通过反解法实现的全电高精度六自由度平台
文献发布时间:2023-06-19 11:21:00
技术领域
本发明专利提供通过反解法实现的全电高精度六自由度平台,涉及电作动技术领域以及电控技术领域。
背景技术
随着科技的快速发展,高精度六自由度平台在航空、航天等领域得到了广泛的应用,例如各种高精度空间相机主镜、次镜空间展开、空间组装的控制平台、快速光子对准系统、微生产和激光材料加工等领域,甚至可用到空间宇宙飞船的对接,空中加油机的加油对接中。近年来,随着对高精度六自由度平台需求的不断增长,现有六自由度平台从精度、数量、功能和性能上都远不能满足需求,因此急需高精度的六自由度平台来满足要求。
目前市场上的六自由度平台复杂多样,按照其结构形式通常可以分为液压式六自由平台、电动式六自由度平台等几种,液压式六自由度平台结构紧凑、工作平稳、有自锁作用,可进行较大载荷试验,但其安全性和精度较低,提升速度慢,起重高度也有限,容易漏油,寿命较短,无法适应于多种恶劣环境,电动式六自由度平台的出现很大程度上解决了以上问题。
发明内容
本发明针对上述问题,提供了一种真正意义上的纯全电化高精度六自由度平台,配置电控系统,结构上更加简单,采用反解算法对平台姿态进行补偿,提高了六自由度平台的精度,同时使六自由度稳定平台体积更小、噪音更低,可靠性更高、安全性更好、环境适应性更强。
为达到上述目的,本发明采用的技术方案如下:
通过反解法实现的全电高精度六自由度平台,其特征在于:包括上平台、下平台、电作动机构以及电控系统,所述上平台和下平台与所述电作动机构的缸筒鱼耳通过虎克铰连接,所述上平台下端设有虎克铰,所述虎克铰与所述缸筒鱼耳使用螺栓连接,所述下平台上表面设有电控箱,所述上平台可以安装负载,中间部位安装所述电作动结构,所述电作动机构包括:电机、缸筒组件,其中缸筒组件包括:丝杠副、推杆、缸筒和轴承座等组件,所述电控系统包括:驱动器、运动控制器、电源转换模块、测量反馈装置、操作盒。
上平台下侧设置虎克铰,电作动机构通过缸筒鱼耳螺栓连接在所述上平台上。下平台上侧设置虎克铰,电作动机构通过鱼耳螺栓连接在所述下平台上。
电作动机构工作原理是电机通过与缸筒组件直线设置,所述电机与丝杠副之间设置联轴器,将所述电机输出的动力传递到丝杠副,所述丝杠副通过轴承座组件支撑旋转,丝杠螺母在导向键约束下带动推杆进行直线运动,所述推杆带动负载可以进行六个姿态的运动:包括横摇、纵摇、艏摇、横移、纵移、升沉,运动过程中通过反解法进行实时补偿,保证更高的精度。
缸筒内壁对称设有键槽,进行所述推杆轴向限位,在缸筒的两端极限位置设有电气限位的机械接口。
丝杠副采用滚珠丝杠,它是将旋转运动转化为直线运动的机构,在螺母和丝杠中间的滚动元件为滚珠,滚珠丝杠的优势在于能够提供超高的精度。
电控系统的供电电源采用直流电输入接口,使全电高精度六自由度平台更适用于与其他各类设备上匹配,且在运行过程中有更好的抗干扰能力。
控制回路使用的运动控制器同时控制六台所述驱动器驱动电机动作,拥有电气限位信号通过所述运动控制器进行极限位置保护。
电机驱动器的环境温度适用于零下10摄氏度到零上65摄氏度,内置速度环、位置环可实现所述全电高精度六自由度平台的速度及位置控制,通过内部最大电流的限制保护,可实现所述全电高精度六自由度平台的安全保护,通过所述电机驱动器将报警信号引出,外接报警指示灯。
本发明的有益效果是:本发明提供了通过反解法实现的全电高精度六自由度平台,提供了一种真正意义上的全电高精度六自由度平台,配置可独立工作的电控系统,结构上更加简单,安全性更有保障,大幅度提高了使用的便捷性以及高精度要求,具有成本更低、动态响应能力更强、可靠性更高、安全性更好、环境适应性更强的特点。
附图说明
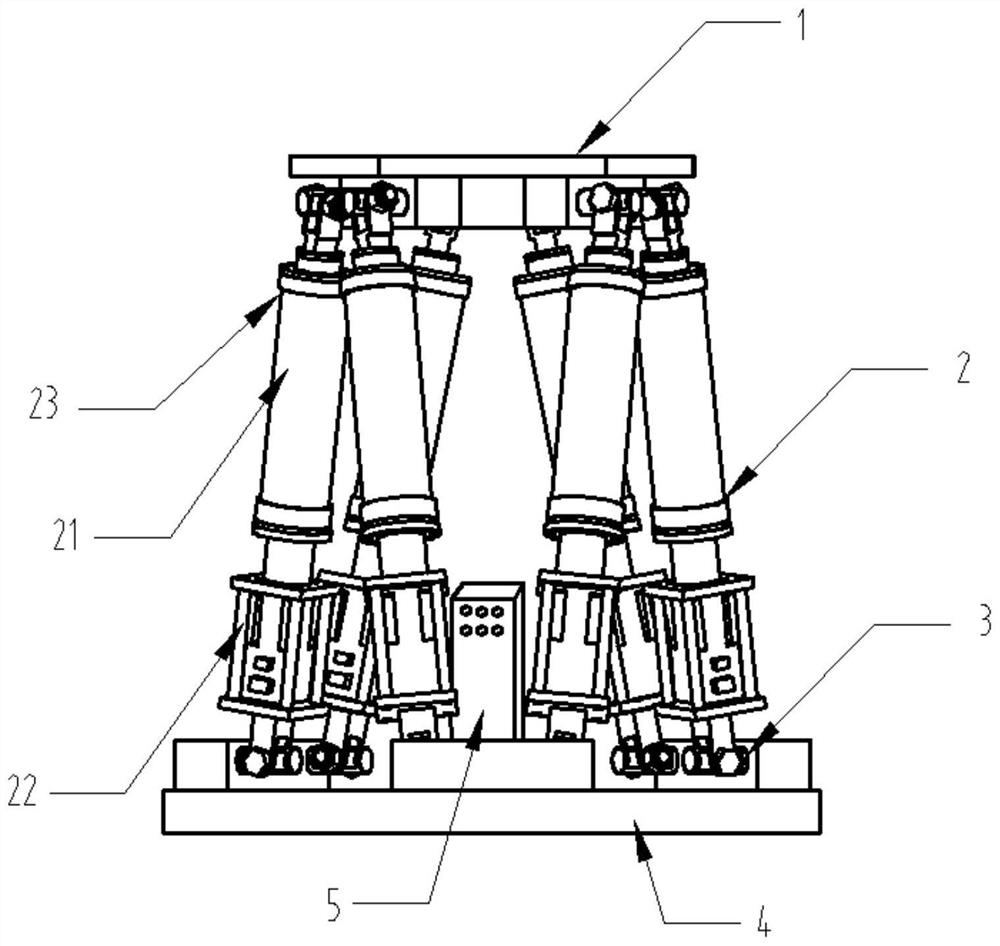
图1为本发明的结构示意图;
图2为本发明电作动机构的示意图;
图3为本发明电控系统原理图;
【附图标记说明】
1、上平台;2、电作动机构;3、虎克铰;4、下平台;5、电控箱;21、缸筒组件;211、导向键;212、读数头;22、电机;221、电机动力航插;222、电机编码器航插;23、电气限位开关组件;24、推杆;241、缸筒鱼耳;242、丝杠支撑座组件;243、丝杠副;244、丝杠副螺母;245、光栅尺组件;25、电机外罩;251、电机外罩鱼儿;26、联轴器;61、运动控制器;62、驱动器;63、电源转化模块;64、操作盒。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清晰,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚的描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-3,如图1所示,通过反解法实现的全电高精度六自由度平台包括上平台1、下平台4、电作动机构2以及电控系统,所述上平台1和下平台4与所述电作动机构2的缸筒鱼耳241通过虎克铰3连接,所述上平台1下端设有虎克铰3,所述虎克铰3与所述缸筒鱼耳241使用螺栓连接,所述下平台4旁设有电控箱5,所述上平台1可以安装负载,中间部位安装所述电作动结构2,所述电作动机构2包括:电机外罩25、推杆24、电气限位开关组件23、电机22、缸筒组件21,其中缸筒组件21包括:导向键211、读数头212,其中推杆24包括:缸筒鱼耳241、丝杠支撑座组件242、丝杠副243、丝杠副螺母244、光栅尺组件245,所述电控系统包括:驱动器62、运动控制器61、电源转换模块63、操作盒64、测量反馈装置65。
进一步,所述通过反解法实现的全电高精度六自由度平台上下平台连接设置虎克铰3,电作动机构2通过缸筒鱼耳241螺栓连接,支撑架上端采用螺栓连接,可实现快捷拆装。
进一步,所述电作动机构2通过对各组件强度、寿命进行校核,选用可满足使用的组件,同时对各组件进行标准化设计和轻量化设计,缸筒优选标准铝合金型材,极大的降低了成本,最终在性能方面提升的同时降低整个通过反解法实现的全电高精度六自由度平台的价格,提供了一种成本低且安全可靠的全电高精度六自由度平台。
进一步,所述通过反解法实现的全电高精度六自由度平台,优选滚珠丝杠,可实现六自由度平台高精度运行。
进一步,所述缸筒组件21内壁两侧设有键槽,进行径向限位,上下两端极限位置上设置电气限位开关组件23,保障全电化六自由度稳定平台的安全使用。
进一步,所述电控系统包括驱动器62、运动控制器61、电源转换模块63、操作盒64,供电电源具有直流电输入接口,供给电机22及驱动器62,内部再通过电源转换模块将高压直流电转换为低压直流电,供给运动控制器61,真正做到了纯电动工作,适用于户外工作使用。
进一步,所述控制电路,使用操作盒64启动按钮启动全电高精度六自由度平台,能够自动姿态变化,按钮之间相互锁定,避免操作失误损坏设备,控制系统简单高效。
进一步,所述控制系统,选用宽温型电气元件,控制电路元器件安装固定于电控箱5内,采用电连接器进行外部线缆连接,可适应于高低温、沙尘、淋雨、涉水、高海拔等各种复杂的环境。
进一步,所述电控系统通过操作盒64上的按钮控制全电高精度六自由度平台的姿态变化,另设有急停按钮可在紧急情况下紧急断电。在所述电作动机构2缸筒组件21上下极限位置设有限位开关进行行程安全保护,限位信号串联入运动控制器61中,正向伸出到达上限位时,继续操作无动作,仅允许反向操作。
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
尽管本文较多地使用了上平台、下平台、电作动机构、电控系统、电机、电源转换模块、测量反馈装置、丝杠副等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质,把它们解释成任何一种附加的限制都是与本发明精神相违背的。
- 通过反解法实现的全电高精度六自由度平台
- 一种高精度的多关节串联机械臂运动学反解解法