无人驾驶运载工具壳体
文献发布时间:2023-06-19 09:52:39
相关申请的交叉引用
本申请基于2019年6月7日提交的美国申请第16/434,570号,其要求2018年6月14日提交的美国临时申请第62/685,166号的权益,在这里通过引用将这两个申请整体合并于此。
技术领域
背景技术
本公开涉及用于无人驾驶运载工具(“UAV”)的不同壳体结构。UAV可以由可充电电池供电。当UAV不在使用中时,UAV可以被存放起来,并且可充电电池可以被充电。此外,UAV可能需要中继站以在较长飞行的中途充电,或者可能需要躲避恶劣天气。
发明内容
附图说明
参考以下附图描述了本发明的非限制性和非穷举性的实施方式,其中,除非另外指明,否则贯穿各个视图,相同的附图标记指代相同的部件。附图不一定按比例绘制,而是重点在于说明所描述的原理。
图1示出了根据本公开的一实施方式的具有伸缩式屋顶(roof)的壳体结构。
图2示出了根据本公开的一实施方式的具有可收缩(卷起)盖的壳体结构。
图3示出了根据本公开的一实施方式的具有向下折叠的屋顶的壳体结构。
图4A-4C示出了根据本公开的实施方式的模块化壳体结构。
图5A-E示出了根据本公开的一实施方式的模块化壳体结构。
图6A-1至图6A-4、图6B-1至图6B-4和图6C示出了根据本公开的实施方式的单个飞行器壳体结构的几个示例。
图7A和图7B示出了根据本公开的一实施方式的径向壳体结构。
图8示出了根据本公开的一实施方式的圆形壳体结构。
图9示出了根据本公开的一实施方式的“底部发牌的卡片叠(bottom dealingcard deck)”的壳体结构。
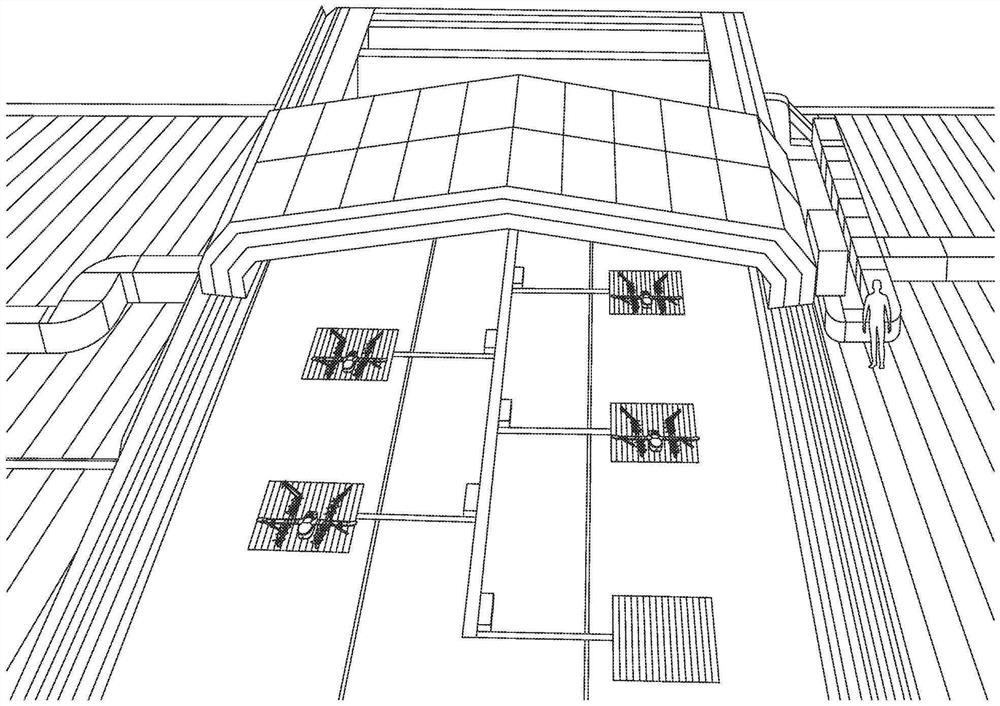
图10示出了根据本公开的一实施方式的连续降落、充电和起飞的壳体结构。
图11A和图11B示出了根据本公开的一实施方式的具有滑行槽和电池更换架(gantry)的壳体。
图12A-C示出了根据本公开的一实施方式的主轴壳体结构。
图13A和图13B示出了根据本公开的一实施方式的主轴壳体结构。
图14示出了根据本公开的一实施方式的降落和起飞平台。
图15A-D示出了根据本公开的一实施方式的具有可收缩充电台的模块化壳体结构。
图16A至图16C示出了根据本公开的一实施方式的在壳体结构中的旋转充电台。
图17示出了根据本公开的一实施方式的静态线充电站。
图18示出了根据本公开的一实施方式的基于仓库的自动飞行器“巢”。
图19示出了根据本公开的一实施方式的减风壳体和降落结构。
图20A和图20B示出了根据本公开的一实施方式的用于自动飞行器操纵和存放的系统。
图21示出了根据本公开的一实施方式的高密度线充电壳体。
图22A和图22B示出了根据本公开的一实施方式的具有滑出式起飞和降落支架的壳体。
图23A和图23B示出了根据本公开的一实施方式的具有转台的壳体结构。
图24A和图24B示出了根据本公开的一实施方式的具有手动电池更换的起飞和降落台。
图25示出了根据本公开的一实施方式的具有摆出式降落台的移动充电站。
图26A-26E示出了根据本公开的实施方式的移动充电站。
图27示出了根据本公开的一实施方式的具有手动电池更换和存放的壳体结构。
图28示出了根据本公开的一实施方式的具有部分自动的电池更换和存放的壳体结构。
图29A和图29B示出了根据本公开的一实施方式的用于手动电池更换和存放的滑出柜。
图30A-C示出了根据本公开的一实施方式的用于手动电池更换和存放的滑出柜的另一示例。
具体实施方式
在这里描述了用于自动飞行器壳体的装置、系统和方法的实施方式。在以下描述中,许多具体细节被阐述以提供对实施方式的透彻理解。然而,相关领域的技术人员将认识到,在这里描述的技术可以在没有特定细节中的一个或更多个的情况下执行,或者在其它方法、组件、材料等的情况下执行。在其它情况下,为了避免混淆某些方面,众所周知的结构、材料或操作没有被详细示出或描述。
在整个说明书中对“一个实施方式”或“一实施方式”的引用意指结合该实施方式描述的特定特征、结构或特性被包括在本发明的至少一个实施方式中。因此,在整个本说明书中在各处的短语“在一个实施方式中”或“在一实施方式中”的出现不一定都指的是同一实施方式。此外,在一个或更多个实施方式中,特定特征、结构或特性可以以任何合适的方式组合。
在这里描述了用于无人驾驶运载工具(“UAV”)的壳体的几个示例实施方式。UAV也可以被称为自动飞行器(“AA”)、自动遥控飞行器、无人机(drone)或自动飞机。
用于UAV的壳体的各个示例实施方式可以提供以下至少之一:UAV的充电功能、为UAV遮挡风雨的遮蔽物(shelter)、以及当UAV不在使用中时UAV的存放。壳体可以是无源的或有源的。有源壳体可以与UAV直接或间接地通信,并且可以移动壳体的组成部分以容纳UAV。在各种实施方式中,壳体是模块化的,以易于部署和存放可变数量的UAV。
图1示出了根据本公开的一实施方式的具有伸缩式屋顶的壳体结构。如图所示,伸缩式屋顶被分成多个段(segment),并且这些段沿着轨道滑动以覆盖自动飞行器降落和起飞台。如图所示,伸缩式屋顶的各段被成形为在其缩回时堆叠。像在这里描绘和描述的其它实施方式一样,降落台联接到电源(例如,参见所描绘的电力线上的块),以在UAV降落在台上时为UAV充电。充电可以是直接的(例如,使用所示的线性电极)或感应的。所描绘的屋顶段可以具有沿着轨道滑动以使壳体在降落台上方延伸的轮。在另一实施方式中,可以使用诸如电缆或链的其它结构以使屋顶段延伸到降落台上方。
在所描绘的实施方式中,基本上三角形的屋顶段可以覆盖有光伏电池以提供电力。所产生的电力可以被存储(例如在电池、电容器等中),然后经由电源电路系统被供应到自动飞行器以供应适当的电压/电流。
图2示出了根据本公开的一实施方式的具有可收缩(卷起)盖的壳体结构。所描绘的屋顶结构可以在降落台上方滑动,类似于自动泳池盖在泳池的表面上方延伸的方式:该盖可以沿着轨道滑动并使卷轴展开。这里,壳体盖可以由织物、聚合物或其它柔性材料制成。备选地或附加地,盖可以包括通过柔性/枢转段连接的刚性段(例如类似于可卷起的后箱盖罩(truck bed cover))。降落和起飞台可以设置在盖在其上延伸的容器(例如板条箱(crate)等)中。
图3示出了根据本公开的一实施方式的具有向下折叠的屋顶的壳体结构。如图所示,该结构包括三段,其中两个段向下折叠以露出起飞和降落台。如图所示,结构的近似长度可以是10m,具有起飞和降落台的部分的宽度可以是2.5m,封闭的壳体结构的高度可以是0.7m。将理解,该结构可以用电动机打开和关闭。电动机可以联接到控制器,并且控制器确定壳体结构何时需要被打开(例如,当来自UAV的信号指示即将起飞或降落时,例如,当UAV紧邻该结构时)。
图4A-4C示出了根据本公开的实施方式的模块化壳体结构。如所描绘的,图4A的模块化壳体结构400A包括多个壳体段401、端盖结构408、降落台403、一个或更多个进入点405以及航行辅助装置407a-d。各个壳体段401被成形为机械地接合在一起以形成模块化壳体结构400A的外部。在一些实施方式中,壳体段401可以包括用以使段401卡住或一起滑动的几何形状。备选地或附加地,紧固件(例如维可牢尼龙搭扣、拉链、磁铁、夹子、锁等)可以用于将壳体段401彼此接合和固定。如所描绘的,一个或更多个降落台403被定位在各个壳体段401内,并且降落台403被确定尺寸用于使自动飞行器降落在降落台403上。
降落台403可以被组织为具有在地板上均匀地间隔开的三个降落台403以及附接到高于地板的侧壁的两个降落台403。重新陈述,降落台403可以被组织到多个水平中,使得一些降落台403在其它降落台403的竖直上方。每个单独的壳体段401可以具有降落台403的相同布局或可以具有降落台403的不同布局。如果各个壳体段401具有相同的布局,则降落台403可以包括设置在进入通道下方的中心行的降落台403。进入通道向下延伸到壳体结构400A的内部。中心行的降落台403没有被其它降落台403覆盖。进入通道连接到进入点405,并延伸超过所有的降落台403。
所示的降落台403的布局仅是一个可能的实施方式,并且可以预期的是,其它布局和数量的降落台403可以被集成到每个壳体段401中。
一个或更多个进入点405被成形为允许所述一个或更多个UAV进入所述多个壳体段401中。例如,进入点405可以是壳体结构400A的一部分中的孔,该孔具有比UAV的翼展大的横向尺寸和比UAV的高度大的垂直尺寸。进入点405可以升高或靠近地面。在图4A的实施方式中,进入点405被集成到端盖结构408的侧壁中。在其它实施方式中(如关于图4B所示和讨论的),进入点405可以被集成到屋顶结构中。
各个壳体段401可以具有金属宽平端(poll)(例如钢、铝等)、塑料宽平端或其它宽平端的框架。壳体段401还可以包括在框架上形成壳体段401的面的金属(例如钢、铝等)或热塑性塑料板条(或其它类似材料)。重新陈述,壳体段401可以具有金属或塑料框架,并且金属或塑料板条覆盖该框架。备选地,各个壳体段401可以包括金属或塑料框架,帆布或类似材料在该框架上面。作为另一备选,各个壳体段401可以由金属或热塑性塑料板条形成,其中诸如锁定铰链的连接件连接该板条。
各个壳体段401可以具有在组装以形成模块化壳体结构400A时重复的共同的结构形状。壳体段401中的第一个和最后一个可以包括端帽结构408,其被成形以封闭模块化壳体结构400A的外部的端部。端盖结构408可以由与壳体段401相同的材料制成。端盖结构408可以包括或限定进入点405。
如图所示,壳体结构400A包括被成形为机械地接合到所述多个壳体段401的端盖结构408,并且当所述多个壳体段401被接合时,端盖结构408包围壳体结构400A的端部。在所描绘的实施方式中,所述一个或更多个进入点405位于端盖结构408上,使得UAV“飞过”壳体结构400A以到达其降落台403。尽管进入点405被称为“进入点”,但是将理解,进入点也可以用作出口点。
如图所示,壳体结构400A可以包括几个航行辅助装置407a-d。航行辅助装置407a-d可以包括闪光灯、RFID装置、红外信标、声音发射装置、蓝牙信标、基准标记等。基准标记是用作参照物和信息的光学点的物体。基准标记可以采取标记或一组标记的形式,诸如条形码或快速响应(“QR”)代码。
航行辅助装置407a-d被显示在壳体结构400A上或由壳体结构400A显示。第一航行辅助装置407a可以被靠近所述一个或更多个进入点405定位,以将UAV引导到所述多个壳体段401(或壳体结构400A的内部)中。可以在壳体结构400A的内部中在进入点405周围放置类似的航行辅助装置,以将UAV引导出壳体结构400A。第一航行辅助装置407a可以与进入位置、进入壳体结构400A的方向或一些其它航行信息或识别信息相关联,并因此指示进入位置、进入壳体结构400A的方向或一些其它航行信息或识别信息。类似地,第二航行辅助装置407b可以被放置在所述一个或更多个降落台403上或周围,以将UAV引导到所述一个或更多个降落台403上。第二航行辅助装置407b可以指示降落台编号、在降落台403上降落的方向或其它航行或识别信息。第二航行辅助装置407b可以小于第一航行辅助装置407a。
另外,第三航行辅助装置407c可以被放置在壳体结构400A的外部或壳体结构400A的旁边。第三航行辅助装置407c可以指示壳体结构400A的标识、进场路径、进入位置、壳体布局或其它标识或航行信息。航行辅助装置407a-c还可以参考存储在UAV连接到的网络中的信息或存储在UAV上的信息。例如,第三航行辅助装置407c可以是基准标记,其包括用于查找壳体结构400A的航行信息或布局信息的代码。与第一航行辅助装置407a相比,第三航行辅助装置407c可以更大、更亮或者以别的方式可由UAV从更大的距离检测到。
在一些实施方式中,可以存在室内航行辅助装置407d以将UAV引导到它们各自的降落台403。例如,室内航行辅助装置407d可以是基准标记,其指示从所述多个壳体段中识别壳体段401或壳体段401的相对物理位置以辅助航行到壳体结构400A内的给定降落台403。UAV可以被编程以使用室内航行辅助装置407d在壳体段401之一中找到分配的降落台403。
重新陈述,壳体结构400A可以包括多个航行辅助装置407a-c和航行辅助装置407d,它们辅助UAV航行进入壳体结构400A并到降落台403,并且还辅助UAV从降落台403航行离开壳体结构400A。
第三航行辅助装置407c被设计成能被UAV从很远的距离检测到,以协助UAV定位壳体结构400A。第一航行辅助装置407a被设计成在UAV已经定位了壳体结构400A之后协助UAV定位进入点405和航行通过进入点405。因此,第一航行辅助装置407a被设计成能被近距离处的UAV检测到,并且可以提供比第三航行辅助装置407c更精确的航行信息。因此,第一航行辅助装置407a可以小于第三航行辅助装置407c。
第二航行辅助装置407b被设计成将UAV引导到壳体结构400A的内部内的降落台403上。因此,第二航行辅助装置407b被设计成能被近距离的UAV检测到并提供精确的航行信息。因此,与第一航行辅助装置407a相比,第二航行辅助装置407b可以更小或以别的方式可由UAV从更小的距离检测到。
室内航行辅助装置407d被设计成向壳体结构400A内部的UAV提供大概的航行信息。因此,室内航行辅助装置407d被设计成能被近距离的UAV检测到。如果航行辅助装置407a-d是基准标记,则室内航行辅助装置407d可以大于第二航行辅助装置407b并且小于第三航行辅助装置407c。因此,航行辅助装置407a-d为UAV提供基于视觉的综合航行系统。
降落台403可以包括被定位(例如集成到降落台403中)以当所述一个或更多个自动飞行器在降落台403上时向所述一个或更多个UAV供应电荷的充电电路系统409。将理解,充电电路系统409可以包括:电触点,设置在所述一个或更多个降落台403上,并定位成与所述一个或更多个UAV上的电极接触;感应充电电路系统409,设置在所述一个或更多个降落台403上,并定位成将电荷感应地传送到所述一个或更多个UAV;以及根据本公开的教导的用于提供电荷的其它技术。
图4B描绘了模块化壳体结构400B,其具有与模块化壳体结构400A相似的特征。然而,在所描绘的示例中,一个或更多个进入点406被靠近各个壳体段402的顶部定位。因此,每个壳体段402可以包括单独的进入点406,以允许UAV进入模块化壳体结构400B中或从模块化壳体结构400B出来。因此,UAV可以飞过壳体段402的“屋顶”,并由设置在屋顶上的第一航行辅助装置407a引导。壳体段402的屋顶上的进入点406可以是各个壳体段的屋顶中的开放间隙。各个壳体段的屋顶中的各个进入点406可以接合在一起以形成一个或更多个较大的进入点(例如较大的带状开口)。
如图4B所示,壳体结构400B的壳体段402可以具有比壳体结构400A的壳体段401少一个的降落台403(例如,壳体结构400A的壳体段401具有在地板上均匀隔开的三个降落台403,以及附接到高于地板的侧壁上的两个降落台403,而壳体结构400B的壳体段402缺少在地板上的中间降落台403,其可以因此导致降落台403不会变湿或不会接受阳光直射,因为壳体结构400B的屋顶是部分敞开的)。实施方式不限于降落台403的这些公开的构造,降落台403的任何构造都可以用于壳体结构400A或400B中。
壳体结构400A和400B可以是无源壳体结构。因此,壳体结构400A和400B可以不具有任何通信元件或主动控制的移动部件。如果壳体结构400A和400B是无源的,则UAV可以经由无线网络(诸如蜂窝网络)与控制服务器通信,以便知道在哪个降落台403上降落以及何时起飞。
备选地,壳体结构400A和400B可以是具有集成的本地通信控制器(类似于下面讨论的其它通信控制器)的有源结构。通信控制器可以与UAV通信以管理哪些UAV降落在哪个降落台403上。通信控制器还可以主动管理哪些降落台403接收电力以对UAV进行充电。壳体结构400A和400B还可以包括具有门的有源进入点405。门可以基于UAV和/或控制服务器请求门打开的信息而打开和关闭以允许UAV进入或离开壳体结构400A或400B。
壳体结构400A和400B是模块化的,这意味着可以通过在端盖结构408之间连接更多的壳体部分401或402来改变壳体结构的尺寸。类似地,通过在端盖结构408之间连接更多或更少的壳体部分401,壳体结构400A和400B可以支撑的UAV的数量是可扩展的,从而改变壳体结构400A或400B中的降落台403的数量。
图4C示出了处于折叠的、基本上平坦的构造的壳体端401(或402)。在一些示例实施方式中,各个壳体段401或402可折叠成基本平坦的构造。在基本平坦的构造中,壳体段401可以堆叠以便于运输。壳体段401或402可竖立为图4A和图4B中示出的形式之一,并连接以形成壳体结构400A或400B。
壳体段401(或402)的框架可以包括接头,其允许壳体段401折叠成基本平坦的构造。备选地,如果壳体结构400A或400B不具有框架,则板条之间的连接器可以允许壳体段401折叠成基本平坦的构造。重新陈述,壳体段401可折叠成基本平坦的构造,而无需拆卸壳体段401。在一些示例实施方式中,在壳体段401可以被折叠成基本平坦的构造之前,可能必须重新定位或调节降落台403。
图5示出了根据本公开的一实施方式的模块化壳体结构。图5描绘了可以与在这里公开的任何结构一起使用的8'×40'模块。这为8'×40'基底结构提供了被预先内置在具有内部布线的独立单元中的五个以上的焊盘、充电器、布线、IT和可选的通风装置。可以添加各种可伸缩的顶部,或者可以将模块构建为更大的模块化结构,类似于图4A和图4B中提出的“模块化中飞行”结构。由于所描绘的模块相对平坦,所以模块可以在标准容器或拖车床上堆叠~10层高,以进行移动部署。
图6A-6C示出了根据本公开的一实施方式的单个飞行器壳体结构的几个示例。如图6A-1所示,第一实施方式601示出了折叠式敞开屋顶结构以装入UAV,并且UAV在底座上升高。屋顶略微弯曲,因此水可以流走。底座可以包括如在这里其它地方讨论的降落台。如图6A-2所示,第二壳体结构实施方式603具有类似的弯曲屋顶结构,但是屋顶可以被拉下,或者屋顶的侧面可以折叠在基座下面以打开屋顶的顶部。
如图6A-3所示,所描绘的壳体结构的第三实施方式605显示了可伸缩的折叠式(折纸状,类似于手风琴)屋顶结构。屋顶由波纹状的片状材料(例如塑料等)制成,该波纹状的片状材料在缩回时折叠到小的空间。该壳体结构可以是有利的,因为屋顶结构可以由廉价的材料制成并且是半变形的。屋顶可以手动或自动折回(例如,屋顶在使屋顶缩回的一个或多个轨道上)。该单个UAV壳体结构可以具有相对小的占地面积(例如4'×4',其仅略大于单个UAV的横向尺寸)。如图6A-4所示,壳体结构可以包括具有充电电路系统和专用电源(例如一个或更多个电池、电容器等)的升降台。
图6A-4中描绘的单个UAV壳体结构的第四实施方式607示出了塑料圆顶,该塑料圆顶经由一侧的铰链向下折叠在UAV上。圆顶可以手动或通过电动机打开或关闭。圆顶可以具有弹簧加载的辅助件,以减轻电动机上的压力。将理解,该实施方式传达了存储优点,例如,圆顶部件可以与降落台分离并被堆叠。此外,圆顶可以由透明聚合物或玻璃制成,以使操作员看到哪些结构包含UAV以及哪些是空的。
图6B示出了单个UAV壳体结构的几个其它实施方式。图6B-1中的第一实施方式609示出了一种壳体结构,其中,降落台从盒子滑出,类似于鞋盒可以如何打开。将理解,盖或降落台都可以移动。这可以通过将盖或降落台放在轨道上来实现。在所描绘的实施方式中,闭合的壳体结构可以是基本上矩形的形状(例如,4'×8'的平面盒)。
图6B-2中的第二实施方式611示出了与图2的壳体结构相似的单个UAV壳体结构,其中滚动盖被用于覆盖UAV。在所描绘的实施方式中,侧面可以是硬的,而盖是软的(以允许滚动),或者如上面结合图2所述的,盖可以是与柔性段链接在一起的硬段,类似于硬顶滚动式后箱盖罩(truck bed cover)。在其它实施方式中,侧面也可以是软的。盖的滚动可以是手动或自动的(例如,电动机联接到卷轴以卷起和展开盖)。盖的展开可以用张力线引导,并且盖可以沿着轨道滑动。如所描绘的,壳体结构可以是4'×5'。
图6B-3中描绘的第三实施方式613示出了第二折纸型壳体结构。与第一折纸样式的壳体结构不同,这里描绘的壳体结构没有矩形的屋顶基底(实施方式613的屋顶基底基本上是椭圆形的)。折叠式屋顶结构还沿垂直于降落的UAV的长度的方向折叠(而在另一折叠实施方式中,屋顶相对于降落的UAV沿纵向折叠)。
图6B-4中的第四实施方式615示出了“荷花”灵感的壳体结构,其中四个透明的(或者在一些实施方式中是不透明的)屋顶段从圆顶形状打开以露出在内部的UAV。屋顶结构可以是由塑料等制成的硬壳。该结构展开时会具有大的占用面积(例如7'×7')。
图6C示出了UAV壳体结构的另外的实施方式617。所描绘的壳体结构类似于图6A-4的实施方式607;然而,这里描绘的壳体结构与UAV的形状一致。因此,由于壳体的顶部遵循设置在其中的UAV的轮廓,因此其占据尽可能小的空间。
图7A和图7B示出了根据本公开的一实施方式的径向壳体结构。在所描绘的示例中,基本圆形的径向盖被定位为覆盖所有的降落台,并由薄金属框架支撑。所述盖可以是软顶或硬顶。在一些实施方式中,壳体结构可以像帐篷一样展开和组装以覆盖所有的降落台。所述盖可以打开以同时暴露所有的降落台。备选地,所述盖的仅一部分可以打开,并且UAV可以通过在壳体结构内使用基准或信号而通过该小开口飞入它们各自的台。在一些实施方式中,降落台可以设置在旋转平台上,在该旋转平台上将要起飞的UAV的位置或UAV将要降落到其上的位置被旋转到暴露位置。旋转平台可以由电动机、控制器和通信逻辑(例如无线电WiFi等)控制,以与进入和离开的UAV以及一个或更多个控制站进行通信。
图8示出了根据本公开的一实施方式的圆形壳体结构。图8类似于图7,其中采用了具有可能的旋转内部件的圆形壳体结构。然而,在所描绘的示例中,UAV可以降落,然后可以采用降落台的传送带或传送轨道以将UAV移动到壳体结构中(逆时针移动)。当UAV计划起飞时,传送带将UAV移至起飞位置。在UAV起飞后,空的充电台逆时针移动到降落位置,以接收UAV。
图9示出了根据本公开的一实施方式的“底部发牌的卡片叠”的壳体结构。在所描绘的实施方式中,类似于从卡片叠的底部发牌,从壳体结构的底部部署降落台。如图所示,降落台可以在轨道等上被连接并滑出壳体结构的底部。这种结构的一个优点是,可能需要单个致动器来经由电缆部署和拉回飞行器。另一优点是壳体结构可以具有非常小的占用面积(例如5'×5')。
图10示出了根据本公开的一实施方式的连续降落、充电和起飞的壳体结构。在所描绘的实施方式中,UAV可以降落在降落台上(左),降落台从壳体结构向外伸出。于是,飞行器可以接合槽/轨道,在该槽/轨道中,飞行器沿着轨道被携带(或以其自身的动力行进)到充电位置和/或包裹装载位置。在一些实施方式中,当飞行器接合轨道时,飞行器通过轨道中的电源轨接收电荷。
尽管所描绘的实施方式示出了单层壳体结构,但是其它实施方式可以具有多层。而且,屋顶可以包括光伏电池,以利用电源轨或其它充电机构向飞行器提供至少一些电力。在一些实施方式中,所描绘的壳体结构可以被安装在运载工具(vehicle)上。
图11A和图11B示出了根据本公开的一实施方式的具有滑行槽和电池更换架的壳体。图11A中描绘的实施方式与图10中描绘的实施方式相似;然而,图11A中描绘的实施方式具有UAV可以降落、经由所述架更换电池、并且UAV拾取包裹的多个层。图11B描绘了图11A中描绘的实施方式的一个层。在所描绘的实施方式中,UAV降落在页面左手侧的梯田形降落台上,并从页面右手侧的梯田形起飞点起飞。如图所示,在起飞点和降落点之间,UAV可以驻留在充电站上,或者可以从所描绘的电池行中更换电池,等等。如在其它实施方式中一样,可以将UAV引导到降落台,或者可以用视觉、电子或磁性辅助装置(例如UAV磁性地夹在轨道上)来标记降落台。
图12A-C示出了根据本公开的一实施方式的主轴壳体。如图12A所示,UAV可以降落在篮圈(hoop)或其它类型的降落台(例如,在其它地方描绘的正方形降落台)上。一旦UAV已经降落,臂可以向下延伸以保持并调整UAV的位置。在图12B和图12C中所描绘的示例中,有多层的降落台,并且每层的台以及单独的台本身可以能够单独地旋转。如所描绘的,UAV可以能够以几乎任何方向降落在篮圈中,并且与每个篮圈相关联的臂可以在降落后调整UAV的方向。在一些实施方式中,台可以能够在主轴上上下(垂直)移动。
图13A和图13B示出了根据本公开的一实施方式的主轴壳体结构。类似于图12A的壳体结构,图13A的壳体结构示出了具有多个UAV降落台的主轴。如所描绘的,UAV可以降落在支架上的台上,中空的U形基座可以将UAV保持在适当位置。可以使用束带等将UAV保持在适当位置。电极或感应充电可以用于为UAV上的所述一个或更多个电池充电。
一旦UAV降落,台就可以摆动到主轴的另一侧,以使UAV远离降落区。操作者(例如人或机械臂)可以将包裹(包括磁性带)附接到UAV的下侧。如图13B所示,由于所述带和UAV之间的磁力,包裹可以通过所述带被保持在UAV上。例如,UAV内或上可以有电磁线圈,它们与所述带相互作用以将包裹保持在适当位置。将包裹附接到UAV之后,降落台可以被升高并旋转到发射位置以进行包裹送达。
图14示出了根据本公开的一实施方式的降落和起飞平台。在所描绘的示例中,降落台位于主轴的顶部(例如,以避免使UAV撞到地面上的人和物)。一旦UAV降落在降落台上,降落台就沿主轴向下延伸,然后旋转到充电和包裹拾取站。充电站可以为UAV快速充电,或者在包裹附接到UAV下侧时更换电池。一旦UAV接收到包裹并且被充分充电(例如,高于完成送达的阈值电荷),则UAV可以从充电位置起飞。然后可以使空的充电台返回到主轴的顶部,以接收另一UAV。在一些实施方式中,每个主轴可以有多个充电台,并且随着降落/充电台在主轴上下降,它们将电荷输送到UAV。
图15A-D示出了根据本公开的一实施方式的具有可伸缩充电台的模块化壳体结构1500。
图15A示出了根据本公开的一实施方式的模块化壳体结构1500。图15A描绘了多个模块化壳体部分1505,其在顶部堆叠有封盖结构1510以形成模块化壳体结构1500,其可以与在这里公开的任何结构一起使用。模块化壳体结构1500还可以包括第三航行辅助装置407c。每个堆叠的模块化壳体部分1505可以包括具有充电电路系统409和第二航行辅助装置407b的降落台403。降落台403还可以包括气流开口1520。在一些示例实施方式中,模块化壳体结构1500包括基底结构1570。
模块化壳体部分1505是可堆叠的,使得模块化壳体结构1500基于一次彼此垂直堆叠的模块化壳体部分1505的数量而支持可扩展数量的UAV。重新陈述,模块化壳体部分1505可彼此堆叠以形成模块化壳体结构1500。可以堆叠任何数量的模块化壳体部分1505。
降落台403可以被机械地驱使以从给定的模块化壳体部分1505的内部延伸,以接收和部署UAV并且撤回或缩回到内部以遮挡UAV而使其不受天气影响。单独的模块化壳体部分1505可以具有门1508,该门1508在机械地驱使降落台从模块化壳体部分1505的内部伸出时打开,并且在机械地驱使降落台撤回到模块化壳体部分1505的内部时关闭。备选地,门1508可以被附接到降落台403,使得当降落台403被机械地驱使时,门与降落台403一起移动。当降落台403从模块化壳体部分1505的内部伸出时,门1508可以向下折叠,或者可以保持直立。
可以通过电动机(未示出)驱使降落台403。每个模块化壳体部分1505可以具有电动机。备选地,模块化壳体结构1500可以具有电动机,该电动机具有连接至每个模块化壳体部分1505的机械能传递机构(诸如链、齿轮、驱动杆等)。
降落台403可以从模块化壳体结构1500沿任何方向延伸。模块化壳体部分1505的第一部分可以驱使降落台403离开模块化壳体结构1500的第一侧,而模块化壳体部分1505的第二部分可以驱使降落台403离开模块化壳体结构1500的与第一侧不同的第二侧。
在一些位置,诸如在敞开的屋顶上,使降落台403从模块化壳体结构1500沿所有方向延伸以增加可以在任何给定时间从不同的接近角进入和离开模块化壳体结构1500的UAV的数量可能是有用的。在其它环境中,诸如靠近墙壁或其它障碍物,使降落台403仅在一个或两个方向上延伸以避开障碍物或更有效地利用有限的空间可能是有利的。
当降落台403在模块化壳体部分1505的内部时,模块化壳体部分1505的外部与门一起可以包围在降落台403上的UAV,以保护UAV不受天气影响或不被盗。重新陈述,当降落台403在模块化壳体部分1505的内部时,模块化壳体结构1500可以包围并保护降落台403和在降落台403上的UAV。
降落台403中的气流开口1520可以以几种形式出现。例如,降落台403可以包括在格栅或网状材料之间限定气流开口1520的格栅或网状物部分。备选地,气流开口1520可以是降落台403中的孔。作为另一备选,气流开口1520可以是降落台403与模块化壳体部分1505的侧壁结构之间的间隙或管道。
所描绘的实施方式是充电台可以从轨道上的结构的侧面滑出的情况。为了安全存储,UAV被拉入壳体结构1500中。响应于来自UAV或控制服务器请求的UAV降落或离开,降落台403可以滑出模块化壳体结构1505。如下所述,与UAV通信并延伸和缩回台的电子设备可以被封装在模块化壳体结构1500中。
基底结构1570可以包围模块化壳体部分1505的最下部的底侧。基底结构1570可以用作模块化壳体结构1500的稳定平台。基底结构还可以起到防止水分进入和防止受环境气氛控制的空气离开模块化壳体结构1500的作用。
图15B示出了类似于图15A的模块化壳体结构1500的模块化壳体结构1501,除了模块化壳体结构1501在每个模块化壳体部分1505中具有并排的两个降落台403之外。在图15B的模块化壳体结构中,降落台403以2x1模式布置。但是,其它模式也是可能的,诸如2x2或3x1。
当在模块化壳体部分1505的内部中时并排的降落台403可以被连接,使得降落台403被一起机械地驱使。在其它实施方式中,并排的降落台403可以分离,使得降落台403被单独地机械地驱使。此外,当在模块化壳体部分1505的内部中时并排的降落台403可以在彼此不同的方向上被机械地驱使,使得降落台403在它们从模块化壳体部分1505的内部伸出时不并排。重新陈述,每个模块化壳体部分1505可以包括多个降落台403,其可以连接或可以不连接并且可以被一起机械地驱动或可以不被一起机械地驱使。
图15C示出了与图15B的模块化壳体结构1501类似的模块化壳体结构1502。在图15C中,并排的降落台403在轨道1580上,该轨道1580在垂直于降落台403并排的方向上延伸。并排的降落台403被连接以使得降落台403在与降落台403并排的方向垂直的方向上被一起机械地驱使。
图15D示出了模块化壳体结构1503的内部以及模块化壳体结构1503内的气流。模块化壳体结构1503代表模块化壳体结构1500、1501或1502的一种可能的内部实现方式。模块化壳体结构1503在封盖结构1510中包括环境气氛控制器1550、通信控制器1560以及可选地包括电池1530。这些元件可以备选地被放置在基底结构1570中。可以通过与外部电源(诸如电网、发电机或其它电源)的连接来代替电池。模块化壳体结构1503的内部还可以包括限定气流开口1520的降落台403。
环境气氛控制器1550可以包括加热器、风扇、空调单元或除湿器中的至少之一。环境气氛控制器1550可以使用加热器和空调单元控制空气温度。环境气氛控制器1550可以使用除湿器控制模块化壳体结构1503内的湿度。风扇可以通过在模块化壳体结构内使空气循环来辅助加热器、空调单元和除湿器控制整个模块化壳体结构1503中的环境气氛。因此,环境气氛控制器1550可以通过防止UAV具有过热、结冰或其它与环境气氛有关的问题而使UAV保持可操作。气流开口1520允许环境气氛控制器1550通过允许空气从环境气氛控制器1550流到每个模块化壳体部分1505而更容易地控制模块化壳体结构1500内部的环境气氛。
模块化壳体结构1503的结构还可以遮挡UAV以使其免受风、雨、雪等的影响,并在模块化壳体结构1503内保持环境气氛受控。以这种方式,模块化壳体结构1503可以将UAV遮挡在模块化壳体结构1503的内部中以使其不受天气影响,并有效地控制模块化壳体结构1503中的环境气氛。
图15A-D的模块化壳体结构是可以直接或间接地与UAV通信的有源壳体结构。例如,壳体结构可以使用Wi-Fi或其他无线局域网(“WLAN”)与UAV通信,以促进UAV在模块化壳体结构中的降落和存放。作为另一示例,模块化壳体结构可以经由控制服务器在UAV连接到的无线网络上进行通信。重新陈述,UAV或控制服务器可以与模块化壳体结构通信(直接地或间接地),以便请求降落台403的机械致动,从而促进UAV降落或起飞。
通信控制器1560可以与UAV通信并且控制模块化壳体结构1503的操作。通信控制器1560可以直接或间接地与UAV通信。通信控制器1560可以基于其与UAV的通信进行操作,或者可以基于来自控制服务器的命令进行操作。例如,通信控制器1560可以与UAV通信以确定UAV请求被存储在模块化壳体结构1503中。
通信控制器1560可以将UAV分配给降落台403之一,然后使所分配的降落台403被机械地驱使到模块化壳体结构1503的外部。一旦通信控制器1560感测到UAV已经降落在降落台403上(诸如通过感测充电已经开始或通过检测到的降落台的重量变化),则通信控制器1560然后可以使降落台403被机械地驱使到模块化壳体结构1503的内部。备选地,通信控制器1560可以基于来自UAV的UAV已经降落的信息将降落台机械地驱使到模块化壳体结构1503的内部。作为另一个示例,通信控制器1560可以从通信服务器接收指示存放在模块化壳体结构1503中的UAV将要起飞的信息,并且通信控制器1560可以使相关联的降落台403被机械地驱使到模块化壳体结构1503的外部以使得UAV可以起飞。
通信控制器1560可以控制电动机以便机械地驱使降落台403。通信控制器1560还可以基于感测到的UAV的温度、来自UAV的指示UAV的温度的信息、或者接收到的天气信息来控制环境气氛控制器1550以控制模块化壳体结构1500中的环境气氛从而冷却或加热UAV。例如,通信控制器1560可以从控制服务器接收天气低于冰冻和降雪的天气信息,并且基于该天气信息,控制环境气氛控制器1550对最近到达的UAV进行除冰。
光伏装置可以设置在结构的顶部上,以对包含在其中的UAV进行充电。另外,电池1530可以存储来自光伏装置的电力。通信控制器1560可以包括用于经由Wi-Fi、无线电、RFID、蓝牙等进行通信的通信电子设备。
图16A至图16C示出了根据本公开的一实施方式的在壳体结构中的旋转充电台。图16A示出了大的矩形容器1601,其具有设置在其内的多个降落台1603,降落台1603被确定尺寸且以一定间隔排列以容纳UAV。如图所示,矩形容器1601在顶部具有开口1605,UAV可以从该开口降落和起飞。如图所示,轨道1621至少部分地设置在容器1601的内部。电动机1623被机械地联接以沿着轨道1621将一个或更多个降落台1603从容器1601内部移动到起飞和降落位置(顶部),其中所述一个或更多个UAV从起飞和降落位置降落在所述一个或多个降落台1603上。
在所描绘的示例中,一个或更多个降落台1603被配置为机械地联接到轨道1621,以沿着轨道移动一个或更多个降落台1603。如图所示,降落台1603可以包括扣环,以抓住电缆或链条(例如拖缆)。电动机1623可以机械地联接以移动拖缆。
图16B描绘了壳体结构的另一实施方式。图16B中的壳体结构具有许多与图16A中的壳体结构相同的部件。然而,图16B中的结构包括设置在容器1601内的旁路结构1625,其中旁路结构1625沿着轨道1621定位,以在所述一个或更多个降落台1603沿着轨道1621移动时防止所述多个降落台1603中的各个降落台1603移动到起飞和降落位置(顶部)。换句话说,旁路结构可以重定向台以免使其到起飞和降落位置。这样,当UAV降落时,上面有UAV的台不会移动到起飞位置。此外,当UAV需要起飞时,上面没有UAV的台不会移动到起飞位置。旁路系统可以将降落台按某路线发送到辅助轨道(类似于火车)上。因此,轨道1621是至少部分地设置在容器1601的内部内的多个轨道之一。在一些实施方式中,降落台可以夹在另一电缆上以被拉到辅助轨道上。该功能可以由控制器(例如控制器1631)控制,当UAV需要降落/起飞时,该控制器由其它组件通知。换句话说,控制器包括逻辑,该逻辑在由控制器执行时使控制器执行包括确定所述多个降落场1603中的各个降落场1603是否被所述一个或更多个自动飞行器占用的操作。然后,基于确定各个降落台1603是否被占用,控制器可以使用旁路结构1625来防止各个降落台移动到起飞和降落位置。
图16C示出了壳体结构的内部,像其它实施方式一样,各个降落台1603被联接以通过电动机1623在轨道1621上移动。电动机1623联接到控制器1631、通信系统1633(例如,以从互联网、无线电信号源等接收有线或无线通信)和电源1635。
控制器1631还电联接到恒温器/温度计1627。恒温器1627被定位成测量容器1601的内部的温度。加热系统1641(例如热电加热器、电阻加热器等)电联接到控制器1631,并被定位成将热供应到容器1601的内部。冷却系统1643(例如热电冷却器)电联接到控制器1631并被安置为从容器1601的内部去除热量。响应于恒温器1627测量到大于第一阈值温度(例如>40℃)的第一温度,恒温器1627激活冷却系统1643,并且响应于恒温器1627测量到小于第二阈值温度(例如<5℃)的第二温度,恒温器1627激活加热系统1641。这可能会阻止UAV电子设备过热/冷却。
图17示出了根据本公开的一实施方式的静电线充电站。在所描绘的示例中,一个或更多个UAV可以降落或被放置于在壳体结构的主体内的立柱之间串起的带电导线上。在所描绘的示例中,UAV具有导电钩以接合导线(以给电池充电)并将UAV保持在适当位置。壳体结构的屋顶可以是由织物、塑料等制成的可伸缩遮篷。可以通过24V DC电源对电线上的UAV进行充电。在所描绘的实施方式中,1-4架飞行器可以悬挂在8'壳体结构中的电线上。另外,可以提供单个115V AC插座,用于充电、遮篷扩展/收回、红外导航以及与UAV通信。
图18示出了根据本公开的一实施方式的基于仓库的无人驾驶运载工具(UAV)“巢”。如所描绘的,基于仓库的壳体结构可以具有飞入式UAV功能(例如,通过建筑物中的开口等)。结合在这里公开的其它实施方式描述的引导系统可以用于使UAV航行到建筑物中。进入之后,UAV可以被放置在轨道或传送带上,在轨道或传送带上一些UAV被转移到存放、充电站或维护中,而其它UAV(如果它们仍然有足够的电荷来完成送达)则被重新确定路线到包裹拾取。
在所描绘的实施方式中,仓库分为三个部分,第一部分用于UAV降落,第二部分用于UAV包裹装卸,第三部分用于包裹准备(例如,如果包裹含有食物,则准备食物)。所准备的包裹可以被放在传送带或轨道上,并移动到UAV装/卸区。在UAV被装载之后,它可以通过壳体结构中的一个或更多个孔离开。该结构中的所述一个或更多个孔/窗可以具有随UAV离开或降落而自动打开/关闭的门。
将理解,壳体结构可以包括先进的计算机系统(例如处理器、存储器、电源等),以控制流入和流出仓库的大量UAV。例如,计算机可以与进入的UAV进行通信以确定电池的电量,并基于电量为UAV分配任务。传送系统可以类似地由与电动机等联接的一个或更多个计算机系统控制。
图19示出了根据本公开的一实施方式的减风壳体结构。在所描绘的示例中,壳体结构屋顶是基本上为四分之一球形的壳。壳具有至少部分地设置在结构的屋顶下方的降落台。结构的屋顶旋转(无源地或在受控的机动下旋转)以阻挡UAV不受风的影响。这样,UAV不会在降落台上时被吹走。这里,降落台可以是设置在建筑物等的顶部等上的中间降落台。这样,如果任务终点非常远(超出UAV的最大范围),则UAV可以在完成任务的中点或返回途中停止以充电。
备选地或附加地,代替在四分之一球形屋顶结构的遮挡物中具有降落台,遮挡物下面的区域可以是进入壳体结构(例如这里描述的建筑物)的进入点。因此,当UAV接近建筑物时,由于遮挡物遮挡了UAV,所以当UAV试图进入壳体结构时,它不会由于风而撞入建筑物的侧面等。
图20A和图20B示出了根据本公开的实施方式的用于自动飞行器操纵和存放的系统。图20A示出了UAV可以降落在矩形台上。然后,可以使用机械臂拾取UAV以将它们置入高密度充电状态和/或存放它们。类似地,当UAV准备好完成任务时,可以使用机械臂将UAV从存放支架放在降落台上。在机械臂从UAV上脱离之后,UAV可以起飞并完成其任务。机械臂可以联接到计算机系统,并根据UAV的起飞和降落模式移动它们的位置。例如,进入的UAV可以与控制机械臂的计算机系统进行通信,以通知手臂移开进入的UAV的路径,或者因为请求了任务而将UAV从其存放支架中取出。
图20B还示出了根据本公开的一实施方式的用于UAV操纵和存放的系统2000。系统2000的所示实施方式包括存放主体2050、存放支架2030、在轨道2015上的机械臂2010、具有降落台2020的表面2040以及控制器2018。
机械臂2010由控制器2018控制。控制器2018可以是计算机、CPU、处理器或其它控制电路系统。控制器2018控制机械臂2010以将UAV从降落台2020移动到存放支架2030,并且从存放支架2030移动到降落台2020。
存放主体2050可以是大约存放容器的大小并且能够被装载在半卡车拖车上的有框盒子,或者可以被安装到运载工具上。表面2040可以是能够向上折叠到存放主体2050的敞开侧上用于运输的板条。
在一些实施方式中,在表面2040上有分开的降落区和起飞区,类似地,有分开的用于降落和起飞的降落台2020。在一些示例实施方式中,机械臂2010可以是固定的或沿着轨道2015移动。在所描绘的示例中,机械臂2010附接到存放主体2050,并且臂可以沿着机械臂的竖直梁竖直地穿过并且还可以在轨道2015上水平地穿过以在x/y平面中移动。该运动功能允许臂将UAV放置在存放主体2050中的其指定的存放区域/从存放主体2050中的其指定的存放区域移走。尽管未示出,但是系统2000可以包括与上述航行辅助装置相似的航行辅助装置407a-c,以将UAV引导至降落台2020。
存放支架2030可以包括充电电路系统409(这里未示出)和用于固定UAV用于在被存放在存放支架2030中的同时进行运输的安装件。
图21示出了根据本公开的一实施方式的高密度电线充电壳体。在所描绘的示例中,UAV降落在电缆上,并被推到壳体结构内的可用吊架上。UAV像衣服在衣架上一样被悬挂。在所描绘的实施方式60中,可以管理飞行器的到达和离开。飞行器可以在壳体结构内沿着与干洗店的衣架类似的轨道移动。在所描绘的实施方式中,UAV将其电池放入两个充电转盘(carousel)之一。对充电转盘进行索引,并已充电的电池被上载到将要离开的飞行器中。将要离开的UAV进入壳体结构内的一位置,在该处它们被推下吊架并进入起飞区。在准备就绪时,UAV滑出导轨并且包裹被上载。
图22A和图22B示出了根据本公开的一实施方式的具有滑出式起飞和降落支架的壳体。在一个实施方式中,各个支架独立地滑出(例如,容纳飞行器的每个支架单独地滑入和滑出)。将理解,支架可以具有UAV充电功能。它们的滑动可以手动发生(例如,当操作员想要进入UAV时)和/或自动发生(例如,当UAV需要起飞或降落时)。在一些实施方式中,所有的支架可以一次滑出以暴露所有的飞行器。当所有的支架滑出时,壳体结构可以是梯形的(例如,类似于看台座椅),因此所有的UAV可以一次起飞或降落(例如,在大容量情况下)。
图23A和图23B示出了根据本公开的一实施方式的具有转台和架的壳体结构。在所描绘的实施方式中,UAV可以降落在壳体结构的顶部上。由于降落条件(例如,风将UAV吹离航线),UAV可以处于任何方向。转台可以联接到逻辑以将飞行器转至一位置,因此其可以由联接到壳体结构的机械臂/架拾取,并且机械臂将UAV置于适当的槽中以进行充电和/或存放。类似地,当UAV需要起飞时,可以向臂发送指令以提起飞行器和电池包,并将其放在壳体结构的顶部上的转盘上的起飞位置。臂可以联接到任何数量的致动器、传感器和计算机系统以实现该功能。
图24A和图24B示出了根据本公开的一实施方式的具有手动电池更换的起飞和降落台。在所描绘的实施方式中,UAV降落在结构的屋顶上,并且在该结构中的工作人员向UAV供应包裹和额外的电力(例如电池更换)。如图所示,UAV可以降落在轨道或传送带上,其跨过该结构的顶部移动UAV,以允许工作人员附上包裹并更换电池或进行其它维护。
图25示出了根据本公开的一实施方式的具有摆出式降落台的移动充电站。所描绘的示例示出了主轴,其具有附接到主轴的多个降落台,并且降落台联接到主轴以向着卡车的驾驶室向内摆动。在所描绘的实施方式中,卡车的一部分已经被转变成包括操作员系统。操作员可以将电池和包裹附在UAV上/从UAV上取下电池和包裹。当降落台从卡车驾驶室伸出时,UAV可以降落在降落台上。一旦UAV降落并被固定好,就可以将降落台朝向卡车旋转以接收新的包裹。当准备好部署UAV时,可以再次将其旋转离开卡车驾驶室。
图26A-26E示出了根据本公开的实施方式的移动充电站。具体地,图26A和图26B示出了根据本公开的一实施方式的可扩展的移动充电站2600。可扩展的移动充电站2600包括主体2640和可扩展部分2645。主体2640和可扩展部分2645可以被安装在诸如半卡车的拖车的运载工具2670上或在任何类型的运载工具上。主体2640和可扩展部分2645可以由钢、铝、热塑料或其它材料制成。可扩展部分2645可以在轨道或其它类似机构上移动。
可扩展的移动充电站2600还可以包括进入点2620和靠近进入点2620的第一航行辅助装置407a。进入点2620可以由主体2640限定,如图26B所示。然而,进入点也可以位于主体2640或可扩展部分2645上的任何点处,包括顶部、侧面或端部(示出的)。
当运载工具2670停止时,可扩展部分2645可以从主体2640延伸。进入点2620可以通过可扩展部分2645延伸而打开,或者可以包括用于关闭和打开进入点的门或其它机构。进入点2620可以被确定尺寸以允许UAV通过进入点进入或离开可扩展的移动充电站2600的内部。
图26C是可扩展的移动充电站2600的鸟瞰图,具有贯穿其屋顶的视图。如图26C所示,可扩展的移动充电站2600还可以在可扩展的移动充电站2600的内部包括发电机2610和多个降落台403。降落台403可以包括充电电路系统409和第二航行辅助装置407b,类似于关于本发明的其它示例实施方式讨论的那些。
图26D是从运载工具的后部透过可扩展的移动充电站2600的后壁看到的可扩展的移动充电站2600的视图。可扩展的移动充电站2600可以包括多个水平的降落台403,使得一些降落台403竖直地高于其它降落台403。降落台403可以包括充电电路系统409。可扩展的移动充电站2600的内部和外部可以包括航行辅助装置407a-c,以将UAV引导到可扩展的移动充电站2600的内部并且引导到降落台403。
当可扩展部分2645扩展时,一些降落台403可以与可扩展部分2645一起移动。因此,当可扩展部分2645扩展时,用于使UAV移动通过的通道可以在降落台403之间被向上打开。重新陈述,附接到可扩展部分2645的降落台403可能太靠近连接到主体2640的降落台,以至使UAV在可扩展部分2645未扩展时无法在其之间通过。通过将可扩展部分2645移动到扩展位置,降落台403分离,使得UAV可以在降落台403之间通过以下降或上升到不同水平的降落台403。
图26E是移动充电站2600'的备选实施方式。如图15A-D所描绘的,移动充电站2600'可能不可扩展,并且可以包括模块化的壳体结构1500(或1501、1502、1503)。UAV可以通过进入点2620'进入和离开移动充电站2600'的内部。移动充电站2600'还可以包括发电机2610和用于直接或间接地与UAV通信的通信控制器2650。通信控制器2650可以与模块化壳体结构1500中的通信控制器1560通信以控制UAV的存放。
将理解,在这里描述的所有移动实施方式可以包括计算机、发电机2610(或其它电源)以及用于与UAV进行通信、执行机械操作等的通信控制器2650。
图27示出了根据本公开的一实施方式的具有手动电池交换和存放的壳体结构。如所描绘的,壳体结构包括电池充电站和UAV存放。在所描绘的实施方式中,壳体结构被操纵。UAV可以向上飞到一个打开的窗口,并且操作员更换电池、附上包裹或将UAV送去维修等。在发射UAV时,操作员可以将UAV放在第二个窗口之外的发射台上。
图28示出了根据本公开的一实施方式的具有部分自动的电池更换和存放的壳体结构。在所描绘的示例中,UAV吞吐过程的一部分是自动化的。UAV可以降落在线或杆上,其将UAV运送到信息亭中。操作员可以更换电池或将UAV放在充电支架上或将其卸下以进行维护。操作员可以装载包裹并将飞行器放到线上,在线上其经由滑轮被运送到起飞区(左)。一旦操作员将“全部清除”信号输入计算机系统(其可以包括按下按钮),以指示操作员和其它物体已经脱离了UAV,飞行器就可以直接从线上起飞。
图29A和图29B示出了根据本公开的一实施方式的用于手动电池更换和存放的滑出柜。在所描绘的示例中,降落台可以从柜的顶部向外伸出。然后,可以从顶部手动或自动将UAV放置到内部的存放部中。如所示的,该存放部还包括多个电池,其能够被更换到UAV中或被更换到UAV之外。所描绘的壳体结构可以插入电源中,以对其中包含的电池和UAV进行充电。
图30A-C示出了根据本公开的一实施方式的用于手动电池更换和存放的滑出柜的另一示例。图30A中描绘的壳体与图29A中描绘的壳体类似,但是滑出式降落台构造不同。降落台从柜的背面伸出,其滑入柜中用于存放。滑动可以是手动或自动的。
根据计算机软件和硬件描述了上述工艺。所描述的技术可以构成包含在有形或非暂时性机器(例如计算机)可读存储介质中的机器可执行指令,该机器可执行指令在由机器执行时将使机器执行所描述的操作。另外,所述工艺可以在诸如专用集成电路(“ASIC”)的硬件或其它情况中体现。
有形的非暂时性机器可读存储介质包括以机器可访问的形式提供(即,存储)信息的任何机制(例如计算机、网络设备、个人数字助理、制造工具、具有一组一个或更多个处理器的任何装置等)。例如,机器可读存储介质包括可记录/不可记录介质(例如只读存储器(ROM)、随机存取存储器(RAM)、磁盘存储介质、光学存储介质、闪存装置等)。
包括摘要中描述的内容的本发明的所说明的实施方式的以上描述不旨在穷举或将本发明限制为所公开的精确形式。尽管在这里出于说明性目的描述了本发明的特定实施方式和示例,但是如相关领域的技术人员将认识到的,在本发明的范围内可以进行各种修改。
可以根据以上详细描述对本发明进行这些修改。在以下权利要求中使用的术语不应被解释为将本发明限制为在说明书中公开的特定实施方式。而是,本发明的范围将完全由以下权利要求确定,以下权利要求将根据权利要求解释的既定原则被解释。
- 无人驾驶运载工具壳体
- 使用无人驾驶运载工具维修灯具