测距装置、测距方法和程序
文献发布时间:2023-06-19 12:02:28
技术领域
本技术涉及一种测距装置、测距方法和程序,更具体地,例如,涉及一种能够抑制干扰的测距装置、测距方法和程序。
背景技术
近年来,半导体技术的进步导致了测量距物体的距离的测距装置的小型化。例如,这可以将测距装置安装在作为具有通信功能的小型信息处理装置的诸如智能电话等所谓的移动终端中。
测量距目标对象的距离的测距装置(传感器)的示例包括飞行时间(TOF)传感器(例如,参见专利文献1)。
TOF传感器发出照射到目标对象的照射光,并且接收由照射光在目标对象上的反射而产生的反射光,从而获得从照射光的发出到反射光的接收的时间,即,直到照射光被目标对象反射并返回的时间Δt。然后,使用时间Δt和光速c[m/s],根据式L=c×Δt/2获得距目标对象的距离L。
引用文献列表
专利文献
专利文献1:日本特开2016-090268号公报
专利文献2:日本特开2017-191042号公报
专利文献3:日本特开2013-076645号公报
发明内容
发明要解决的问题
近年来,自动驾驶的实用化被要求,并且在自动驾驶中,用于测量距车辆周围存在的物体的距离的距离测量是必不可少的。在将TOF传感器用于这种距离测量的情况下,推测将多个TOF传感器安装在车辆上,以测量距在车辆的各方向上存在的物体的距离。
在这种情况下,推测会发生以下的干扰,其中由安装在车辆上的多个TOF传感器中的一个发出的照射光(照射光本身或照射光的反射光)会被其他TOF传感器接收。
此外,如果执行自动驾驶的车辆的数量增加,则推测会发生以下的干扰,其中由安装在一个车辆上的TOF传感器发出的照射光被安装在其他车辆上的TOF传感器接收。
如果在TOF传感器之间发生干扰,则距离测量的精度将降低。
为了抑制干扰,专利文献2提出将发出照射光的脉冲模式的时间延迟由针对每个模型的伪随机数算出的时间,使得发出时机在各模型之间不会重叠。此外,专利文献3提出一种将照射光的脉冲宽度延长到由伪随机数算出的时间的方法。
然而,根据专利文献2或专利文献3,着眼于各模型的距离测量操作,但是非发光时间增长,使得所接收的光的总量减少,因此距离测量灵敏度可能会劣化。
鉴于以上情况而提出了本技术,并且本技术旨在抑制干扰并保持距离测量的精度。
问题的解决方案
根据本技术的一个方面的测距装置包括:发光部,其发出照射光;受光部,其接收由所述照射光在目标对象上的反射而产生的反射光;计算部,其基于从所述照射光的发出到所述反射光的接收的时间来计算距所述目标对象的距离;和发光控制部,其控制所述发光部,其中所述发光控制部通过在预定的帧内切换第一发光模式和不同于第一发光模式的第二发光模式来控制所述发光部的发光。
根据本技术的一个方面的测距方法包括由执行距离测量处理的测距装置实施的以下步骤:发出照射光;接收由所述照射光在目标对象上的反射而产生的反射光;基于从所述照射光的发出到所述反射光的接收的时间来计算距所述目标对象的距离;和控制所述照射光的发出,其中在所述的发出控制中,在预定的帧内切换第一发光模式和不同于第一发光模式的第二发光模式以控制发光。
根据本技术的一个方面的程序使执行距离测量处理的测距装置的计算机实施处理,包括:发出照射光;接收由所述照射光在目标对象上的反射而产生的反射光;基于从所述照射光的发出到所述反射光的接收的时间来计算距所述目标对象的距离;和控制所述照射光的发出,所述处理包括在所述的发出控制期间,在预定的帧内切换第一发光模式和不同于第一发光模式的第二发光模式以控制发光。
在根据本技术的一个方面的测距装置、测距方法和程序中,发出照射光;接收由所述照射光在目标对象上的反射而产生的反射光;和基于从所述照射光的发出到所述反射光的接收的时间来计算距所述目标对象的距离。通过在预定的帧内切换第一发光模式和不同于第一发光模式的第二发光模式来控制所述照射光的发出。
注意,测距装置可以是独立的装置或者是构成一个装置的内部块。
另外,程序可以通过经由传输介质被传输或者通过被记录在记录介质上来提供。
附图说明
图1是示出本技术适用的测距装置的实施方案的构成的图。
图2是示出受光部的构成例的图。
图3是示出像素的构成例的图。
图4是用于说明像素中的电荷分配的图。
图5是用于说明常规光照射的图。
图6是用于说明干涉光的图。
图7是用于说明发光模式的图。
图8是用于说明发光模式的图。
图9是用于说明干涉光的影响的图。
图10是用于说明其他发光模式的图。
图11是用于说明其他读出方法的图。
图12是用于说明记录介质的图。
图13是示出车辆控制系统的示意性构成的示例的框图。
图14是示出车外信息检测部和成像部的安装位置的示例的说明图。
具体实施方式
将说明用于实施本技术的形态(在下文中,称为实施方案)。
例如,本技术可以适用于构成通过间接TOF方式测量距离的测距系统的受光元件、具有这种受光元件的成像装置等。
例如,测距系统可以适用于安装在车辆上并测量距车辆外部的目标对象的距离的车载系统、测量距诸如使用者的手等目标对象的距离并基于测量结果等识别使用者的手势的用于手势识别的系统。在这种情况下,例如,手势识别的结果可以用于操作车载导航系统等。
<测距装置的构成例>
图1示出了本技术适用的测距装置的实施方案的构成例。
测距装置10包括透镜11、受光部12、信号处理部13、发光部14和发光控制部15。信号处理部13包括模式切换部21和距离图像生成部22。图1中的测距装置10通过向物体照射光并接收由光(照射光)在物体上的反射而产生的光(反射光)来测量距物体的距离。
测距装置10的发光系统包括发光部14和发光控制部15。在发光系统中,发光控制部15根据来自信号处理部13的控制使发光部14发出红外光(IR)。IR带滤波器可以设置在透镜11和受光部12之间,并且发光部14可以发出与IR带通滤波器的透射波长带相对应的红外光。
发光部14可以设置在测距装置10的壳体内部,或者可以设置在测距装置10的壳体外部。如稍后说明的,发光控制部15使发光部14以预定模式发光。该模式由模式切换部21设定,并且可以在预定的时机切换。
例如,信号处理部13用作基于从受光部12供给的图像信号来计算从测距装置10到物体的距离的计算部。在计算出的距离作为图像输出的情况下,信号处理部13的距离图像生成部22生成并输出针对各像素表示距物体的距离的距离图像。
<成像元件的构成>
图2是示出受光部12的构成例的框图。受光部12可以是互补金属氧化物半导体(CMOS)图像传感器。
受光部12包括像素阵列部41、垂直驱动部42、列处理部43、水平驱动部44和系统控制部45。像素阵列部41、垂直驱动部42、列处理部43、水平驱动部44和系统控制部45形成在未示出的半导体基板(芯片)上。
在像素阵列部41中,单位像素(例如,图3中的像素50)以矩阵状二维地排列,各单位像素具有产生与入射光量相对应量的光电荷并且在其内部存储产生的光电荷的光电转换元件。注意,在下文中,与入射光量相对应量的光电荷可以简称为“电荷”,并且单位像素可以简称为“像素”。
相对于以矩阵状排列的像素,像素阵列部41还设置有像素驱动线46和垂直信号线47。像素驱动线46沿着图中的水平方向(各像素行中的像素的排列方向)针对各行形成,并且垂直信号线47沿着图中的垂直方向(各列中的像素的排列方向)针对各列形成。像素驱动线46的一端连接到垂直驱动部42的与各行相对应的输出端。
垂直驱动部42是包括移位寄存器、地址解码器等的像素驱动部,其同时驱动像素阵列部41中的所有像素或者例如逐行驱动像素阵列部41中的各像素。由垂直驱动部42选择性地扫描的像素行中的各单位像素输出的像素信号通过相应的垂直信号线47供给到列处理部43。列处理部43针对像素阵列部41的各像素列对通过垂直信号线47从所选行中的单位像素输出的像素信号执行预定的信号处理,并且临时存储已经进行了预定的信号处理的像素信号。
具体地,列处理部43至少执行作为信号处理的噪声去除处理,例如,相关双采样(CDS)处理。由于列处理部43进行的相关双采样,因此去除了诸如复位噪声和放大晶体管的阈值变化等像素固有的固定模式噪声。注意,例如,除了噪声去除功能以外,列处理部43还可以具有模数(AD)转换功能,并且以数字形式输出信号电平。
水平驱动部44包括移位寄存器、地址解码器等,并且顺次地选择与列处理部43中的各像素列相对应的单位电路。由于水平驱动部44的选择性扫描,因此由列处理部43进行了信号处理的像素信号顺次输出到信号处理部48。
系统控制部45包括产生各种类型的时序信号等的时序发生器,并且基于由时序发生器生成的各种类型的时序信号来控制垂直驱动部42、列处理部43、水平驱动部44等的驱动。
在像素阵列部41中,相对于像素阵列矩阵,像素驱动线46针对各像素行沿着行方向延伸,并且两条垂直信号线47针对各像素列沿着列方向延伸。例如,像素驱动线46传输用于执行驱动以从像素读出信号的驱动信号。注意,尽管图1示出了像素驱动线46的一条配线,但是像素驱动线46的配线数量不限于一条。像素驱动线46的一端连接到垂直驱动部42的与各行相对应的输出端。
<单位像素的结构>
接下来,将说明在像素阵列部41中以矩阵状排列的每个单位像素50的具体结构。
像素50被构造为使得由一个光电二极管61产生的电荷分配给抽头(tap)51-1和51-2。然后,在由光电二极管61产生的电荷之中,从垂直信号线47-1读出分配给抽头51-1的电荷,并且作为检测信号SIG1输出。此外,从垂直信号线47-2读出分配给抽头51-2的电荷,并且作为检测信号SIG2输出。
抽头51-1包括传输晶体管62-1、浮动扩散(FD)部63-1、选择晶体管64-1和复位晶体管65-1。类似地,抽头51-2包括传输晶体管62-2、FD部63-2、选择晶体管64-2和复位晶体管65-2。
将参照图4说明像素50中的电荷的分配。这里,分配是指在不同时机读出在像素50(光电二极管31)中累积的电荷,从而针对各抽头读出电荷。
如图4所示,在照射时间T内重复照射的打开/关闭而调制(1个周期=Tp)的照射光从发光部14输出,并且在延迟了根据距物体的距离的延迟时间Td的情况下,由光电二极管61接收反射光。此外,传输控制信号TRT1控制传输晶体管62-1的接通/截止,并且传输控制信号TRT2控制传输晶体管62-2的接通/截止。如图所示,传输控制信号TRT1具有与照射光相同的相位,而传输控制信号TRT2具有通过逆转传输控制信号TRT1的相位而获得的相位。
因此,在根据传输控制信号TRT1接通传输晶体管62-1的同时,当光电二极管61接收反射光时产生的电荷被传输到FD部63-1。此外,在根据传输控制信号TRT2接通传输晶体管62-2的同时,电荷被传输到FD部63-2。因此,在其中周期性地进行照射时间T的照射光的照射的预定期间,经由传输晶体管62-1传输的电荷被顺次累积在FD部63-1中,并且经由传输晶体管62-2传输的电荷被顺次累积在FD部63-2中。
然后,当在其中累积电荷的期间结束之后根据选择信号SELm1接通选择晶体管64-1时,经由垂直信号线47-1读出FD部63-1中累积的电荷,并且从受光部12输出与电荷量相对应的检测信号SIG1。类似地,当根据选择信号SELm2接通选择晶体管64-2时,经由垂直信号线47-2读出FD部63-2中累积的电荷,并且从受光部12输出与电荷量相对应的检测信号SIG2。
当根据复位信号RST_A接通复位晶体管65-1时,FD部63-1中累积的电荷被排出。当根据复位信号RST_B接通复位晶体管65-2时,FD部63-2中累积的电荷被排出。
以这种方式,像素50可以将由光电二极管61接收的反射光产生的电荷根据延迟时间Td分配到抽头51-1和51-2,并且输出检测信号SIG1和检测信号SIG2。然后,延迟时间Td对应于从发光部14发出的光飞行到物体并在被物体反射之后返回到受光部12所需的时间,即,对应于距物体的距离。因此,测距装置10可以基于检测信号SIG1和检测信号SIG2根据延迟时间Td获得距物体的距离(深度)。
<间接TOF测距方法>
如上所述,将参照图5说明在其中使用两个抽头51读出在一个光电二极管61中累积的电荷的双抽头结构中使用间接TOF方式的距离的计算。与稍后将参照图6及后续附图说明的本技术适用的测距方法相比,将参照图5说明常规的测距方法。在参照图5的说明中,将以作为使用两个抽头和四个相位(Phase)的检测方法的2抽头/4相位方式为例进行说明。
用于生成距离图像的一帧期间被分割为A帧和B帧的两个信号检测期间。例如,用于生成距离图像的一帧期间被设定为约1/30s(秒)。因此,A帧的期间和B帧的期间分别为约1/60s。
发光部14(图1)输出在照射时间Tp内重复照射的打开/关闭而调制(1个周期=Tp)的照射光。例如,照射时间Tp可以设定为约10ns。受光部12根据距物体的距离以延迟时间Td接收反射光。
在4相位方式中,受光部12在四个时机通过抽头51-1或抽头51-2接收光,这四个时机分别是相位与照射光相同(相位0)的时机、相位偏移90度(相位90)的时机、相位偏移180度(相位180)的时机以及相位偏移270度(相位270)的时机。注意,这里的受光包括通过接通传输晶体管62而将光电二极管61中产生的电荷传输到FD部63的处理。
在图5中,在A帧中,在相位与照射光相同(相位0)的时机接通传输控制信号TRT1,并且通过抽头51-1开始受光。此外,在A帧中,在相位从照射光的相位偏移180度(相位180)的时机接通传输控制信号TRT2,并且通过抽头51-2开始受光。
此外,在B帧中,在相位从照射光的相位偏移90度(相位90)的时机接通传输控制信号TRT1,并且通过抽头51-1开始受光。此外,在B帧中,在相位从照射光的相位偏移270度(相位270)的时机接通传输控制信号TRT2,并且通过抽头51-2开始受光。
在这种情况下,抽头51-1和51-2在相位逆转180度的时机受光。假定在A帧期间的照射时间Tp内在相位0的时机在抽头51-1的FD 63-1中累积的电荷被定义为电荷Q1,则根据A帧期间内的照射时间Tp的累积时间的电荷Q1’在A帧期间累积在FD 63-1中。然后,在读出期间,从FD 63-1读出在FD 63-1中累积的电荷Q1’,作为与检测信号SIG1相对应的信号。与电荷Q1’相对应的检测信号SIG1的信号值被定义为信号值I1。
假定在A帧期间的照射时间Tp内在相位180的时机在抽头51-2的FD 63-2中累积的电荷被定义为电荷Q2,则根据A帧期间内的照射时间Tp的累积时间的电荷Q2’在A帧期间累积在FD 63-2中。然后,在读出期间,从FD 63-2读出在FD 63-2中累积的电荷Q2’,作为与检测信号SIG2相对应的信号。与电荷Q2’相对应的检测信号SIG2的信号值被定义为信号值I2。
假定在B帧期间的照射时间Tp内在相位90的时机在抽头51-1的FD 63-1中累积的电荷被定义为电荷Q3,则根据B帧期间内的照射时间Tp的累积时间的电荷Q3’在B帧期间累积在FD 63-1中。然后,在读出期间,从FD 63-1读出在FD 63-1中累积的电荷Q3’,作为与检测信号SIG1相对应的信号。与电荷Q3’相对应的检测信号SIG1的信号值被定义为信号值I3。
假定在B帧期间的照射时间Tp内在相位270的时机在抽头51-2的FD 63-1中累积的电荷被定义为电荷Q4,则根据B帧期间内的照射时间Tp的累积时间的电荷Q4’在B帧期间累积在FD 63-2中。然后,在读出期间,从FD 63-2中读出在FD 63-2中累积的电荷Q4’,作为与检测信号SIG2相对应的信号。与电荷Q4’相对应的检测信号SIG2的信号值被定义为信号值I4。
可以基于信号值I1、信号值I2、信号值I3和信号值I4的分配比来检测与延迟时间Td相对应的偏移量θ。即,由于基于相位偏移量θ来获得延迟时间Td,因此从延迟时间Td获得距目标对象的距离。
通过下式(1)获得相位偏移量θ,并且通过下式(2)计算出距目标对象的距离D。在式(2)中,C是光速,并且Tp是脉冲宽度。
[式1]
[式2]
以这种方式,可以计算出距预定的目标对象的距离。根据这种测距方法,可以执行受环境光影响较小的距离测量。在以上和以下的说明中,假定仅接收发出的脉冲光的反射光,但是实际上,还同时接收发出的脉冲光以外的各种环境光。因此,在光电二极管61中累积的电荷是由于发出的脉冲光和环境光引起的。
然而,相对于脉冲期间,环境光可以被认为是固定的,并且在环境光是固定的情况下,可以认为环境光同等地作为抵消重叠在信号值I1、信号值I2、信号值I3和信号值I4上。因此,在式(1)的计算中,抵消掉由于环境光引起的成分(抵消成分),并且不会影响测距结果。
另一方面,当存在由参照图5所述的测距方法执行距离测量的多个测距装置10的情况下,存在受到从其他测距装置发出的光的影响的可能性。例如,如图6所示,考虑测距装置10A和测距装置10B在同一时机测量距物体81的距离的情况。
测距装置10A用照射光La照射物体81,并接收反射光Ra。测距装置10B用照射光Lb照射物体81,并接收反射光Rb。由测距装置10A接收的反射光Ra包括由测距装置10A发出的照射光La的反射光和由测距装置10B发出的照射光Lb的反射光。
再次参照图5,例如,电荷Q1是作为用来自测距装置10A的照射光La和来自测距装置10B的照射光Lb照射物体81的结果而累积的电荷。照射光La和照射光Lb均为脉冲光。因此,与上述环境光不同,其不会作为抵消成分被抵消掉。因此,测距装置10A受到测距装置10B的照射光Lb的影响,使得可能无法进行正确的距离测量。这也可能在测距装置10B中发生。
如上所述,在发出高速闪烁脉冲光并且通过与该脉冲光同步的受光操作来执行距离测量的多个测距装置同时操作的情况下,发出的脉冲光的模式彼此干涉,这可能会增加由于干涉光的影响而无法执行正确的距离测量的可能性。
有鉴于此,将说明能够进行正确的距离测量的本技术适用的测距方法,使得即使多个测距装置同时操作,各个测距装置也不会受到干涉光的影响。
<本技术适用的测距方法>
图1~3示出了通过本技术适用的测距方法测量距离的测距装置的构成。将参照图7和图8说明具有图1~3所示的构成的测距装置10中的本技术适用的测距方法。
与参照图5所述的情况相似,下面将以作为使用四个相位(Phase)的检测方法的2抽头/4相位方式为例来说明测距方法,其中使用两个抽头51读出在一个光电二极管61中累积的电荷。
用于生成距离图像的一帧期间包括两帧,即,A帧和B帧。图7是用于说明A帧时的测距方法的图,并且图8是用于说明B帧时的测距方法的图。
A帧和B帧分别进一步被分割成子帧。一个子帧表示当将A帧(B帧)的曝光期间分割为多个部分时的一个期间。
在A帧被分割成n个子帧的情况下,B帧也被分割成n个子帧。即,A帧内的子帧数量与B帧内的子帧数量相同。A帧(B帧)内的子帧的数量n为2以上。
子帧的数量可以是固定的或可变的。在数量是可变的情况下,该数量可以针对每个生成距离图像的单位而改变,或者可以每经过预定的时间而改变。
一个子帧的期间被定义为期间Tm。期间Tm是照射光的照射时间Tp的整数倍。期间Tm的最小值可以是照射时间Tp。此外,期间Tm的最大值可以是A帧的曝光期间的一半。即,期间Tm可以最小设定为Tm=期间Tp,并且可以最大设定为期间Tm=(A帧的曝光期间)/2。在子帧的数量是可变的情况下,数量设定在其中满足关于期间Tm的这些条件的范围内。
在一个子帧期间内,从发光部14(图1)输出在照射时间Tp内重复照射的打开/关闭而调制的照射光。两个相位被设定为打开照射的时间。在子帧期间内,光被多次发出,并且基于设定的相位来控制子帧期间内的最初照射打开的时机。
作为相位,设定相位0和相位1。相位0是其中在没有相位偏移的时机打开照射的相位(在下文中,适当地称为相位0发光模式或简称为相位0),并且相位1是其中在具有180度偏移的时机打开照射的相位(在下文中,适当地称为相位1发光模式或简称为相位1)。这里,将以两种发光模式设定为相位发光模式的情况为例继续进行说明。
在设定相位0发光模式的情况下,发光部14从子帧的开始时发光。换句话说,在其中设定相位0发光模式的子帧中,由发光部14以相位为0度的发光模式发出照射光。传输控制信号TRT1根据该发光接通。传输控制信号TRT2在相位相对于传输控制信号TRT1偏移180度的时机接通。在相位0的情况下,执行与参照图5说明的操作相同的操作。
在设定相位1发光模式的情况下,发光部14在相位从子帧的开始时前进180度的时刻发光。换句话说,在其中设定相位1发光模式的子帧中,由发光部14以相位为180度的发光模式发出照射光。在相位1中,发光的脉冲的相位相对于相位0的相位逆转,即,延迟180度。与相位0发光模式的情况相同,传输控制信号TRT1在开始发光的时刻接通,并且传输控制信号TRT2在相位偏移180度的时机接通。
参照图7,在A帧中,子帧期间Tm1被设定为相位0发光模式,子帧期间Tm2被设定为相位1发光模式,子帧期间Tm3被设定为相位1发光模式,并且子帧期间Tm4被设定为相位0发光模式。
由于子帧期间Tm1被设定为相位0发光模式,因此在开始子帧期间Tm1的时刻在没有任何相位偏移的情况下,打开照射光的照射。此外,在子帧期间Tm1中,在相位与照射光的相位相同(相位0)的时机,接通传输控制信号TRT1,并且通过抽头51-1开始受光。此外,在相位从照射光的相位偏移180度(相位180)的时机接通传输控制信号TRT2,并且通过抽头51-2开始受光。
由于子帧期间Tm2被设定为相位1发光模式,因此在相位从子帧期间Tm2的开始时刻偏移180度的时刻,打开照射光的照射。此外,在子帧期间Tm2中,在相位与照射光的相位相同(相位0)的时机,接通传输控制信号TRT1,使得其在相位从子帧期间Tm2的开始时刻偏移180度的时机接通,并且通过抽头51-1开始受光。另外,由于在相位从照射光的相位偏移180度(相位180)的时机接通传输控制信号TRT2,因此其相位从子帧期间Tm2的开始时刻偏移360度的时机接通,并且通过抽头51-2开始受光。
由于子帧期间Tm3被设定为相位1发光模式,因此实施与子帧期间Tm2相似的操作。由于子帧期间Tm4被设定为相位0发光模式,因此实施与子帧期间Tm1相似的操作。
以这种方式,在A帧期间中,针对各子帧期间设定相位0发光模式或相位1发光模式,并且基于设定的相位来控制由发光部14开始发光的时机。
在A帧期间中的相同相位也被设定在B帧期间中。参照图8,与在A帧期间中相同,在B帧期间中,子帧期间Tm1’(以撇号给出B帧期间中的子帧期间,以与A帧期间中的子帧期间区分)被设定为相位0发光模式,子帧期间Tm2’被设定为相位1发光模式,子帧期间Tm3’被设定为相位1发光模式,并且子帧期间Tm4’被设定为相位0发光模式。
由于子帧期间Tm1’被设定为相位0发光模式,因此在开始子帧期间Tm1’的时刻在没有任何相位偏移的情况下,打开照射光的照射。此外,在子帧期间Tm1’中,在相位从照射光的相位偏移90度(相位90)的时机,接通传输控制信号TRT1,并且通过抽头51-1开始受光。此外,在相位从照射光的相位偏移270度(相位270)的时机,接通传输控制信号TRT2,并且通过抽头51-2开始受光。
由于子帧期间Tm2’被设定为相位1发光模式,因此在相位从子帧期间Tm2’的开始时刻偏移180度的时刻,打开照射光的照射。此外,在子帧期间Tm2’中,在相位从照射光的相位偏移90度(相位90)的时机,接通传输控制信号TRT1,使得其在相位从子帧期间Tm2’的开始时刻偏移270度的时机接通,并且通过抽头51-1开始受光。另外,由于在相位从照射光的相位偏移270度(相位270)的时机接通传输控制信号TRT2,因此在其相位从子帧期间Tm2’的开始时刻偏移450度的时机接通,并且通过抽头51-2开始受光。
由于子帧期间Tm3’被设定为相位1发光模式,因此实施与子帧期间Tm2’相似的操作。由于子帧期间Tm4’被设定为相位0发光模式,因此实施与子帧期间Tm1’相似的操作。
以这种方式,执行控制,使得针对各子帧,由发光部14开始发光的时机(换句话说,相位)是不同的。再次参照图5,常规地,由发光部14开始发光的时机是相同的。例如,在A帧期间中,输出在相位为0度的照射时间Tp内重复照射的打开/关闭而调制的照射光。
另一方面,再次参照图7,例如,在A帧期间中,A帧期间的曝光期间被分割为多个子帧,和针对各子帧设定在照射时间Tp内重复照射的打开/关闭的开始的相位。相位设定在A帧期间和B帧期间之间是相同的。
由模式切换部21(图1)设定相位0和相位1中的哪一个用于开始发光,并且发光控制部15基于设定的模式来控制发光部14,从而控制相位0下的发光模式中的发光或相位1下的发光模式中的发光。
模式切换部21设定相位0发光模式或相位1发光模式的顺序。例如,如上所述,设定相位的顺序,如相位0、相位1、相位1和相位0的顺序。在用数字串表示的情况下,其为0110。在这种数字序列被表示为模式的情况下,模式切换部21执行用于在预定的时机来切换模式的处理。
模式切换部21在相位0发光模式下的发光模式和相位1发光模式下的发光模式之间随机切换。
针对每个生成距离图像的单位来设定模式切换部21切换模式的预定时机,并且每当获取用于生成一个距离图像的A帧和B帧时,就可以切换模式。
可选择地,可以在经过预定时间之后切换模式。例如,每当生成预定数量的距离图像时,就可以切换模式。
可选择地,当测距装置10开始距离测量时,例如,当测距装置10的电源打开时,可以设定模式。
可选择地,模式切换部21可以存储关于在制造期间等生成的发光模式的顺序的信息(模式),并且在切换模式的时机读出所存储的模式。在模式切换部21被构造为存储模式的情况下,针对各测距装置10存储不同的模式。
所存储的模式可以是表示相位0发光模式或相位1发光模式的数字串,并且该数字串中的数字的数量可以等于或大于A帧(B帧)的分割数量(一帧中包括的子帧的数量)。例如,在一帧包括10个子帧的情况下,数字串可以是10个数字的串或10个以上数字的串。
另外,在存储等于或大于一帧中包括的子帧数量的数字的串的情况下,从所存储的数字串读出包括与子帧数量相同的数字数量的串,并且可以随机选择读出串的位置。
例如,在一帧包括10个子帧并且将包括100个数字的数字串存储为数字串的情况下,读出100个数字中的包括10个数字的串。将要读出的串的开始位置是随机设定的。例如,可以读出从头部的第10个数字起包括10个数字的串,或者可以读出从头部的第30个数字起包括10个数字的串。
在模式切换部21生成模式的情况下,其包括生成随机数的随机数生成部(未示出),并且通过由随机数生成部生成的伪随机数来随机地设定模式。
以这种方式,根据模式切换部21的指示来设定发出脉冲的相位。
所设定的模式对A帧和B帧是共通的。因此,如图7所示,在A帧中设定相位0、相位1、相位1、相位0的模式(由数字串表示的0110的模式)的情况下,如图8所示,在B帧中还设定相位0、相位1、相位1和相位0的模式(由数字串表示的0110的模式)。
如上所述,发光部14开始发光的时机在一帧内变化。此外,根据开始发光的时机来设定读出时机。
在执行控制以使发出照射光的时机变化的情况下,与参照图5说明的情况相同,还通过利用信号值I1、信号值I2、信号值I3和信号值I4的分配比检测与延迟时间Td相对应的偏移量θ来计算距目标对象的距离。
在A帧期间(图7),电荷Q1在照射时间Tp中在相位0的时机累积在抽头51-1的FD63-1中。在A帧期间中,与A帧期间内的照射时间Tp的累积时间相对应的电荷Q1’累积在FD63-1中。然后,在读出期间,从FD 63-1读出与FD 63-1中累积的电荷Q1’相对应的检测信号SIG1的信号值I1。
在A帧期间,电荷Q2在照射时间Tp中在相位180的时机累积在抽头51-2的FD 63-2中。在A帧期间中,与A帧期间内的照射时间Tp的累积时间相对应的电荷Q2’累积在FD 63-2中。然后,在读出期间,从FD 63-2读出与FD 63-2中累积的电荷Q2’相对应的检测信号SIG2的信号值I2。
在B帧期间,电荷Q3在照射时间Tp中在相位90的时机累积在抽头51-1的FD 63-1中。在B帧期间中,与B帧期间内的照射时间Tp的累积时间相对应的电荷Q3’累积在FD 63-1中。然后,在读出期间,从FD 63-1读出与FD 63-1中累积的电荷Q3’相对应的检测信号SIG1的信号值I3。
在B帧期间,电荷Q4在照射时间Tp中在相位270的时机累积在抽头51-2的FD 63-2中。在B帧期间中,与B帧期间内的照射时间Tp的累积时间相对应的电荷Q4’累积在FD 63-2中。然后,在读出期间,从FD 63-2读出与FD 63-2中累积的电荷Q4’相对应的检测信号SIG2的信号值I4。
可以基于信号值I1、信号值I2、信号值I3和信号值I4的分配比来检测与延迟时间Td相对应的偏移量θ。即,由于基于相位偏移量θ来获得延迟时间Td,因此从延迟时间Td获得距目标对象的距离。
通过上式(1)获得相位偏移量θ,并且通过上式(2)计算出距目标对象的距离D。
以这种方式,可以计算出距预定的目标对象的距离。根据这种测距方法,可以执行受环境光影响较小的距离测量。此外,如参照图7和图8说明的,即使多个测距装置同时操作,也可以通过针对各个子帧设定照射光的开始发出的时机(相位)来防止其中发出的脉冲光的模式彼此干扰的情况的发生,从而能够执行正确的距离测量。
换句话说,即使在发出高速闪烁脉冲光并且通过与该脉冲光同步的受光操作来执行距离测量的多个测距装置同时操作的情况下,各个测距装置也可以在不受干涉光的影响的情况下执行正确的距离测量。这将进一步进行说明。
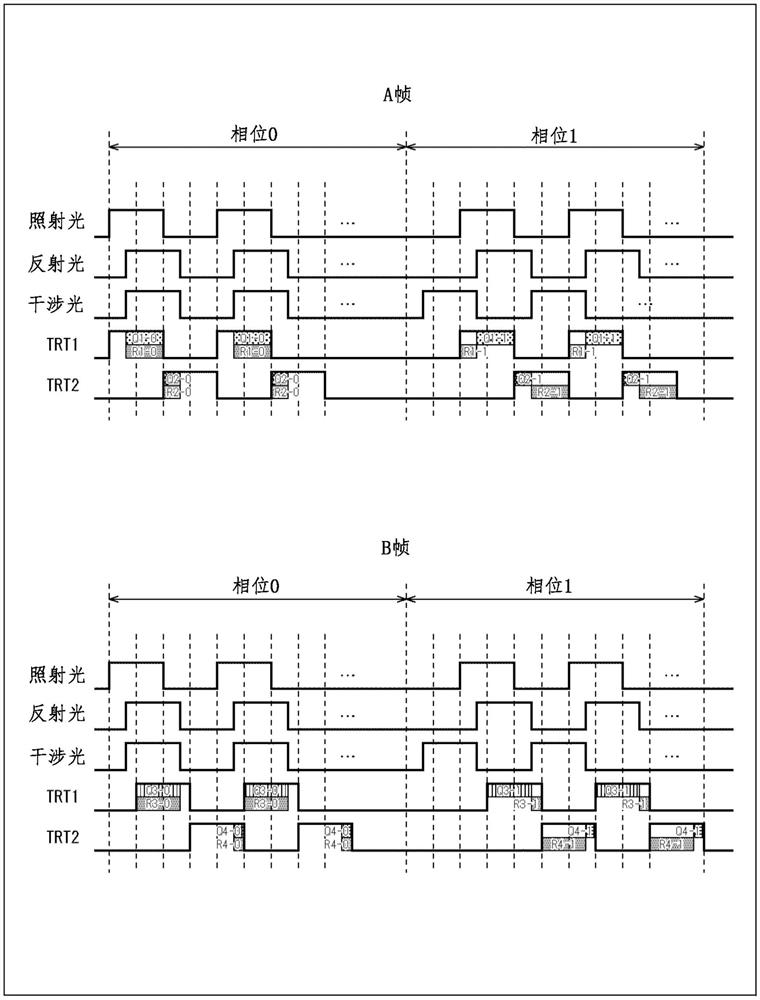
图9是用于说明可以消除其他设备对本设备的影响,换句话说,可以去除干涉光的影响的图。与图7所示的情况相同,图9中的上图用于说明在A帧中的测距操作,并且图9中的下图用于说明在B帧中的测距操作。图9不仅示出了由本设备发出的照射光产生的反射光,并且还示出了作为干涉光的由其他设备发出的照射光产生的反射光。
假设本设备是测距装置10A,其他设备是测距装置10B,并且与图6所示的情况相同,情况是测距装置10A和测距装置10B彼此靠近放置以测量距物体81的距离。
在如参照图7和图8所说明的改变相位的同时,测距装置10A发出照射光,而测距装置10B在未改变相位的情况下发出照射光。在图9所示的示例中,测距装置10A通过交替地改变相位0发光模式和相位1发光模式来发光。测距装置10B以相位0发光模式连续发光。换句话说,与常规的测距装置相同,测距装置10B如参照图5所说明的发光,或者当其中相位0为连续的模式被设定为相位模式时发光。
当在A帧的相位0中进行发光时,通过接收由于测距装置10A发出的光而产生的反射光,电荷Q1-0累积在测距装置10A的抽头51-1的FD63-1中。此外,通过接收由于测距装置10B发出的光而产生的干涉光,电荷R1-0累积在测距装置10A的抽头51-1的FD 63-1中。
当在A帧的相位0中进行发光时,通过接收由于测距装置10A发出的光而产生的反射光,电荷Q2-0累积在测距装置10A的抽头51-2的FD63-2中。此外,通过接收由于测距装置10B发出的光而产生的干涉光,电荷R2-0累积在测距装置10A的抽头51-2的FD 63-2中。
当在A帧的相位1中进行发光时,通过接收由于测距装置10A发出的光而产生的反射光,电荷Q1-1累积在测距装置10A的抽头51-1的FD63-1中。此外,通过接收由于测距装置10B发出的光而产生的干涉光,电荷R1-1累积在测距装置10A的抽头51-1的FD 63-1中。
当在A帧的相位1中进行发光时,通过接收由于测距装置10A发出的光而产生的反射光,电荷Q2-1累积在测距装置10A的抽头51-2的FD63-2中。此外,通过接收由于测距装置10B发出的光而产生的干涉光,电荷R2-1累积在测距装置10A的抽头51-2的FD 63-2中。
当在B帧的相位0中进行发光时,通过接收由于测距装置10A发出的光而产生的反射光,电荷Q3-0累积在测距装置10A的抽头51-1的FD63-1中。此外,通过接收由于测距装置10B发出的光而产生的干涉光,电荷R3-0累积在测距装置10A的抽头51-1的FD 63-1中。
当在B帧的相位0中进行发光时,通过接收由于测距装置10A发出的光而产生的反射光,电荷Q4-0累积在测距装置10A的抽头51-2的FD63-2中。此外,通过接收由于测距装置10B发出的光而产生的干涉光,电荷R4-0累积在测距装置10A的抽头51-2的FD 63-2中。
当在B帧的相位1中进行发光时,通过接收由于测距装置10A发出的光而产生的反射光,电荷Q3-1累积在测距装置10A的抽头51-1的FD63-1中。此外,通过接收由于测距装置10B发出的光而产生的干涉光,电荷R3-1累积在测距装置10A的抽头51-1的FD 63-1中。
当在B帧的相位1中进行发光时,通过接收由于测距装置10A发出的光而产生的反射光,电荷Q4-1累积在测距装置10A的抽头51-2的FD63-2中。此外,通过接收由于测距装置10B发出的光而产生的干涉光,电荷R4-1累积在测距装置10A的抽头51-2的FD 63-2中。
如上所述,测距装置10A受到测距装置10B的干涉光的影响。例如,当在A帧的相位0中进行发光时,电荷Q1-0和电荷R1-0累积在测距装置10A的FD 63-1中,并且电荷Q2-0和电荷R2-0累积在FD 63-2中。此外,当在A帧的相位1中进行发光时,电荷Q1-1和电荷R1-1累积在测距装置10A的FD 63-1中,并且电荷Q2-1和电荷R2-1累积在FD 63-2中。
通过将在相位0的照射期间由于干涉光的影响而累积的电荷R1-0与在相位1的照射期间由于干涉光的影响而累积的电荷R1-1相加获得的值被定义为值R1。通过将在相位0的照射期间由于干涉光的影响而累积的电荷R2-0与在相位1的照射期间由于干涉光的影响而累积的电荷R2-1相加获得的值被定义为值R2。
值R1和值R2是相同的(基本相同)。因此,在上述用于获得相位的式(1)中,减去与值I1相对应的值R1和与值I2相对应的值R2,从而抵消干涉光的受光成分,因此可以消除位置检测期间的干涉光的影响。
以这种方式,在A帧中,可以去除干涉光的受光成分的影响,从而可以防止位置检测的精度的降低。此外,同样在B帧中,与在A帧中相同,可以抵消干涉光的受光成分,从而可以减小位置检测期间的干涉光的影响。
即,在B帧中,如图9的下图所示,通过将在相位0的照射期间由于干涉光的影响而累积的电荷R3-0与相位1的照射期间由于干涉光的影响而累积的电荷R3-1相加获得的值同样被定义为值R3。通过将相位0的照射期间由于干涉光的影响而累积的电荷R4-0与相位1的照射期间由于干涉光的影响而累积的电荷R4-2相加获得的值被定义为值R4。
值R3和值R4是相同的(基本相同)。因此,在上述用于获得相位的式(1)中,减去与值I3相对应的值R3和与值I4相对应的值R4,从而抵消干涉光的受光成分,因此可以消除位置检测期间的干涉光的影响。
这可以由下面通过将数值代入式(1)获得的式(3)表示。
[式3]
在式(3)中,R1=R2且R3=R4,因此,式(3)最终与式(1)相同。如上所述,从式子可以确认,通过适用本技术可以消除干涉光的影响。
由于如上所述的构成(其中在各测距装置10中,通过独有的随机数模式确定相位发光模式的顺序),因此即使多个测距装置10彼此靠近放置并受到其他测距装置10A的影响,其他测距装置10的发光模式也可以设定为与本测距装置10的读出时机不具有相关性。因此,其他测距装置10的受光成分可以均等地分配给抽头51-1和抽头51-2。
因此,在作为相位检测式的上式(1)中,抵消了其他测距装置10的受光成分,从而能够在不会被其他测距装置10的发光模式干涉的情况下执行距离检测。
注意,在参照图9说明的示例中,两个测距装置,即,测距装置10A和测距装置10B彼此靠近,并且测距装置10B在相位0连续地发光。然而,即使在本技术适用的多个测距装置10彼此靠近放置的情况下,也能够在不会被从其他测距装置10发出的光的发光模式干涉的情况下执行距离检测。
多个测距装置10中的每个被设定为具有相位0发光模式和相位1发光模式的模式,并且基于所设定的模式执行照射控制。着眼于多个测距装置10中的一个,其他测距装置10的发光模式和本测距装置10的读出相位(在上述示例中,读出Q1~Q4的四个相位)之间的相关性较低。当相关性减小时,来自其他测距装置10的光接收信号被大致均等地分配到各相位。因此,在作为相位检测式的上式(1)中,抵消了由于来自其他测距装置10的光接收信号而产生的成分。
因此,当针对多个测距装置10中的每个设定发光的模式时,各测距装置10可以在不受其他测距装置10影响的情况下检测距离。
此外,即使多个测距装置10包括本技术不适用的测距装置10,也可以在不受从该测距装置10发出的光影响的情况下检测距离。例如,即使在诸如图9所示的测距装置10B等在不改变发光模式的情况下在相位0连续发光的装置靠近测距装置10A放置,测距装置10A也能够如参照图9说明的在不受测距装置10B影响的情况下执行距离检测。
通过适用本技术,可以将由于由其他测距装置10发出的光而引起的反射光与固定的环境光同等地对待,因此可以更精确地执行距离测量。
即使在存在使光闪烁但不执行距离测量的装置并且本技术适用的测距装置被该装置的闪烁光干涉和影响的情况下,测距装置10也可以以如上所述相同的方式来抵消由于闪烁光而引起的干涉,从而能够高精度地检测距离。即,根据本技术,可以减小各种类型的光闪烁噪声的影响(干涉),并且可以更精确地检测距离。
此外,由于在根据本技术的发光中,在脉冲期间Tp内执行相位调制,因此可以在不改变发光的总时间的情况下进行发光。例如,专利文献2和3提出了设置其中不发光的期间以防止干涉。然而,通过设置其中不发光的期间,例如,用于生成一幅距离图像的期间(一帧)内的总发光时间减小,因此检测灵敏度可能会降低。可选择地,为了使总发光时间等于本技术适用的情况下的总发光时间,因为存在其中不发光的期间,所以脉冲期间Tp增加。因此,曝光灵敏度可能会降低。
然而,由于在如上所述的根据本技术的发光中,在脉冲期间Tp内执行相位调制,因此可以在不改变光照射总时间的情况下进行发光。因此,可以在不降低曝光灵敏度的情况下避免其他装置的干涉。
上述实施方案说明了其中相位发光模式包括相位0(=0度)发光模式和相位1(=180度)发光模式的示例。然而,可以设定任何其他发光模式。例如,如图10所示,可以设定四个相位发光模式,并且可以通过生成伪随机数来改变这些相位发光模式。
参照图10,相位0发光模式、相位1发光模式、相位2发光模式和相位3发光模式被设定为相位发光模式。在相位0发光模式中,在没有相位偏移的时机打开照射。在相位1发光模式中,在存在90度偏移的时机打开照射。
在相位2发光模式中,在存在180度偏移的时机打开照射。在相位3发光模式中,在存在270度偏移的时机打开照射。
在设定相位0发光模式的情况下,发光部14在从子帧的开始时发光。在设定相位1发光模式的情况下,发光部14在相位从子帧的开始时前进90度的时刻发光。
在设定相位2发光模式的情况下,发光部14在相位从子帧的开始时前进180度的时刻发光。在设定相位3发光模式的情况下,发光部14在相位从子帧的开始时前进270度的时刻发光。
以这种方式,可以设定四种类型的相位发光模式,并且与上述实施方案相同,可以生成伪随机数,并且可以根据伪随机数来设定发光模式。本技术可以适用于设定有两种类型的相位发光模式、三种类型的相位发光模式或四种类型的相位发光模式的情况。此外,例如,在设定有两种类型的相位发光模式的情况下,在上述示例中,它们是相位0(=0度)发光模式和相位1(=180度)发光模式。然而,组合不限于此。例如,本技术可以适用于设定有0度和90度的相位发光模式的情况,或者设定有90度和270度的相位发光模式的情况。
此外,本技术还可以适用于设定有四种以上的相位发光模式的情况。相位可以设定为0~359度。如果以1度间隔来设定相位,则设定有与0~359度相对应的相位0至相位359的发光模式,并且设定有根据相位0至相位359的发光模式的组合的发光模式。
即使以10度间隔代替1度间隔来设定相位,则设定有与0~350度相对应的相位0至相位35的发光模式,并且设定有根据相位0至相位35的发光模式的组合的发光模式。因此,可以减小与其他装置的发光模式重叠的可能性。
如上所述,相位发光模式可以是诸如0度或90度等离散的相位调制,或者可以被精细地设定为被视为连续相位调制的调制。在相位发光模式被设定为其可以被视为连续相位调制的情况下,作为伪随机数生成的数值可以用作相位。例如,如果所生成的伪随机数是50,则可以将50度设定为相位。
本技术可以适用于上述间接TOF方式。本技术也可以适用于直接TOF方式。例如,本技术可以适用于使用直接TOF方式的LIDAR系统。即,本技术可以适用于在直接时域中执行测量的直接TOF方式,并且适用于使用取决于TOF的物理量的变化和用于将该变化转换为时间的变化的时间基准来执行测量的间接TOF方式。
此外,本技术不仅可以适用于与距离测量有关的装置,而且可以适用于由于照射的脉冲光而同步地接收反射光的装置。
此外,尽管上述实施方案说明了作为示例的2抽头/4相位的TOF传感器,但是本技术也可以适用于其他类型的TOF传感器。例如,本技术可以适用于如图11所示的4抽头/4相位的TOF传感器。
例如,类似于图7,图11是用于说明在测距装置10中本技术适用的测距方法以及用于说明使用4抽头/4相位方式的测距方法的图。
4抽头/4相位的TOF传感器是具有与上述抽头51相对应的四个读出部的传感器。在图11所示的示例中,由传输控制信号TRT1控制的抽头(称为抽头TRT1)、由传输控制信号TRT2控制的抽头(称为抽头TRT2)、由传输控制信号TRT3控制的抽头(称为抽头TRT3)和由传输控制信号TRT4控制的抽头(称为抽头TRT4)对应于四个抽头。
在作为生成距离图像的单位的一帧中,通过抽头TRT1执行相位与照射光的相位相同(相位0)的读出,并且通过抽头TRT2执行相位从照射光的相位偏移180度(相位180)的读出。
此外,通过抽头TRT3执行相位从照射光的相位偏移90度(相位90)的读出,并且通过抽头TRT4执行相位从照射光的相位偏移270度(相位270)的读出。
如上所述,根据4抽头/4相位的TOF传感器,可以在无需使用诸如A帧和B帧等两帧的情况下执行一帧中与2抽头/4相位方式等效的处理。即,本技术可以适用于将一帧分割为多个子帧并且针对各子帧改变照射光的相位的情况,并且本技术可以适用于2抽头/4相位的TOF传感器和4抽头/4相位的TOF传感器。
在上述实施方案中,子帧期间Tm的长度是固定的,但是可以进一步改变子帧期间Tm的长度以防止干扰。
再次参照图7。A帧被分割为n个子帧,和n个子帧的期间Tm1、Tm2~Tmn被设定为相同的长度。子帧的期间Tm的长度可以改变。在图7所示的示例中,期间Tm1、Tm2~Tmn的各个长度可以彼此不同。
在期间Tm的长度改变的情况下,与上述相位模式相同,可以通过生成伪随机数来设定相位模式,或者可以预先存储和根据需要读出相位模式。由于其中子帧期间Tm的模式和子帧中的发光模式两者均改变的构成,因此可以减小与来自其他设备的脉冲光的模式重叠的可能性,从而可以在受干涉光影响较小的情况下执行距离测量。
<记录介质>
可以通过硬件或软件来实施上述一系列处理。在通过软件实施一系列处理的情况下,构成该软件的程序被安装在计算机上。这里,计算机包括嵌入在专用硬件中的计算机,以及例如能够通过安装各种程序来实施各种功能的通用个人计算机。
图12是示出以编程方式实施上述一系列处理的计算机的硬件的构成例的框图。在计算机中,中央处理单元(CPU)201、只读存储器(ROM)202和随机存取存储器(RAM)203通过总线204彼此连接。输入/输出接口205进一步连接到总线204。输入部206、输出部207、存储部208、通信部209和驱动器210连接到输入/输出接口205。
输入部206包括键盘、鼠标、麦克风等。输出部207包括显示器、扬声器等。存储器208包括硬盘、非易失性存储器等。通信部209包括网络接口等。驱动器210驱动诸如磁盘、光盘、磁光盘或半导体存储器等可移除介质211。
在如上所述构造的计算机中,例如,CPU 201经由输入/输出接口205和总线204将存储在存储器208中的程序加载到RAM 203中,并且实施该程序,从而执行上述一系列处理。
例如,由计算机(CPU 201)实施的程序可以记录和提供在作为封装介质等的可移除介质211上。另外,还可以经由诸如局域网、互联网和数字卫星广播等有线或无线传输介质来提供程序。
在计算机中,通过将可移除介质211加载到驱动器210中,程序可以经由输入/输出接口205安装在存储器208中。此外,可以通过通信部209接收程序,并且经由有线或无线传输介质将程序安装在存储器208中。另外,程序可以预安装在ROM 202或存储器208中。
注意,由计算机实施的程序可以是其中以本说明书中说明的顺序按时间序列执行处理的程序,或者可以是其中并行地或在诸如调用处理时等必要的时机执行处理的程序。
<移动体的应用例>
根据本公开的技术(本技术)可以适用于各种产品。例如,根据本公开的技术可以被实现为安装在诸如汽车、电动汽车、混合电动汽车、摩托车、自行车、个人移动装置、飞机、无人飞行器、船舶和机器人等任何类型的移动体上的装置。
图13是作为根据本公开的技术可以适用的移动体控制系统的示例的车辆控制系统的示意性构成例的框图。
车辆控制系统12000包括经由通信网络12001彼此连接的多个电子控制单元。在图13所示的示例中,车辆控制系统12000包括驱动系统控制单元12010、主体系统控制单元12020、车外信息检测单元12030、车内信息检测单元12040和综合控制单元12050。此外,作为综合控制单元12050的功能构成,示出了微型计算机12051、声音/图像输出部12052和车载网络接口(I/F)12053。
驱动系统控制单元12010根据各种程序来控制与车辆的驱动系统有关的装置的操作。例如,驱动系统控制单元12010用作用于产生车辆的驱动力的诸如内燃机或驱动电机等驱动力产生装置、用于向车轮传递驱动力的驱动力传递机构、用于调整车辆的转向角的转向机构、用于产生车辆的制动力的制动装置上的控制装置。
主体系统控制单元12020根据各种程序来控制安装到车体的各种装置的操作。例如,主体系统控制单元12020用作无钥匙进入系统、智能钥匙系统、电动窗装置或诸如头灯、尾灯、刹车灯、转向信号灯或雾灯等各种灯的控制装置。在这种情况下,主体系统控制单元12020可以接收用于代替按键的从便携式装置传递的无线电波或来自各种开关的信号。主体系统控制单元12020接收这些无线电波或信号的输入,并且控制车辆的门锁装置、电动窗装置、灯等。
车外信息检测单元12030检测装备有车辆控制系统12000的车辆的外部有关的信息。例如,车外信息检测单元12030与成像部12031连接。车外信息检测单元12030使成像部12031拍摄车辆外部的图像,并且接收所拍摄的图像。车外信息检测单元12030可以基于接收到的图像进行检测诸如人、汽车、障碍物、道路标志、路面上的文字等物体的处理或检测距其距离的处理。
成像部12031是接收光并且输出对应于受光量的电气信号的光学传感器。成像部12031可以输出电气信号作为图像或作为距离测量用信息。此外,由成像部12031接收的光可以是可见光或诸如红外线等不可见光。
车内信息检测单元12040检测车辆内部有关的信息。例如,车内信息检测单元12040与用于检测驾驶员的状态的驾驶员状态检测部12041连接。例如,驾驶员状态检测部12041可以包括拍摄驾驶员的图像的相机。基于从驾驶员状态检测部12041输入的检测信息,车内信息检测单元12040可以计算驾驶员的疲劳度或驾驶员的集中度,或者可以判断驾驶员是否入睡。
例如,微型计算机12051可以基于由车外信息检测单元12030或车内信息检测单元12040获得的关于车辆内部和外部的信息来计算驱动力产生装置、转向机构或制动装置的控制目标值,并且可以向驱动系统控制单元12010输出控制指令。例如,微型计算机12051可以进行协调控制,旨在实现包括用于车辆的碰撞避免或碰撞缓和、基于车辆之间的距离的追踪行驶、车辆速度保持行驶、车辆的碰撞警告、车辆的车道偏离的警告等的高级驾驶员辅助系统(ADAS)的功能。
另外,微型计算机12051可以通过基于由车外信息检测单元12030或车内信息检测单元12040获得的关于车辆周围情况的信息来控制驱动力产生装置、转向机构、制动装置等来进行协调控制,使得车辆自主行驶而不依赖于驾驶员的操作的自动驾驶等。
此外,微型计算机12051可以基于由车外信息检测单元12030获得的关于车辆外部的信息将控制指令输出到主体系统控制单元12030。例如,微型计算机12051基于由车外信息检测单元12030检测到的前方车辆或对向车辆的位置来进行协调控制,例如,该协调控制包括控制头灯和诸如将远光灯改变为近光灯,以便防止眩光。
声音/图像输出部12052将声音或图像的至少一种的输出信号传递到能够在视觉上或听觉上通知车辆的乘员或车辆外部的信息的输出装置。在图13的示例中,作为输出装置,音频扬声器12061、显示部12062和仪表板12063被示出。例如,显示部12062可以包括车载显示器或平视显示器中的至少一种。
图14是示出成像部12031的安装位置的示例的图。
在图14中,车辆12100包括作为成像部12031的成像部12101、12102、12103、12104和12105。
例如,成像部12101、12102、12103、12104和12105中设置在诸如车辆12100的车头、侧视镜、后保险杠或后门,以及车辆12100的车厢中的挡风玻璃的上侧等位置。设置在车头中的成像部12101和设置在车辆的车厢中的挡风玻璃上侧的成像部12105主要获得车辆12100的前方环境的图像。设置在车辆12100的侧视镜上的成像部12102和12103主要获得车辆12100的侧方环境的图像。设置在车辆12100的后保险杠或后门中的成像部12104主要获得车辆12100的后方环境的图像。设置在车辆的车厢中的挡风玻璃上侧的成像部12105主要用于检测前方车辆、行人、障碍物、交通信号、交通标志、车道等。
注意,图14示出了成像部12101~12104的成像范围的示例。成像范围12111表示车头中的成像部12101的成像范围,成像范围12112和12113分别表示侧视镜中的成像部12102和12103的成像范围,并且成像范围12114表示后保险杠或后门中的成像部12104的成像范围。例如,通过叠加由成像部12101~12104拍摄的图像数据可以获得车辆12100的从上方看到的鸟瞰图像。
成像部12101~12104中的至少一个可以具有获取距离信息的功能。例如,成像部12101~12104中的至少一个可以是包括多个成像元件的立体相机,或者可以是包括相位差检测用像素的成像元件。
例如,基于从成像部12101~12104获得的距离信息,微型计算机12051获得车辆12100距成像范围12111~12114内的各立体物的距离以及距离的时间变化(相对于车辆12100的相对速度),并且可以提取位于车辆12100的行驶路线上的特别是最靠近车辆12100的立体物且在与车辆12100的行驶方向大致相同的方向上以预定速度(例如,0km/h以上)行驶的立体物作为前方车辆。此外,微型计算机12051可以通过预设定车辆12100和前方车辆之间将要保持的距离进行自动制动控制(包括追踪行驶停止控制)、自动加速控制(包括追踪行驶开始控制)等。以这种方式,可以进行旨在实现车辆自主行驶而不依赖于驾驶员的操作的自动驾驶等的协调控制。
例如,基于从成像部12101~12104获得的距离信息,微型计算机12051可以将立体物的立体物数据分类为两轮车辆、普通车辆、大型车辆、行人和诸如电线杆等其他立体物、提取数据,并且利用该数据自动避开障碍物。例如,微型计算机12051将车辆12100周围的障碍物分类为车辆12100的驾驶员可以看到的障碍物和驾驶员难以看到的障碍物。然后,微型计算机12051确定指示与各障碍物碰撞的危险度的碰撞风险。当碰撞风险等于或高于设定值并且因此存在碰撞的可能性时,微型计算机12051可以通过经由音频扬声器12061或显示部12062向驾驶者输出警告或者通过经由驱动系统控制单元12010进行强制减速或回避转向,进行碰撞避免的驾驶辅助。
成像部12101~12104中的至少一个可以是检测红外线的红外相机。例如,微型计算机12051可以确定由成像部12101~12104拍摄的图像是否包括行人,并且识别行人。例如,识别行人的方法包括提取由作为红外相机的成像部12101~12104拍摄的图像中的特征点的步骤以及对指示物体的轮廓的一系列特征点进行图案匹配处理从而确定该物体是否为行人的步骤。当微型计算机12051确定由成像部12101~12104拍摄的图像包括行人,并且识别出行人时,声音/图像输出部12052控制显示部12062,使得在所识别的行人上显示叠加的四边形轮廓线,以强调行人。此外,声音/图像输出部12052可以控制显示部12062,使得在期望的位置显示指示行人的图标等。
此外,在本说明书中,系统表示由多个设备构成的整个设备。
应当注意,本说明书中记载的效果仅仅是示例性的而非限制性的,并且可以具有其他的效果。
应当注意,本技术的实施方案不限于上述实施方案,并且在不脱离本技术的要旨的情况下可以进行各种变更。
注意,本技术还可以具有以下构成。
(1)一种测距装置,包括:
发光部,其发出照射光;
受光部,其接收由所述照射光在目标对象上的反射而产生的反射光;
计算部,其基于从所述照射光的发出到所述反射光的接收的时间来计算距所述目标对象的距离;和
发光控制部,其控制所述发光部,
其中所述发光控制部通过在预定的帧内切换第一发光模式和不同于第一发光模式的第二发光模式来控制所述发光部的发光。
(2)根据(1)所述的测距装置,其中
所述发光控制部随机地切换第一发光模式和第二发光模式。
(3)根据(1)或(2)所述的测距装置,其中
所述预定的帧具有第一子帧和第二子帧,和
所述发光控制部在第一子帧中适用第一发光模式并且在第二子帧中适用第二发光模式。
(4)根据(1)~(3)中任一项所述的测距装置,其中
所述发光部发出脉冲光,和
第一发光模式和第二发光模式在所述脉冲光的相位方面不同。
(5)根据(4)所述的测距装置,其中
所述相位被离散地或连续地设定。
(6)根据(4)所述的测距装置,其中
所述相位是0度、90度、180度和270度中的任何一个。
(7)根据(1)~(3)中任一项所述的测距装置,其中
所述发光部发出脉冲光,和
第一发光模式和第二发光模式在所述脉冲光的开始发出的时机方面不同。
(8)根据(3)所述的测距装置,其中
第一子帧和第二子帧的期间长度不同。
(9)根据(1)~(8)中任一项所述的测距装置,其中
所述发光控制部基于所存储的关于发光模式的顺序的信息来切换第一发光模式和第二发光模式。
(10)根据(1)~(9)中任一项所述的测距装置,其中
在所述预定的帧中,所述测距装置将通过由所述受光部接收所述反射光而产生的电荷分配到第一抽头和第二抽头,并且根据在第一抽头中累积的电荷来检测第一检测信号和根据在第二抽头中累积的电荷来检测第二检测信号;
在所述预定的帧接着的帧中,所述测距装置将通过由所述受光部接收所述反射光而产生的电荷分配到第一抽头和第二抽头,并且根据在第一抽头中累积的电荷来检测第三检测信号和根据在第二抽头中累积的电荷来检测第四检测信号;和
所述计算部使用第一至第四检测信号来计算距所述目标对象的距离。
(11)根据(1)~(9)中任一项所述的测距装置,其中
在所述预定的帧中,所述测距装置将通过由所述受光部接收所述反射光而产生的电荷分配到第一至第四抽头,并且根据在第一抽头中累积的电荷来检测第一检测信号、根据在第二抽头中累积的电荷来检测第二检测信号、根据在第三抽头中累积的电荷来检测第三检测信号和根据在第四抽头中累积的电荷来检测第四检测信号,和
所述计算部使用第一至第四检测信号来计算距所述目标对象的距离。
(12)根据(1)~(11)中任一项所述的测距装置,其中
所述测距装置是间接型飞行时间(TOF)传感器。
(13)根据(1)~(11)中任一项所述的测距装置,其中
所述测距装置是直接型飞行时间(TOF)传感器。
(14)根据(1)~(13)中任一项所述的测距装置,其中
所述发光控制部通过在所述预定的帧内切换第一发光模式、第二发光模式、不同于第一和第二发光模式的第三发光模式以及不同于第一至第三发光模式的第四发光模式来控制所述发光部的发光。
(15)根据(14)所述的测距装置,其中
第二发光模式与第一发光模式在相位上相差90度,
第三发光模式与第一发光模式在相位上相差180度,和
第四发光模式与第一发光模式在相位上相差270度。
(16)一种测距方法,包括由执行距离测量处理的测距装置实施的以下步骤:
发出照射光;
接收由所述照射光在目标对象上的反射而产生的反射光;
基于从所述照射光的发出到所述反射光的接收的时间来计算距所述目标对象的距离;和
控制所述照射光的发出,
其中在所述的发出控制中,在预定的帧内切换第一发光模式和不同于第一发光模式的第二发光模式以控制发光。
(17)一种使执行距离测量处理的测距装置的计算机实施处理的程序,包括:
发出照射光;
接收由所述照射光在目标对象上的反射而产生的反射光;
基于从所述照射光的发出到所述反射光的接收的时间来计算距所述目标对象的距离;和
控制所述照射光的发出,
所述处理包括在所述的发出控制期间,在预定的帧内切换第一发光模式和不同于第一发光模式的第二发光模式以控制发光。
附图标记列表
10 测距装置
11 透镜
12 受光部
13 信号处理部
14 发光部
15 发光控制部
21 模式切换部
22 距离图像生成部
31 光电二极管
41 像素阵列部
42 垂直驱动部
43 列处理部
44 水平驱动部
45 系统控制部
46 像素驱动线
47 垂直信号线
48 信号处理部
50 像素
51 抽头
61 光电二极管
62 传输晶体管
63 FD部
64 选择晶体管
65 复位晶体管
81 物体
- 测距装置、测距方法、测距程序及测距系统以及拍摄装置
- 测距校正装置、测距校正系统、测距校正方法和测距校正程序