一种EGR废气再循环缓关阀系统与方法
文献发布时间:2023-06-19 19:07:35
技术领域
本发明涉及内燃机控制技术领域,特别涉及一种涉及内燃机EGR系统中为防止EGR阀杆冲击阀座的系统。
背景技术
传统汽油机在高速大负荷区域通常是通过加浓的方式来降低燃烧温度、降低NO
但是在小负荷区域,考虑到燃烧稳定性,不引入外部EGR;在低速大负荷区域,由于进排气压差不足无法引入外部EGR。
因此,在实际应用过程中,发动机的工况一直在变化,必然会面临EGR频繁开关的情况,落座太快会产生冲击,影响零部件耐久。
发明内容
有鉴于此,本发明提供了一种EGR废气再循环缓关阀系统与方法,使用分段多速率的EGR阀杆组缓关阀策略,解决了EGR阀杆冲击阀座的问题。
为实现上述目的,本发明提供如下技术方案:
一种EGR废气再循环缓关阀方法,其特征在于,包括步骤:
A:获取EGR阀杆的实际位置L;
B:按照所述实际位置L,判断所述EGR阀杆所处的位置段;所述位置段至少包括:全开位置至初始位置L
C:根据所述位置段,控制所述EGR阀杆以对应速率回位;所述第一区间对应的回位速率大于所述第二区间对应的回位速率。
优选的,在所述步骤B中,所述第一区间为全开位置至初始位置L
所述初始位置L
优选的,所述步骤C包括:
当所述位置段为PID闭环自由调节区间时,以目标位置L
当所述位置段为PID闭环缓速调节区间时,以初始位置L
优选的,在所述步骤B中,所述位置段还包括:结束位置L
所述第三区间为开环控制,以固定占空比驱动至零点。
优选的,所述步骤C包括:
当所述位置段为开环落座区间时,以固定的驱动占空比对所述EGR阀杆进行开环控制,至全关落座。
优选的,所述步骤C包括:
S1:判断目标位置L
S2:以目标位置L
S3:以初始位置L
S4:判断目标位置L
S5:以步骤S3的实时目标位置L
S6:以步骤S3的实时目标位置L
S7:以固定的驱动占空比进行开环控制,实现所述EGR阀杆的全关落座。
优选的,所述步骤A包括:
通过EGR位置传感器实时采集EGR阀杆位置L。
优选的,在所述步骤A之前,还包括步骤:
在收到关闭指令时,获取目标位置L
一种EGR废气再循环缓关阀系统,采用如上述的EGR废气再循环缓关阀方法,包括:EGR位置采集器和控制模块;
所述EGR位置采集器能够采集EGR阀杆的实际位置L,并发送给所述控制模块;
所述控制模块能够按照所述实际位置L,判断所述EGR阀杆所处的位置段;所述位置段至少包括:全开位置至初始位置L
所述控制模块还能够根据所述位置段,控制所述EGR阀杆以对应速率回位;所述PID闭环缓速调节区间对应的回位速率小于所述PID闭环自由调节区间对应的回位速率。
优选的,所述EGR位置采集器包括:EGR位置传感器,和/或,所述控制模块集成在ECU控制器中。
从上述的技术方案可以看出,本发明提供的EGR废气再循环缓关阀系统与方法,通过采集实时EGR阀杆位置,输入给ECU控制器,使得ECU控制器能够按照EGR阀杆当前位置,在不同的位置使用不同的速率控制EGR阀杆,使得在靠近EGR阀座的位置降低回位速率,达到保护零件的效果。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例提供的EGR系统的简要结构示意图;
图2为本发明实施例提供的EGR阀的位置控制示意图;
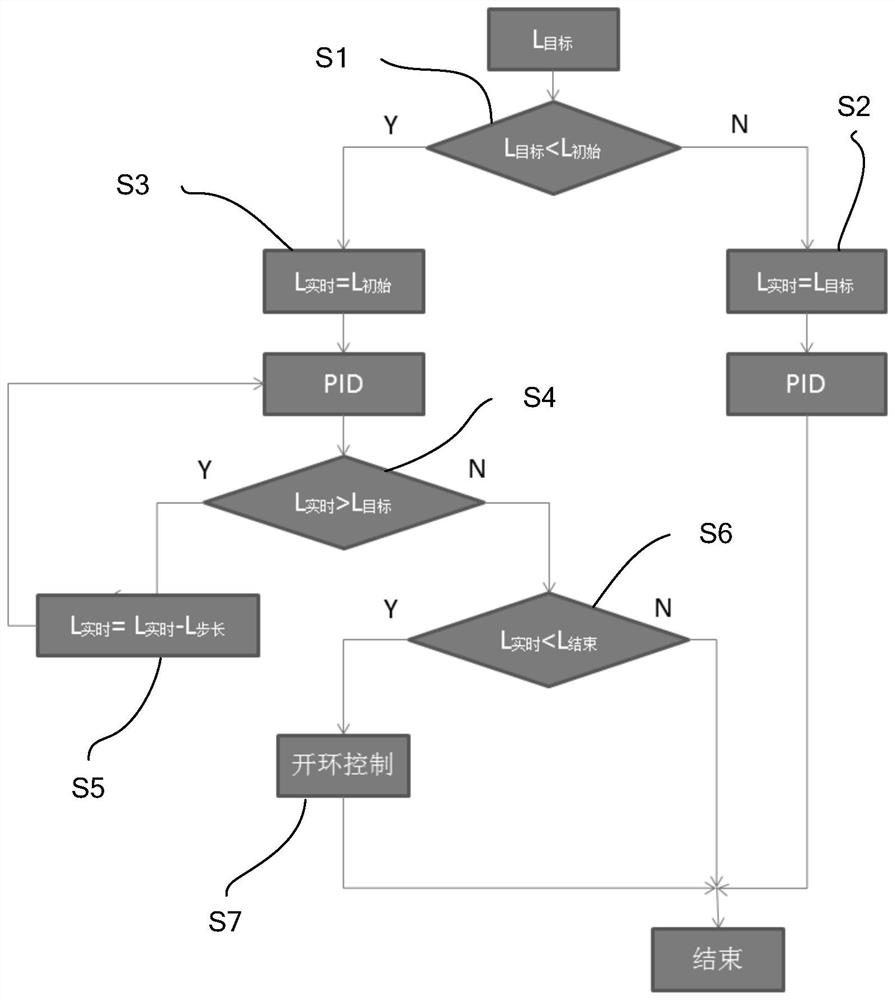
图3为本发明实施例提供的EGR阀落座控制逻辑框图。
其中,1.EGR阀驱动电机;2.小齿轮;3.大齿轮;4凸轮;5.EGR阀杆;6.回位弹簧;7.EGR阀座;8.EGR位置传感器;9.ECU控制器。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明实施例提供的EGR废气再循环缓关阀方法,包括步骤:
A:获取EGR阀杆5的实际位置L;
B:按照实际位置L,判断EGR阀杆5所处的位置段;该位置段至少包括:全开位置至初始位置L
C:根据位置段,控制EGR阀杆以对应速率回位至目标位置L
从上述的技术方案可以看出,本发明实施例提供的EGR废气再循环缓关阀系统与方法,通过采集实时EGR阀杆5位置,输入给ECU控制器9,使得ECU控制器9能够按照EGR阀杆5当前位置,在不同的位置使用不同的速率控制EGR阀杆5,使得在靠近EGR阀座7的位置降低回位速率,达到保护零件的效果。
作为优选,在步骤B中,第一区间为全开位置至初始位置L
初始位置L
进一步的,步骤C包括:
当位置段为PID闭环自由调节区间时,以目标位置L
当位置段为PID闭环缓速调节区间时,以初始位置L
具体的,在步骤B中,上述的位置段还包括:结束位置L
第三区间(结束位置至零位)为开环控制,以固定占空比(本项目中是-20%)驱动至零点,目的在于使阀关死。进一步优化了本发明分段多速率的EGR阀杆组缓关阀策略。
在本实施例中,步骤C包括:
当位置段为开环落座区间时,以固定的驱动占空比对EGR阀杆5进行开环控制,至全关落座。如此设置,从而实现第三区间与第二区间和第一区间的分段多速率控制。
如图3所述,本方案采用判断逻辑和分步控制,其步骤C包括:
S1:判断目标位置L
S2:以目标位置L
S3:以初始位置L
S4:判断目标位置L
S5:以步骤S3的实时目标位置L
S6:以步骤S3的实时目标位置L
S7:以固定的驱动占空比进行开环控制,实现EGR阀杆5的全关落座;对应前述第三区间。
作为优选,步骤A包括:
通过EGR位置传感器8实时采集EGR阀杆5位置L。
进一步的,在步骤A之前,还包括步骤:
在收到关闭指令时,获取目标位置L
本发明实施例还提供了一种EGR废气再循环缓关阀系统,采用如上述的EGR废气再循环缓关阀方法,包括:EGR位置采集器和控制模块;
EGR位置采集器能够采集EGR阀杆5的实际位置L,并发送给控制模块;
控制模块能够按照实际位置L,判断EGR阀杆5所处的位置段;位置段至少包括:全开位置至初始位置L
控制模块还能够根据位置段,控制EGR阀杆5以对应速率回位;PID闭环缓速调节区间对应的回位速率小于PID闭环自由调节区间对应的回位速率。
具体的,EGR位置采集器包括:EGR位置传感器8,和/或,控制模块集成在ECU控制器9中,即其以软件功能模块的形式集成在发动机控制系统中。
下面结合具体实施例对本方案作进一步介绍:
1)根据位置控制方式的不同,将EGR阀的行程划分为三个区间(见附图2):PID闭环自由调节区间(全开位置至初始位置L
2)本发明适用于EGR阀的落座过程,因此EGR阀的实际位置L大于目标位置L
3)当目标位置L
4)当目标位置L
5)当目标位置L
附表1相关符号及含义
综上所述,本发明提供的EGR废气再循环缓关阀系统与方法,通过采集实时EGR阀杆位置,输入给ECU控制器,使得ECU控制器能够按照EGR阀杆当前位置,在不同的位置使用不同的速率控制EGR阀杆,使得在靠近EGR阀座的位置降低回位速率,达到保护零件的效果。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 车载柴油机废气再循环系统冷端EGR阀保护系统及其保护方法
- 车载柴油机废气再循环系统冷端EGR阀保护系统及其保护方法