一种自动垃圾分类回收装置
文献发布时间:2023-06-19 10:10:17
【技术领域】
本发明属于垃圾处理技术领域,具体涉及一种自动垃圾分类回收装置。
【背景技术】
现有的垃圾分类装置多为人工分类,即便有的自动垃圾分类装置,也多为依靠声音采集识别系统或人脸识别系统,或者是需要垃圾分类投放,使得整体的垃圾分类装置仍然需要人工参与。
部分不需要人工参与的垃圾分类装置,多为直线传送带装置,使得整个垃圾分类装置占地面积较大。
【发明内容】
本发明的目的在于克服上述现有技术的缺点,提供一种自动垃圾分类回收装置,以解决现有的垃圾分类回收装置自动化程度不高,且占地面积大的问题。
为达到上述目的,本发明采用以下技术方案予以实现:
一种自动垃圾分类回收装置,包括同轴的上筒壁和下筒壁,上筒壁和下筒壁通过竖直方向的四个隔板连接,四个隔板围绕上筒壁轴线等分布置;相邻的隔板之间设置有垃圾承载桶;下筒壁的上端面设置有挡板,下筒壁的下端面设置有底座;
上筒壁中设置有垃圾投放层,垃圾投放层的中间设置有可闭合的垃圾投放口;
垃圾投放层的下方设置有半球形凸台,半球形凸台在垃圾投放口的下方;半球形凸台的下方设置有环状的同心圆平台,同心圆平台的外侧边和筒壁固定连接,同心圆平台的内侧边转动连接有可转动转盘,可转动转盘中间设置有垃圾进入口,可转动平台在半球形凸台的下方;可转动平台上滑动设置有推板,推板的外端面固定连接有可伸缩的推杆,推杆的外端和同心圆平台固定连接,推杆和第三电机连接;
半球形凸台的下表面设置有识别摄像头;
底座上设置有电池和集成电路,集成电路和识别摄像头电连接,集成电路和第三电机电连接;
所述上筒壁、垃圾投放口、半球形凸台、同心圆平台和可转动转盘同轴线。
本发明的进一步改进在于:
优选的,所述垃圾投放层包括环状板,环状板的外侧壁和上筒壁固定连接;环状板的上表面环状阵列设置有三角板;所述垃圾投放口由三角板的内侧边围绕组成。
优选的,所述三角板的后端固定连接有连接杆,连接杆穿过环状板,连接杆下端固定连接有传动杆,;
环状板的下端面固定连接有支撑杆,传动杆的一端套装在支撑杆上;
支撑杆的沿环状板的周向阵列设置,支撑杆的长度方向为环状板的径向。
优选的,所述传动杆和第一电机的输出端连接。
优选的,半球形凸台的下端面通过细杆和承载部分固定连接。
优选的,所述推杆由两个相互铰接的活动杆组成。
优选的,所述可转动转盘的下端面设置和其同轴的被动齿轮,被动齿轮啮合有主动齿轮,主动齿轮的轴线和同心圆平台固定连接,主动齿轮的轴线连接有第二电机。
优选的,所述推杆的外端连接有第三电机。
优选的,所述垃圾承载桶和挡板滑动连接。
优选的,每一个承载垃圾桶的截面为扇形;底座和下端面设置有万向轮。
与现有技术相比,本发明具有以下有益效果:
本发明公开了一种自动垃圾分类回收装置,该分类回收装置整体从上到下分为三部分,分别为上筒壁、垃圾承载桶和下筒壁;上筒壁中设置有垃圾投放层,垃圾投放层的下方设置有半球形凸台,半球形凸台的下方设置有环状的同心圆平台,同心圆平台的内侧边转动连接有可转动转盘,可转动转盘上设置有推杆和推板,本发明通过识别摄像头将图像传递至集成电路,集成电路根据识别的结果,推动对应的第三电机移动,实现对应垃圾进入到垃圾承载桶中,本发明通过图像识别系统,识别垃圾类型,且较一般声音采集识别系统来说,准确性更高,本发明采用圆形运输带实现垃圾的传送与运输,较一般直线型运输带,大大缩小了垃圾桶的尺寸,方便居家使用,通过半球形垃圾分散装置和四个推杆装置,配合识别系统,可以一次性完成不同种类垃圾,多件数垃圾的同时分类,较一般直线传送带装置必须分开投放和依次进行分类回收装置相比,大大提高了分类效率。
【附图说明】
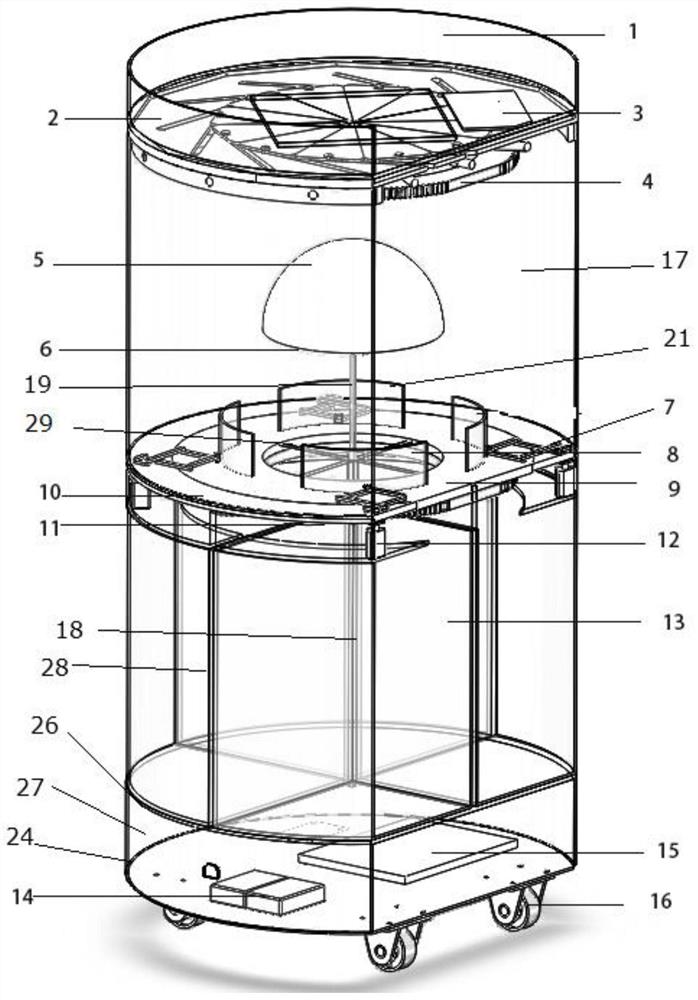
图1为本发明的立体结构示意图;
图2为本发明的立体结构剖视图;
图3中的(a)图为垃圾投放层的仰视图;
图3中的(b)图为垃圾投放层的俯视图;
图4为半球形凸台的立体图一;
图5为半球形凸台的立体图二;
图6为转盘装置和推杆装置的立体透视图;
图7为转盘装置和推杆装置的立体图;
图8为转盘装置和推杆装置的仰视图;
其中:1-上护盖;2-垃圾投放口;3-LED显示屏;4-垃圾投放层;5-半球形凸台;6-识别摄像头;7-推杆;8-垃圾进入口;9-可转动转盘;10-同心圆平台;11-红外摄像头;12-第三电机;13-垃圾承载桶;14-电池;15-集成电路;16-万向轮;17-上筒壁;18-中央固定杆;19-细杆;21-推板;22-被动齿轮;23-主动齿轮;24-底座;25-活动杆;26-挡板;27-下筒壁;28-隔板;29-连接支撑杆;4-1-环状板;4-2-三角板;4-3-连接杆;4-4-传动杆;4-5-支撑杆。
【具体实施方式】
下面结合附图对本发明做进一步详细描述:
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制;术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性;此外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
参见图1和图2,本发明公开了一种自动垃圾分类回收装置,该垃圾分类装置主要分为四个部分:投放部分、分流部分、承载部分和电池部分。整个垃圾分类回收装置为圆柱体结构,包括同轴的上筒壁17和下筒壁27,上筒壁17和下筒壁27之间为承载部分。上筒壁17和下筒壁27通过四个竖直的隔板28固定连接,四个隔板28沿着上筒壁17周向等分分布。
投放部分由上护盖1、LED显示屏3和垃圾投放层4组成,圆柱形的上筒壁17的上端设置有上护盖1,所述上护盖1和上筒壁17的上端为铰接关系,使得上护盖1能够掀开,上护盖1起支撑与保护作用,上护盖1上设置有LED显示屏3和太阳能电池板;上筒壁17的上端设置有光敏传感器,光敏传感器和集成电路15连接。
参见图3,护盖1的下方设置有垃圾投放层4,垃圾投放层4包括环状板4-1,环状板4-1的外侧壁和上筒壁17的内部固定连接,环状板4-1的上表面环状阵列设置有三角板4-2,三角板4-2的后端通过连接杆4-3和传动杆4-4连接,连接杆4-3垂直于环状板4-1,传动杆4-4和支撑杆4-5均设置在环状板4-1的下表面,支撑杆4-5的长度方向为环状板4-1的径向方向,传动杆4-4的一端套装在支撑杆4-5上,另一端和连接杆4-3的下端固定连接,使得传动杆4-4沿着支撑杆4-5移动时,传动杆4-4同时沿着环状板4-1的径向方向移动,与此同时传动杆4-4带动连接杆4-3,进而带动三角板4-2移动。一个三角板4-2对应一个连接杆4-3和一个传动杆4-4,以及一个支撑杆4-5,所有的支撑杆4-5沿着环状板4-1的周向阵列设置。三角板4-2内侧边的设置方向为环状板4-1内圆的切向方向,使得所有的三角板4-2的内侧边组成一个圆,组成的圆为垃圾投放口2,每一个传动杆4-4上连接有一个第一电机,为其提供动力。
考虑到垃圾桶需要实现对垃圾的气味进行隔绝、对垃圾的种类在识别后能够在某一部位显示出来、并且可以通过太阳能电池板实现自行的充电和储存电力,故根据最后所需要实现的功能,本垃圾回收装置在顶部上护盖1的设计方面进行了精心构造,上护盖1为圆形,并且在投放口的下方设有显示屏和太阳能电池板,显示屏可以在内部的识别系统完成对不同类型的垃圾的识别后,将信息传递并显示在显示屏上,以便于使用者更好地使用垃圾箱,便于使用者查看垃圾分类是否正常运行。而在垃圾箱的平面上还设有太阳能电池板,以此来实现通过光能完成电池的充电和电力储存,这样的设计也在一定程度上减少了电力的损耗,实现垃圾箱自行运转,使得垃圾箱的设计在一定程度上更加绿色环保。
为了更好地实现对垃圾气味的密封和隔绝,垃圾箱的垃圾投放层4处有类似旋转结构的三角板4-2构成的密封装置,该三角板4-2可由下方的第一电机带动旋转,三角板4-2会沿各自的轨道推动,进而实现在平面内四散打开和相互聚合,聚合后形成一个完整的圆形封闭面,最终完成对垃圾气味的气味封闭,更好地实现了垃圾桶的气味封闭功能。
LED显示屏3和集成电路15连接,在投放垃圾时,会显示出识别的垃圾种类;在垃圾承载桶13过载时会显示报警。
当上护盖1打开时,垃圾投放层4的所有三角板4-2向外运动,使得在环状板4-1的中间位置形成投放口3;当上护盖1关闭时,投放口3关闭,感应到有人投放垃圾时,自动将投放口3打开,投放完毕后,自动关闭。
在垃圾投放层4的下方设置有分流部分,分流部分由半球形凸台5、识别装置、推杆装置、转盘装置和满载报警装置组成。
参见图4和图5,在垃圾通过垃圾箱的开口后会由一个固定在中心的表面光滑的半球形凸台5将垃圾四散打乱,实现大量垃圾进入垃圾箱后会被四散分开掉落在下方的可转动转盘9上,半球形凸台5的上表面为半球形,下表面为平面,半球形凸台5的下表面和细杆19的上端固定连接,细杆19的下端和垃圾承载桶13的中央固定杆18固定连接。该结构使得中心的半球形凸台13的下方部分却是由细杆19构成为悬空状态,便于后来的垃圾推杆装置最后推动垃圾通过缺口掉入下面的不同种类的垃圾承载桶13内。半球形凸台13的下表面设置有四个识别摄像头6,为识别装置,四个识别摄像头6呈两两对称的结构,在半球形凸台5的下表面等分布置,每一个识别摄像头6对应一个垃圾承载桶13。
参见图6和图7,在半球形凸台5的下方设置有转盘装置,转盘装置包括环状的同心圆平台10,同心圆平台10的外侧边和上筒壁17的内部固定连接,同心圆平台10的内侧边和可转动转盘9接触,可转动转盘9环状结构,可转动转盘9通过连接支撑杆29和中央固定杆18转动连接,使得可转动转盘9能够相对于中央固定杆18转动,可转动转盘9中心的圆孔为垃圾进入口8,垃圾进入口8的面积小于半球形凸台5下表面的面积;转盘装置上设置有推杆装置,推杆装置包括四个推杆7,四个推杆7沿同心圆平台10的周向等分布置,每一个推杆7的一端和同心圆平台10固定连接,推杆7的另一端固定连接有一个推板21,推杆7为可伸缩式结构,优选的,推杆7包括两个相互铰接的活动杆25,两个活动杆25为弯折的结构,两个活动杆25通过铰接形成两个菱形,进而形成可伸缩的推杆7。推板21是四个弧形结构的具有一定高度的平板,推板21的弧度和垃圾进入口8的弧度相等;每一个推杆7和一个第三电机12连接,第三电机12和集成电路15连接。
参见图8,关于可旋转的同心圆平台10的运转的工作原理,可旋转转盘9的下部固定连接有被动齿轮22,被动齿轮22和可旋转转盘9同轴线;被动齿轮22和主动齿轮23啮合,主动齿轮23和同心圆平台10的轴线固定连接。主动齿轮23的轴线连接有第二电机,同心圆平台10旋转的动力传动机构是靠下方的齿轮和可旋转转盘9的齿轮相互啮合,形成转动。在第二电机带动下,主动齿轮23旋转时带动被动齿轮22旋转,进而带动可转动转盘9的旋转,从而实现带动垃圾在缓缓旋转,以此让上方的四个识别摄像头6对垃圾进行识别。
垃圾在通过半球形凸台5的打散掉落在圆形可旋转的同心圆平台10后,可旋转的同心圆平台10缓慢转动,在下部电机带动的齿轮转动下带动可旋转同心圆平台10旋转,在缓慢转动的过程中固定在半球形凸台5上的摄像头对垃圾进行识别,当识别到垃圾后,可旋转的垃圾同心圆平台10停止旋转,在垃圾后方的垃圾箱推板21通过铰链机构沿固定的轨道滑动推出,最终将识别出的垃圾推动掉入下方固定的不同种类的垃圾桶内。
所述同心圆平台10的下表面设置有四个红外摄像头11,每一个红外摄像头11对应有一个垃圾承载桶13,四个红外摄像头11用于识别垃圾桶内的装载量,当识别到垃圾桶装满垃圾时,会将信息传送给集成电路15,集成电路15在LED显示屏3上显示。
分流部分的下方设置有四个垃圾承载桶13,四个垃圾承载桶13组成的圆柱体,每一个垃圾承载桶13的截面为扇形,四个承载垃圾承载桶13的截面均为扇形,四个承载垃圾桶13的中心位置在中央固定杆18汇合,中央固定杆18固定设置在底座24上,四类垃圾桶13分别用于为:可回收垃圾桶、厨余垃圾桶、有害垃圾桶和其他垃圾桶。可回收垃圾桶:主要包括废纸、塑料、玻璃、金属和布料五大类。厨余垃圾桶:主要包括剩菜剩饭、骨头、菜根菜叶、果皮、卫生纸、果壳等。有害垃圾:主要包括含有对人体健康有害的重金属、有毒的物质或者对环境造成现实危害或者潜在危害的废弃物。包括电池、荧光灯管、灯泡、水银温度计、过期药品等其他垃圾:主要包括砖瓦陶瓷、渣土、卫生间废纸、瓷器碎片等难以回收的废弃物;下筒壁27的上端设置有挡板26,挡板26在每一个垃圾承载桶13下方设置有滑轨,每一个垃圾承载桶13的下表面固定连接有一个滑块,滑块和滑轨配合,使得垃圾承载桶13能够沿着该滑轨拉出。四个垃圾桶在挡板26上被四个隔板28分隔开来,各自的上方对应各自的推板21和红外摄像头11,当垃圾被识别后推板21会推动垃圾从垃圾进入口8掉落下去,对应各自的垃圾会掉入各自的垃圾承载桶13内,从而实现将不同的垃圾分类开来,简便又快捷,垃圾承载桶13是可活动的,可以通过人手取出和放入,便于垃圾满溢后的取出清除,在四个垃圾承载桶13的上方有红外摄像头11,红外摄像头11在感应到垃圾填满垃圾桶后,将信号传递至集成电路15,集成电路15在LED显示屏2上显示,提醒垃圾桶需要清除。
在底座24上上设置有四个万向轮16可使垃圾回收收集装置能够便于随意移动,使得垃圾桶的使用更加方便贴心,万向轮16有自锁机构,移动到指定位置后,可锁定万向轮16。
底座24上固定设置有电池14和集成电路15,集成电路15和电池14连接,电池14和太阳能电池板连接,集成电路14和光敏传感器、红外摄像头11、识别摄像头6以及第三电机12连接。识别摄像头6将垃圾图片传递至集成电路15,集成电路15根据识别出的垃圾类型使对应的第三电机12工作,第三电机12带动对应推杆7工作,推杆7推动推板21将垃圾推入至对应的垃圾承载桶13中;电池和第一电机、第二电机和第三电机连接。
控制过程为,上护盖1打开后,光敏传感器将将信号传递至集成电路15,集成电路15驱动第一电机和第二电机工作,第一电极带动传动杆4-4始运动,与此同时带动三角板12-2向各自的径向后端移动,进而形成投放口3,垃圾通过半球形凸台5落入至可转动转盘9上,可转动转盘9在第二电机的驱动下转动,与此同时,四个识别摄像头6开始采集图形,识别摄像头6将采集到的图像传递至集成电路15,集成电路15根据识别出的垃圾类型驱动第三电机运动,第三电机推动对应的推杆7移动,推杆7推动推板21将垃圾推入至对应的垃圾承载桶13中。集成电路15将信息传递至LED显示屏3,显示垃圾类型;当红外摄像头11识别到垃圾承载桶13中满时,传递至集成电路15,集成电路15在LED显示屏3上显示。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种自动垃圾分类回收装置
- 一种具有自动改变空间大小结构的垃圾分类回收装置