连杆25于平面做复合运动。
如图5所示,驱动部件2带动滑块32进行往复运动,当α=0°时,滑块32的中心A止于直线滑轨31上的一点,设该点为A
根据上述的空间关系可得滑块32的中心A的位移s为:
s=R+L-(Rcosα+Lcosβ)
同时,由图可知Rsinα=Lsinβ,故可以得出
若设λ=R/L,根据二项式定理将式将展开后得到:
s=R+L-R(cosα+η
其中:
从上述公式可以得到,滑块32的中心A的位移s不是做简谐振动,但在方程计算过程中,高次项的取舍对取值有很大的影响,在航空发动机领域当中,λ的取值范围在1/3.8~1/3.2之间,高于λ
同时,为了模拟不同振幅的简谐运动,可以通过将偏心轴24插设于轮盘23上不同的装配孔26来调节曲柄结构的半径,满足实际需求,并依照λ小于1/9设计要求进行检测。
另外,上述所涉及的连接座21与伺服电机22之间、第一底座71与连接座21之间、长水准仪与第一底座71之间、水准泡83和支撑框架82之间、第二底座81与支撑框架82之间等均可采用螺栓进行连接,支撑杆84与第二底座81之间可采用焊接的方式进行连接;其中伸缩杆9可采用阻尼伸缩杆,轨迹生成模块6可采用计算机终端进行替代,且长水准仪、水准泡83、伺服电机22、轨迹生成模块6、接收器4、测量仪器以及伸缩杆9的具体结构和工作原理均属于本技术领域现有技术,本申请未对其进行改进;同时,上述中的轨迹生成模块6和伺服电机22与控制器5之间、测量仪器与接收器4之间的电性连接原理、电性控制关系和电性连接方式均属于本技术领域现有技术,申请未对其进行改进,故不再赘述。
本发明结构新颖,稳定可靠,驱动部件2与位移部件3之间构成曲柄摇杆结构,在伺服电机22的作用下能够带动滑块32和连接于滑块32上的接收器4沿直线滑轨31进行简谐运动,利用控制器5和轨迹生成模块6得到连接于滑块32上接收器4的运动轨迹曲线;并利用随滑块32进行简谐运动的接收器4进行数据采集,同时将采集的数据反馈给测量仪器进行记录,通过将测量仪器所记录的数据与接收器4的运动轨迹曲线进行对比,来评判测量仪器的动态测量精度,若两者之间的偏差越小,则测量仪器的精准度越高;若两者之间偏差越大,则精准度越差;且本装置性能稳定,可控性好,可一次性采集大量数据,极大的节省了检测时间,节约了大量的人力物力,降低了检测成本,有效的提高了检测效率;且本装置能够提供充足的数据,对比性较好,便于对实测数据与真实数据进行比较,因此检测的准确度较高;通过在承托部件上长水平仪72和水准泡83,能够在检测之前对本装置进行校准,保证第一底座71和第二底座81在水平状态上的平面度,确保支撑框架82能够处于竖直状态,降低因装置自身平面度和垂直度对检测结果所造成的干扰与影响,提高设备检测的精准度;通过于轮盘23圆心至边缘的方向均匀开设有多组装配孔26,方便偏心轴24的安装,同时也便于对偏心轴24距轮盘23中心的距离进行调节,使轮盘23能够提供不同长度的旋转半径,进而使得装置能够模拟不同振幅的简谐运动,提高其实用性;通过调节伸缩杆9的活塞杆的长度,能够调节铰接于第二底座81上的支撑框架82的倾斜角度,扩大了装置的检测范围,以使接收器4能够在不同倾角的的状态进行检测;以实施例1为例,本发明的具体工作原理如下:
1、在使用前,操作人员对装置进行安全检查,保证跟部分连接完整,确保其使用的安全性;
2、依次启动接收器4、测量仪器、控制器5和轨迹生成模块6,使接收器4、测量仪器、控制器5和轨迹生成模块6开始工作,调节控制器5,由控制器5控制驱动部件2进行运动,伺服电机22进行旋转时,由伺服电机22带动与其输出端相连接的轮盘23进行转动,转动的轮盘23带动偏心轴24进行转动,由偏心轴24带动与其转动相连的连杆25进行运动,再由连杆25带动与其端部相铰接的位移部件3进行运动;
3、驱动部件2带动连接于位移部件3上的测量仪器进行简谐运动,滑动设置于直线滑轨31上的滑块32在连杆25的带动下进行往复的简谐运动,使得与滑块32相连接的接收器4随滑块32一同进行简谐运动;
4、由接收器4对被检目标进行测量和数据采集,并将采集的数据传输至测量仪器;控制器5对带动接收器4进行运动的驱动部件2进行信息采集,并将采集的信息反馈给轨迹生成模块6,由轨迹生成模块6得出接收器4的运动轨迹曲线;
5、将测量仪器上记录的数据与接收器4的运动曲线轨迹进行对比,通过测量仪器记录的数据与运动轨迹曲线的偏差程度来对测量仪器的动态测量精度进行判断分析。
以上对本发明的实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明范围所作的均等变化与改进等,均应仍归属于本专利涵盖范围之内。
- 一种用于三维动态测量设备的检测平台及其检测方法
- 一种用于集成电路封装设备的检测平台及检测方法