基于物联网与几何模型的起重机械防碰撞系统及方法
文献发布时间:2023-06-19 12:08:44
技术领域
本申请涉及机械碰撞监测技术领域,特别涉及一种基于物联网与几何模型的起重机械防碰撞系统及方法。
背景技术
起重机械是在一定范围内提升和水平搬运重物的多动作机械,在各行业、领域的应用越来越广泛。起重机械主要包括起升机构、运行机构、变幅机构、回转机构和金属机构等,起升机构是基本的工作机构,大多是由吊挂系统和绞车组成,也有通过液压系统升降重物的;运行机构用以纵向水平运移重物或调整起重机的工作位置;变幅机构配备于起重机械的臂架上;回转机构用以使臂架回转;金属结构是起重机的骨架。
由于起重机械的运动部件较多,工作空间较大,当多起重机械运行时,容易与其它工作设备或建筑物产生碰撞,发生安全事故。
因此,需要提供一种针对上述现有技术不足的改进技术方案。
发明内容
本申请的目的在于提供一种基于物联网与几何模型的起重机械防碰撞系统及方法,以解决或缓解上述现有技术中存在的问题。
为了实现上述目的,本申请提供如下技术方案:
本申请提供了一种基于物联网与几何模型的起重机械防碰撞系统,包括:数据采集单元、物联网网关和数据分析单元;所述数据采集单元和所述数据分析单元分别与物联网网关通讯连接;所述数据采集单元安装于所述起重机械的运动部件上,能够对所述运动部件的位姿进行实时监测,并将监测到的位姿数据通过所述物联网网关发送至所述数据分析单元;所述数据分析单元能够根据接收到的所述位姿数据,对所述数据分析单元中预设的、与所述起重机械对应的几何模型进行同步调整,以对所述起重机械进行同步碰撞检测。
优选的,所述数据分析单元进一步配置为根据接收到的所述位姿数据,对所述数据分析单元中预设的、与所述起重机械对应的几何模型的不同部件之间的距离进行同步计算,以对所述起重机械进行同步碰撞检测。
优选的,所述数据分析单元进一步配置为根据接收到的所述位姿数据,基于所述几何模型的点云数据,对所述几何模型的不同部件之间的距离进行同步批量计算。
优选的,所述数据分析单元进一步配置为根据所述几何模型的不同部件之间的最小距离,对所述起重机械进行同步碰撞检测。
优选的,所述基于物联网与几何模型的起重机械防碰撞系统还包括:报警单元,所述报警单元与所述数据分析单元通讯连接,所述报警单元配置为根据所述数据分析单元发出的报警指令进行报警;其中,响应于所述几何模型的不同部件之间的距离小于预设距离,所述数据分析单元发出所述报警指令。
优选的,所述预设距离为1000毫米。
优选的,所述数据采集单元为编码器;对应的,所述运动部件包括:门架、回转平台、臂架机构和大车;其中,所述门架、所述回转平台、所述臂架机构和所述大车上均安装有所述编码器,分别用于对所述门架、所述回转平台、所述臂架机构和所述大车的位置坐标进行实时监测。
优选的,所述基于物联网与几何模型的起重机械防碰撞系统还包括:碰撞展示单元,与所述数据分析单元通讯连接,配置为基于OpenGL对所述起重机械的碰撞检测进行实时展示。
本申请实施例还提供一种基于物联网与几何模型的起重机械防碰撞方法,包括:对所述起重机械的运动部件的位姿进行实时监测,获取所述运动部件的位姿数据;根据所述位姿数据,对预设的与所述起重机械对应的几何模型进行同步调整,以对所述起重机械进行同步碰撞检测。
优选的,所述根据所述位姿数据,对预设的与所述起重机械对应的几何模型进行同步调整,以对所述起重机械进行同步碰撞检测具体为:根据接收到的所述位姿数据,对预设的与所述起重机械对应的几何模型的不同部件之间的距离进行同步计算,以对所述起重机械进行同步碰撞检测。
有益效果:
本申请实施例提供的技术方案中,通过安装在起重机械的运动部件上的数据采集单元对运动不见得位姿进行实时监测,获取运动部件的位姿数据;根据运动部件的实时位姿数据,对预设的与起重机械相对应的几何模型进行同步调整;通过与起重机械相对应的几何模型的运动干涉分析,实现对起重机械的同步碰撞检测,籍此,消除起重机械运行过程中可能存在的干涉碰撞隐患,有效提高了起重机械的运行安全性。
附图说明
构成本申请的一部分的说明书附图用来提供对本申请的进一步理解,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。其中:
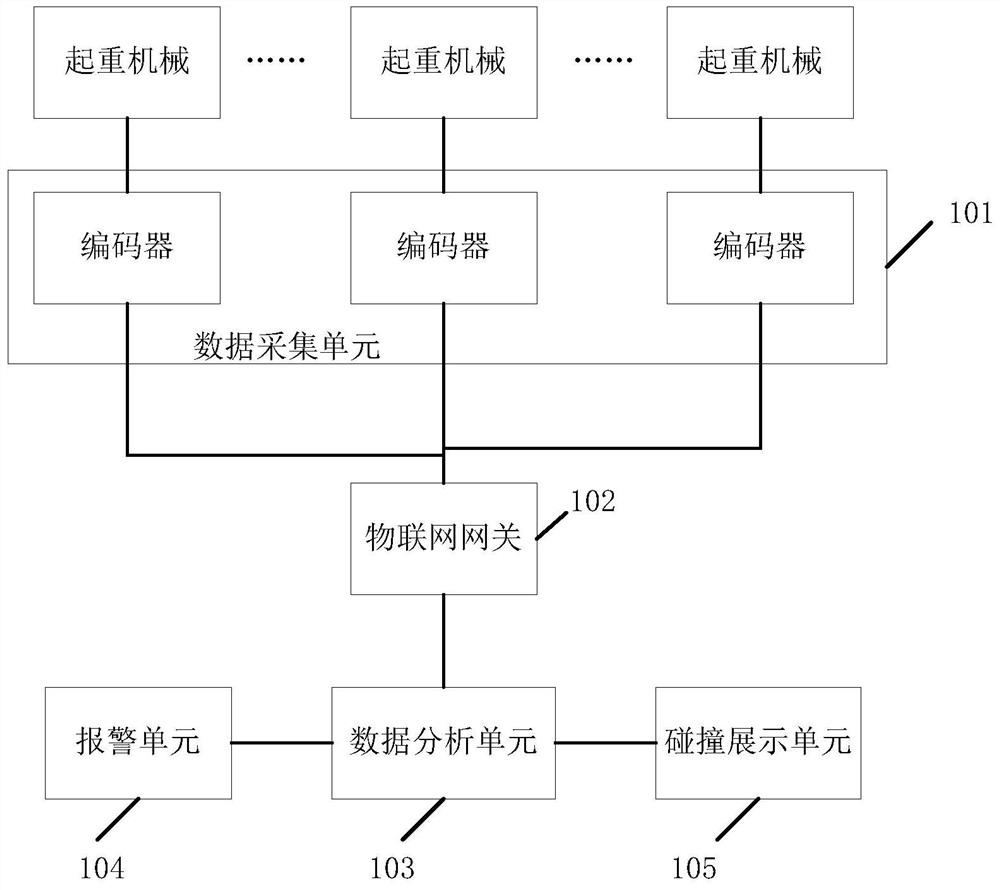
图1为根据本申请的一些实施例提供的一种基于物联网与几何模型的起重机械防碰撞系统的结构示意图;
图2为根据本申请的一些实施例提供的编码器在门式起重机上的安装示意图;
图3为根据本申请的一些实施例提供的编码器在岸桥式起重机上的安装示意图;
图4为根据本申请的一些实施例提供的编码器在门座式起重机上的安装示意图;
图5为根据本申请的一些实施例提供的一种基于物联网与几何模型的起重机械防碰撞方法的流程示意图。
附图标记说明:
101-数据采集单元;102-物联网网关;103-数据分析单元;104-报警单元;105-碰撞展示单元。
具体实施方式
下面将参考附图并结合实施例来详细说明本申请。各个示例通过本申请的解释的方式提供而非限制本申请。实际上,本领域的技术人员将清楚,在不脱离本申请的范围或精神的情况下,可在本申请中进行修改和变型。例如,示为或描述为一个实施例的一部分的特征可用于另一个实施例,以产生又一个实施例。因此,所期望的是,本申请包含归入所附权利要求及其等同物的范围内的此类修改和变型。
在本申请的描述中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请而不是要求本申请必须以特定的方位构造和操作,因此不能理解为对本申请的限制。本申请中使用的术语“相连”、“连接”、“设置”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是直接相连,也可以通过中间部件间接相连;可以是有线电连接、无线电连接,也可以是无线通信信号连接,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
图1为根据本申请的一些实施例提供的一种基于物联网与几何模型的起重机械防碰撞系统的结构示意图;如图1所示,该基于物联网与几何模型的起重机械防碰撞系统包括:数据采集单元101、物联网网关102和数据分析单元103;所示数据采集单元101和数据分析单元103分别与物联网网关102通讯连接;数据采集单元101安装于起重机械的运动部件上,能够对运动部件的位姿进行实时监测,并将监测到的位姿数据通过物联网网关102发送至数据分析单元103;数据分析单元103能够根据接收到的位姿数据,对数据分析单元103中预设的、与起重机械对应的几何模型进行同步调整,以对起重机械进行同步碰撞检测。
在本申请实施中,通过物联网网关102将数据采集单元101和数据分析单元103连接起来,使得数据采集单元101、数据分析单元103中不同类型的感知网络可有快速的进行协议转换,互联互通,实现对不同、多台起重机械的远程控制。
在本申请实施例中,数据采集单元101可以采用编码器,比如:旋转编码器、角度传感器等,以针对不同运动形式的运动部件的位姿进行实时监测。当起重机械为门式起重机(如图2所示)或岸桥式起重机时(如图3所示),编码器主要安装于其行走机构上,比如,将旋转编码器设置在起重机械的行走机构上,具体的,与行走机构的行走轮同轴设置,籍此,有效的对起重机械在行走轨道上的位置进行实时监测。
在本申请实施例中,当起重机械为门座式起重机时(如图4所示),其运动部件主要为:门架、回转平台、臂架机构和大车;其中,门架、回转平台、臂架机构和大车上均安装由编码器,分别用于对门架、回转平台、臂架机构和大车的位置坐标进行实时监测。在此,将角度传感器设置在门座式起重机械的回转平台上(比如,回转支撑),籍此,实现对门座式起重机械的回转角度进行实时监测。或者,将角度传感器设置在门座式起重机械的臂架机构上,籍此,有效实现对臂架机构的俯仰角度的实时监测。
在本申请实施例中,门座式起重机的臂架机构为臂架、人字架、大拉杆和小拉杆组成的四连杆机构,编码器可设置于驱动臂架结构运动的齿轮齿条上,籍以通过齿轮齿条的位移,获取臂架机构的位姿数据(确定四连杆机构的位置)。
在本申请实施例中,数据采集单元101采集到的运动部件的位姿数据包括运动部件的实时位置和姿态的数据,位姿数据可以存储于存储单元中,由数据分析单元103连接存储单元中Mysql数据库对位姿数据进行实时查询。其中,数据分析单元103对位姿数据的查询频率可根据起重机械的运行状态进行实时调整。位姿数据在存储单元中至少保存半年时间,并能够由数据分析单元103对任意时间的数据进行调用,以对位姿数据与起重机械的几何模型的实时联动进行回放、分析。
在一些可选实施例中,数据分析单元103进一步配置为根据接收到的位姿数据,对数据分析单元103中预设的、与起重机械对应的几何模型的不同部件之间的距离进行同步计算,以对起重机械进行同步碰撞检测。具体的,数据分析单元103根据接收到的位姿数据,基于几何模型的点云数据,对几何模型的不同部件之间的距离进行同步批量计算。进一步的,根据几何模型的不同部件之间的最小距离,对起重机械进行同步碰撞检测。
在本申请实施例中,起重机械的几何模型可通过相关的建模软件进行三维建模,并存储在数据分析单元103中,当需要对起重机械进行碰撞干涉检查时,可实时调用存储的三维模型和Mysql数据库中的位姿数据进行分析。几何模型的点云数据,可通过对起重机械的三维模型进行网格划分,到处网格划分后的点云图,得到几何模型的点云数据。
在一些可选实施例中,基于物联网与几何模型的起重机械防碰撞系统还包括:报警单元104,报警单元104与数据分析单元103通讯连接,报警单元104配置为根据数据分析单元103发出的报警指令进行报警;其中,响应于几何模型的不同部件之间的距离小于预设距离,数据分析单元103发出报警指令。具体的,预设距离为1000毫米。
在本申请实施例中,数据分析单元103根据起重机械的运动部件的位姿数据,利用几何模型的点云数据,计算几何模型上与运动部件相对应处所有点之间的最短距离。当计算出的距离小于1000毫米时,数据分析单元103发出报警指令,由报警单元104进行报警。其中,预设距离可以根据起重机械的运行状态进行调整、设定。报警单元104可通过声、光、电等不同形式进行报警提,比如,当距离小于预设距离时,点云数据中点的颜色根据距离的远近进行渐变,以由相关人员及时作出应对。
在本申请实施例中,基于物联网与几何模型的起重机械防碰撞系统还包括:碰撞展示单元105,与数据分析单元103通讯连接,配置为基于OpenGL对起重机械的碰撞检测进行实时展示。籍此,通过OpenGL对起重机械的实时运行进行显示,有效提高起重机械的碰撞检测的直观性。此外,还可以通过计算机辅助设计软件的二次开发、通过几何模型的几何尺寸等对起重机械进行干涉碰撞检测,在此不再一一赘述。
在本申请实施例中,通过安装在起重机械的运动部件上的数据采集单元101对运动不见得位姿进行实时监测,获取运动部件的位姿数据;根据运动部件的实时位姿数据,对预设的与起重机械相对应的几何模型进行同步调整;通过与起重机械相对应的几何模型的运动干涉分析,实现对起重机械的同步碰撞检测,籍此,消除起重机械运行过程中可能存在的干涉碰撞隐患,有效提高了起重机械的运行安全性。
图5为根据本申请的一些实施例提供的一种基于物联网与几何模型的起重机械防碰撞方法的流程示意图;如图5所示,该基于物联网与几何模型的的起重机械防碰撞方法包括:
步骤S101、对起重机械的运动部件的位姿进行实时监测,获取运动部件的位姿数据;
在本申请实施例中,通过物联网网关对不同类型的感知网络采集到的位姿数据进行协议转换,实现不同类型数据之间的互联互通,有效提高对不同、多台起重机械的远程控制效率。
在本申请实施例中,运动部件的位姿数据包括运动部件的实时位置和姿态的数据,位姿数据可以存储于Mysql数据库中,以备随时调用。起重,位姿数据至少保存半年时间,并能够在任意时间对数据进行调用,以对位姿数据与起重机械的几何模型的实时联动进行回放、分析。
步骤S102、根据位姿数据,对预设的与起重机械对应的几何模型进行同步调整,以对起重机械进行同步碰撞检测。
在一些可选实施例中,步骤S102具体为:根据接收到的位姿数据,对预设的与起重机械对应的几何模型的不同部件之间的距离进行同步计算,以对起重机械进行同步碰撞检测。优选的,根据接收到的位姿数据,基于几何模型的点云数据,对几何模型的不同部件之间的距离进行同步批量计算。进一步的,根据几何模型的不同部件之间的最小距离,对起重机械进行同步碰撞检测。
本申请实施例提供的基于物联网与几何模型的起重机械防碰撞方法能够实现上述任一实施例的基于物联网与几何模型的起重机械防碰撞系统的技术效果,在此不再一一赘述。
以上所述仅为本申请的优选实施例,并不用于限制本申请,对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。
- 基于物联网与几何模型的起重机械防碰撞系统及方法
- 基于几何模型的管路系统流体动力学模型生成系统及方法