一种带机械臂末端可扩展的轻型自主摘果空中机器人
文献发布时间:2023-06-19 19:27:02
技术领域
本发明涉及空中机器人技术领域,具体涉及一种带机械臂末端可扩展的轻型自主摘果空中机器人。
背景技术
近年来,作业型空中机器人因与环境进行物理交互而被广泛研究,多数研究仅仅实现了单一的“拿-放”的简单抓取任务,采摘抓取作业实现暂时很少。对于高空果实的采摘,如摘松果等不利于人类作业的环境,目前主要是工人采摘,这种人工作业不仅危险而且效率极低。
当前用于农业的作业型空中机器人多采用连杆机构进行破膜和切割操作,作业机构末端依赖于无人机平台的调整,灵活度受限制。其中,作业机构与无人机平台直接连接的刚性直连式机器人精度较低,并联式机器人因多个机械臂并联导致负载过大,较常用的是单机械臂的串联式机器人。目前,携带多自由度机械臂的串联式空中机器人,灵活度有所增加,但重量依旧过大,导致机器人能耗大、飞行作业时间短。更重要的一点是机械臂末端多以不变的刚性抓手为主,而果实大小形状软硬不一,摘取时需替换夹爪,单一刚性抓手普适性较差。因此,对于高空摘果任务,需要一种新的解决方案。
发明内容
为解决上述人工摘果危险、效率低、作业型空中机器人负载大、作业时间短和机械臂末端抓手适应性较差等问题,本发明提供了一种带机械臂末端可扩展的轻型自主摘果空中机器人,在满足接触摘果的强度要求下,结构简单、质量轻便、有效降低负载,提高了机器人作业时间。通过扩展机械臂末端的夹爪结构实现多种果实摘取作业,利用单目相机采集图像,经识别定位后通过控制系统规划机器人抓取可提供自主摘果作业方式,有效降低成本、安全性高,易于推广使用。
为实现上述目的,本发明提供如下技术方案:
一种带机械臂末端可扩展的轻型自主摘果空中机器人,包括四旋翼无人机、单目相机和四自由度机械臂。所述四旋翼无人机底部通过挂板在作业前端安装单目相机、中心安装四自由度机械臂,顶部装有机载控制系统。
所述的四自由度机械臂与四旋翼无人机串联,其包括二自由度的双关节机械臂以及末端可扩展的二自由度机械爪。
所述的二自由度双关节机械臂包括主臂、副臂、挂臂板和舵机,主臂一端与挂臂板连接,其关节由第一舵机驱动,挂臂板与无人机底板在中心固定连接,另一端通过第二舵机安装副臂,副臂由第二舵机驱动以调节关节角度,机械臂末端通过第三舵机安装机械爪,整个机械臂的主副臂材料使用预浸料碳纤维实心板、结构采用多孔镂空设计,满足摘果接触任务,强度保证的同时有效降低载荷,实现轻量化设计提高了机器人作业时间。
所述的二自由度机械爪包括角接板、爪盘、主动齿杆、从动齿杆、连杆、可扩展夹爪和舵机,机械爪通过第三舵机与机械臂相连,舵机旋转带动机械爪旋转拧取果实。进一步的,角接板固定在爪盘二侧与第三舵机固定连接,爪盘上安装二齿杆,爪盘下安装第四舵机、舵机连接主动齿杆,主动齿杆通过啮合带动从动齿杆,齿杆与连杆共同连接夹爪运动,处于目标位置时,保证夹取牢靠。
所述的夹爪可扩展、能更换不同类型夹爪,夹爪抓取面锯齿形状设计,增大摩擦力,楔形锯齿面夹爪采用硬性材料设计,夹取硬果实;方形锯齿面夹爪采用柔性材料设计,夹取软果实,以此有效扩展实用性。
所述的单目相机挂载在四旋翼无人机底板的前端,首先由四旋翼无人机搭载装置飞行到指定工作区域附近,单目相机对目标物进行图像采集,其次图像信息经过计算处理识别后若符合条件,四旋翼无人机读取位姿信息靠近果实,此时机载控制系统为机械臂发出规划指令,控制各个主臂副臂的关节和第四舵机准确夹持果实,最后由第三舵机旋转拧取实现自主摘果。
进一步的,所述机载控制系统使用微处理器STM32F427做主控芯片,图像信息经过计算单元计算识别后,控制系统自主通过测高模块和9轴传感器模块采集机器人实时的位姿数据,对其处理后产生指令进行传输控制四个旋翼电机调整位姿到目标物处,机械臂的线速度计、加速度计和角速度计测量各关节与机械爪的实时位置及姿态角度信息,控制系统对其处理后发出指令来调整四个舵机,舵机通过旋转不同角度进而控制机械臂关机和机械爪实现抓取。
在上述技术方案中,本发明提供的一种带机械臂末端可扩展的轻型自主摘果空中机器人,具有以下有益效果:
1、该发明的机械爪夹取面不同形状锯齿设计,基于多种功能需求扩展不同的机械臂末端夹爪,有效保护果实的完整度,不仅实现了果实种类可摘取的多样性,而且降低摘果机器人成本。
2、该发明采用材料与结构轻量化设计,机械臂使用预浸料碳纤维实心板材料制作、结构采用多孔镂空设计,以此有效降低重量、减少高空中机器人能耗、提高了作业时间。
3、该发明摆脱高度束缚,经过图像识别定位目标物后机载控制系统可控制机械臂实现自主摘果,有效降低人工摘果危险、提高效率。
附图说明
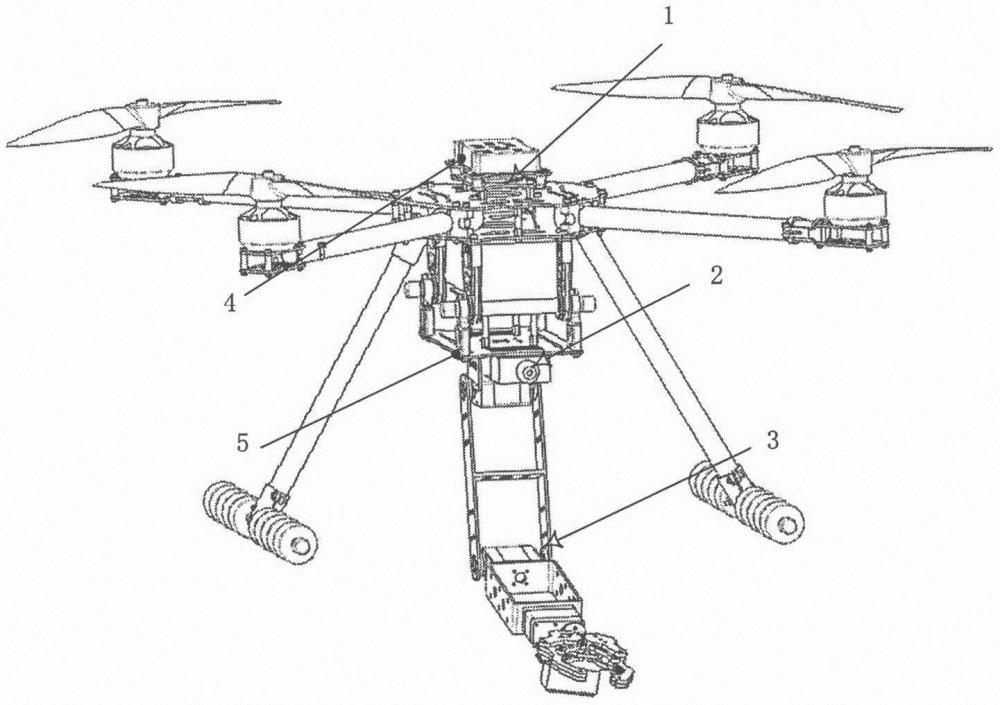
图1为本发明整体结构示意图;
图2为本发明机械臂结构示意图;
图3为本发明末端可扩展方形锯齿机械爪结构示意图;
图4为本发明末端可扩展楔形锯齿机械爪结构示意图;
图5为本发明自主摘果作业流程图;
图6为本发明系统硬件架构图;
附图标记:1、四旋翼无人机;2、单目相机;3、机械臂系统;4、机载控制系统;5、底板;6、挂臂板;7、第一舵机;8、主臂;9、第二舵机;10、副臂;11、第三舵机;12、机械爪;13、楔形锯齿夹爪;14、角接板;15、爪盘;16、主动齿杆;17、第四舵机;18、从动齿杆;19、连杆;20、方形锯齿夹爪。
具体实施方式
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将结合附图对本发明作进一步的详细介绍。
本发明提供的一种带机械臂末端可扩展的轻型自主摘果空中机器人,如图1所示,所述四旋翼无人机1底部通过挂板5在作业前端安装单目相机2、中心安装四自由度机械臂3,顶部装有机载控制系统4。单目相机挂载在四旋翼无人机底板的前端,系统结构相对简单、视野广阔,进行图像采集时计算资源要求不高,所述机载控制系统的计算单元能进行有效的数据处理。
本发明的四自由度机械臂包括二自由度的双关节机械臂以及末端可扩展的二自由度机械爪,机械臂通过挂板与四旋翼无人机进行串联,如图2所示。
其中,二自由度双关节机械臂的主臂8一端与挂臂板6连接,关节由第一舵机7驱动,挂臂板与无人机底板5在中心固定连接,另一端通过第二舵机9安装副臂10,副臂由第二舵机驱动以调节关节角度,机械臂末端通过第三舵机11安装机械爪12,楔形锯齿夹爪13夹取面摩察力大,当单目相机识别到可摘取果实后,机载控制系统规划出机械臂的关节角度,机械臂伸展延长等待抓取。
其中,二自由度机械爪由角接板14、爪盘15、主动齿杆16、从动齿杆18、连杆19、可扩展夹爪和舵机17组成,机械爪通过第三舵机与机械臂相连,舵机旋转带动机械爪旋转拧取果实。角接板固定在爪盘二侧与第三舵机固定连接,爪盘上安装两齿杆,爪盘下安装第四舵机、舵机连接主动齿杆,主动齿杆通过啮合带动从动齿杆,齿杆与连杆共同连接夹爪运动。
其中,如图3所示,夹爪设计成方形锯齿面夹爪20,用柔性材料设计,当采摘柔软果实时,利用此机械爪实现可靠摘取。
其中,图4夹爪设计成楔形锯齿面13,此结构摩擦力较方形锯齿面夹爪更大,适合抓取坚硬的果实。通过末端夹爪结构的扩展,摘果空中机器人可实现了果实多样化摘取,有效降低摘果空中机器人成本。
现对本发明的一种带机械臂末端可扩展的轻型自主摘果空中机器人的自主摘果作业流程进行说明,如图5所示。首先,由四旋翼无人机1搭载装置飞行到指定工作区域附近;单目相机2挂载在四旋翼无人机底板5的前端,对目标物进行图像采集;图像信息经过机载控制系统4计算单元处理识别后,若不符合采摘条件,继续进行图像采集分析;若符合条件,四旋翼无人机依靠相机、超声波、气压计和MPU9250集成传感器读取目标物位置和无人机状态信息以调整机体位姿靠近果实并保持悬停状态;此时机载控制系统对四自由度机械臂3发出规划指令,通过第一舵机7和第二舵机9改变二自由度机械臂关节角、使主臂和副臂伸展到果实所处位置,此时机械爪12开始工作,通过第四舵机17控制主动齿杆16带动从动齿杆18、连杆19与夹爪20进行夹取,最后通过第三舵机11旋转拧取实现自主摘果。
本发明硬件框图如图6所示,采用微处理器STM32F427作为机载控制系统的主控芯片,整机系统由电源34供电;单目相机2采集的图像信息经计算单元21计算识别后,控制系统自主通过相机深度传感器、超声波模块25、气压计模块26和9轴传感器模块27-MPU9250采集机器人实时的位置高度和姿态信息,9轴传感器模块采用InvenSense第二代传感器,集成了加速度计、陀螺仪和磁力计;无线传输模块23与遥控模块24与机体进行通信,可实时观测作业情况;微控制器采集到的信息经处理后产生指令给电子调速器28,28调整四个旋翼无刷电机29的转速,进而调整位姿到目标物处;机械臂的线速度计31、角速度计32和加速度计33测量各关节与机械爪的实时位置及姿态角度信息,机载控制系统对其处理后通过舵机控制器30发出指令来调整四个舵机的转速,舵机7、9调节机械臂关节角使末端到达果实处,舵机11、17旋转不同角度使机械爪实现抓紧拧取功能。
以上,仅为本发明一种具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变或没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
- 全自动塔式空中连续摘果分级包装机
- 一种适用于服务机器人的六自由度机械臂及服务机器人
- 一种机械臂末端治具、摘钩机器人及火车摘钩方法
- 一种空中飞行机器人摘果作业用伞形绞刀