一种可长时值守的旋翼无人机
文献发布时间:2023-06-19 19:27:02
技术领域
本申请属于无人飞行器技术领域,具体涉及一种可长时值守的旋翼无人机。
背景技术
旋翼电动无人机可垂直起降,对起降场地要求不高,且飞行噪声小,机动能力强,是执行秘密侦查任务的有效手段,尤其是在复杂城市环境中,可作为一种潜伏式侦查手段,例如无人机潜伏在城市高楼中某个高点,执行长时侦查任务,携带战斗部的无人机,在发现合适时机甚至可以执行打击任务。但是,旋翼电动无人机存在一个很大的缺点,就是续航时间短,大大缩短了潜伏式侦查的时间,导致在很大的程度上限制了无人机的功能使用。
发明内容
针对现有旋翼电动无人机续航时间短,无法有效执行潜伏式侦查任务的问题,本申请提供一种可长时值守的旋翼电动无人机,通过将环境风带动螺旋桨摆动产生的机械能转化为电能,利用电调的集电功能反向给储能装置或者电池充电,从而实现给侦查载荷甚至旋翼动力供电,达到提升其续航能力的目的。
为实现上述目的,本申请提供以下技术方案:
一种可长时值守的旋翼无人机,包括机体、多组动力系统、多个起落架,所述动力系统包括电机、电调、螺旋桨和储能装置,所述动力系统安装在所述机体上,所述电调具备两种可以切换的工作模式,分别为电机驱动模式和集电模式。
优选地,还包括多个旋翼臂,每个所述螺旋桨通过旋翼臂安装于所述机体。
优选地,所述起落架的底部设置有真空吸盘。
优选地,所述机体内安装有侦查载荷和打击载荷。
优选地,所述侦查载荷为常规可见光相机和/或红外相机。
优选地,所述电调包括集电模块和驱动模块,所述集电模块和驱动模块并联连接后,一端与所述电机相连,另一端与所述所述储能装置相连,所述集电模块包括依次串联连接的集电桥、整流电路和变压电路,所述驱动模块包括依次串联连接的驱动桥和电调控制器。
优选地,所述电调处于驱动模式时,电调消耗储能装置,储能装置中的电能通过驱动桥驱动电机旋转。
优选地,所述电调处于集电模式时,电调控制器关闭驱动桥,开启集电桥,使电机三相连接至集电电路,电子转子在桨的带动下做摆动,转子和定子相互切割产生感应电动势,通过闭路产生感应电流,再通过整流电路、变压电路,将电机转动产生的交变电压转换为可供储能装置充电的电压,从而给储能装置供电。
总体而言,通过本发明所构思的以上技术方案的有益效果是:
1.在常规旋翼的基础上增加了可吸附式起落架,利用吸附式起落架使无人机可吸附悬停在大厦的高点,进行侦查的同时还可采集风能,利用高空风带动螺旋桨的旋转,产生电能,给无人机储能装置充能,从而提升无人机的工作时长;
2.可以切换模式的电调,在常规驱动模式下可正常驱动电机按指定转速旋转,在集电模式下可以收集感应电能进而给无人机的储能装置充能;
3.利用旋翼无人机原有的螺旋桨、电机和电调,在不额外增加装置的前提下实现充能,结构简单,为无人机提供了一种经济且可持续的补能方式。
附图说明
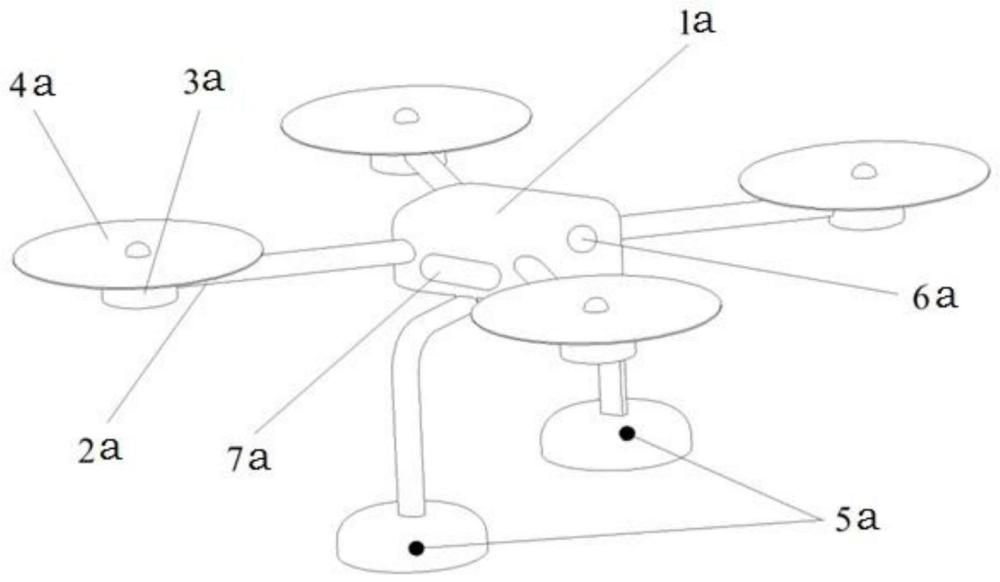
图1是本发明一实施例中提供的一种可长时值守的旋翼无人机结构示意图;
图2是本发明一实施例中提供的一种可收集电能的电调原理图。
在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:
1a-机体、2a-旋翼臂、3a-电机、4a-螺旋桨、5a-起落架、6a-侦查载荷、7a-打击载荷、1-储能装置、2-电调、3-集电电路MOS管、4-集电模块、5-驱动模块、6-电调控制器、7-驱动桥、8-驱动桥控制信号、9-集电电路开关信号、10-电调电源输入、11-集电桥、12-整流电路、13-变压电路、14-充电输入端口、15-供电输出端口、16-驱动电路MOS管。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
在本发明的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制;另外,在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
如图1所示,本发明提供的一种可长时值守的旋翼无人机,包括机体、多组动力系统、多个起落架,其中,动力系统安装在机体上,包括电机、电调、螺旋桨和储能装置,本实施例中,为四旋翼无人机,起落架为两个,动力系统为四组,四个螺旋桨周向对称布置于机体,通过旋翼臂固定安装于机体上,电机设置在螺旋桨下部,每个电机的输出轴与螺旋桨同轴连接,电机的转动可带动螺旋桨的旋转,每个旋翼臂上还固定安装有电调和储能装置,本实施例中,储能装置为可充电电池,每个旋翼臂上的可充电电池、电调和电机均电连接。在机体的内部,安装有侦查载荷和打击载荷以使无人机具有侦查和打击功能,其中,侦查载荷为常规可见光相机或者红外相机,或者同时安装常规可见光相机和红外相机。为了使无人机可吸附在光滑的表面上,在起落架的底部固定设置有真空吸盘。
如图2所示,该申请还提供了一种可切换模式的电调,包括集电模块和驱动模块,集电模块和驱动模块并联连接后,一端与电机相连,另一端与储能装置相连,集电模块包括依次串联连接的集电桥、整流电路和变压电路,驱动模块包括依次串联连接的驱动桥和电调控制器,集电桥和驱动桥均由MOS管构成。本申请中的电调具有常规的电机驱动模式和集电模式两种模式,通过电调控制器来控制两种模式的切换,电调控制器可以为单片机,单片机通过运行电调控制程序来完成两种模式的切换。在电机驱动模式下,电调消耗动力电池,通过驱动桥驱动电机按指定转速旋转;在集电模式下,电调关闭驱动桥,开启集电桥,使得电机的三相连接至集电电路,由于螺旋桨和电机的转子是同轴固定连接的,当外部风能带动螺旋桨摆动时,电机转子在螺旋桨的带动下做摆动运动,转子和定子相互切割产生感应电动势,通过闭路产生感应电流,再通过整流电路、变压电路,将电机产生的交变电压转换为可供储能装置或者动力电池充电的电压,从而给储能装置或动力电池供电。
总而言之,本发明提出的一种可长时值守的旋翼无人机可选择一个城市环境中的高点悬停,例如大厦的高层外壁,利用吸盘式起落架吸附在光滑外壁上,开启侦查载荷,且电调切换至集电模式,既可以在相对开阔的视场环境下执行侦查,又可以更好地收集高空中的风能;将风能转化为电能,具体方式为风能带动螺旋桨摆动,进而带动电机转子摆转,电机转子相对定子转动时会产生感应电动势,电调切换至集电模式,将该感应电动势转换为电能,并通过整流、变压电路,产生可以对储能装置充电的电压,给储能装置充电,从而增加无人机侦查的工作时间;若风能足够强大,产生的电能甚至能给动力电池充电,提升无人机的飞行时间。
本发明不局限于上述实施方式,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围之内。本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。