一种基于PLC的自动组装马达pin脚系统
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及汽车生产装配领域,具体是一种基于PLC的自动组装马达pin脚系统。
背景技术
为了满足市场需求,常见汽车门锁有各种类型,它们的样式和尺寸都不相同。
汽车的安全核心部件就是门锁,门锁质量的好坏不仅关系到车主个人财产安全,更是与使用者及其家人的人身安全息息相关。现有汽车门锁内部马达需要外部供电,接收外部信号实现相应功能,汽车门锁在装配过程中需要组装插针,插针pin脚一端与马达相连,另一端与外部供电系统和信号交互系统相连。在汽车门锁生产装配过程中,pin脚装配的正确性对于马达的正常供电,门锁功能的实现具有重要意义,直接关乎到门锁核心功能部分。
由于门锁种类繁多,不同类型的门锁所需信号不同,因此针脚的组装位置与数量也不尽相同,造成了人工组装的难度;此外,pin脚尺寸较小,不仅取料困难,对定位精度要求也很高,加剧了人工组装的难度和组装的效率,传统的人工插pin脚不仅效率低,对于各种不同门锁pin脚数量的记忆也存在难度,尤其在自动化和集成度较高的生产线中,一条生产线可能会同时具备生产多种型号汽车门锁的功能,传统的人工方式难以满足市场需求。
发明内容
本发明的目的在于提供一种基于PLC的自动组装马达pin脚系统,它提高了生产效率和生产质量,减少生产过程中的损耗,推动门锁生产装配过程逐渐向全自动化迈进,实现兼容多种不同类型门锁的全自动化生产装配。
本发明为实现上述目的,通过以下技术方案实现:
一种基于PLC的自动组装马达pin脚系统,包括控制系统、定位工装台,所述定位工装台上设有多个料仓,所述定位工装台一侧从左至右依次安装有ABB机器人、相机支架、定位支架;
所述相机支架上设有多个与料仓位置、数目相对应的相机;
所述ABB机器人的末端设有取料夹头,通过所述取料夹头将插针抓取放置到定位支架上;
所述相机支架底部的定位工装台上设有多个与料仓位置、数目相对应的导轨,且所述导轨位于定位支架上方,所述导轨由伺服电机驱动,多个所述导轨上均设有放料夹头,通过所述放料夹头抓取定位支架上的插针并安装到壳体上的对应位置。
进一步的,所述定位支架上设有料盒、放料台、重量传感器,所述放料台上设有与插针形状相适应的凹槽,所述定位支架上还设有用于固定插针位置的对齐装置。
进一步的,多个所述料仓的出料口处均设有震动盘。
进一步的,所述定位支架远离定位工装台的一侧设有线体,所述线体上滑动设有工装板,所述线体远离定位工装台的一侧设有多个与料仓位置、数量相对应的辅助压板。
进一步的,所述辅助压板底部设有高度定位缸,所述辅助压板上部设有插针定位缸,通过所述高度定位缸定位壳体高度,通过所述插针定位缸定位插针的位置。
进一步的,所述线体上还设有用于检测壳体有无的红外对射传感器。
进一步的,所述放料夹头包括主夹爪和辅助夹爪,所述主夹爪夹持插针下部,所述辅助夹爪夹持插针上部。
对比现有技术,本发明的有益效果在于:
采用可编程的控制系统,结合ABB机器人等一系列智能化控制的动力结构实现自动组装汽车门锁马达pin脚,还能实时监控系统运行状况;相较于传统的人工操作组装,本发明的自动取料组装的结构,提高了安装过程的工作效率和自动化程度,减少了生产过程中的损耗,适应于工业现场应用,实现兼容多种不同类型门锁的全自动化生产装配。
附图说明
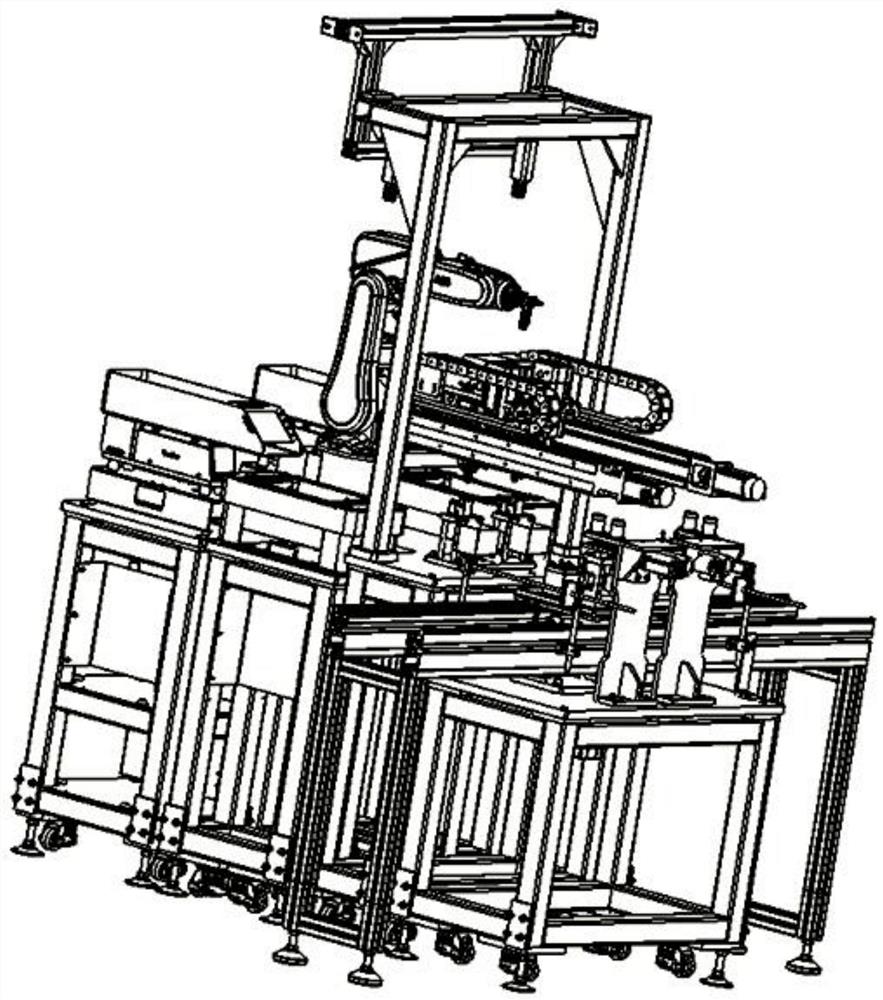
附图1是本发明的结构示意图。
附图2是本发明的工作原理图。
附图3是本发明的自动控制流程图。
附图4是本发明的主视结构示意图。
附图5是本发明的俯视结构示意图。
附图6是本发明的侧视结构示意图。
附图7是本发明的结构示意图。
附图8是本发明的结构示意图。
附图9是本发明的结构示意图。
附图10是本发明的俯视结构示意图。
附图11是本发明的侧视结构示意图。
附图12是本发明的取料夹头结构示意图。
附图13是本发明的插针结构示意图。
附图14是本发明的放料夹头结构示意图。
附图15是本发明的辅助压板结构示意图。
附图16是本发明的定位支架结构示意图。
附图17是本发明的壳体结构示意图。
附图18是本发明的壳体结构示意图。
附图19是本发明的ABB机器人结构示意图。
附图20是本发明的定位工装台结构示意图。
附图21是本发明的震动盘结构示意图。
附图中所示标号:
1、定位工装台;2、料仓;3、ABB机器人;4、取料夹头;5、取料翻转缸;6、取料夹爪;7、震动盘;8、相机支架;9、相机;10、定位支架;11、料盒;12、放料台;13、对齐装置;14、伺服电机;15、放料夹头;16、主夹爪;17、辅助夹爪;18、线体;19、辅助压板;20、高度定位缸;21、插针定位缸;22、工装板;23、插针;24、插针上部;25、插针下部;26、壳体;27、壳体插针孔;28、壳体定位插孔;29、红外对射传感器。
具体实施方式
下面结合具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所限定的范围。
本发明所述是一种基于PLC的自动组装马达pin脚系统,主体结构包括控制系统、定位工装台1,控制系统由四部分组成,分别是:
第一,PLC的控制系统搭建,整个控制系统选用西门子S7-1500系列可编程控制器作为整个控制系统的控制核心,主要由西门子KTP700触摸屏、西门子V90系列伺服电机、24V直流电源、中间继电器、数字量输入输出模块以及各种传感器信号组成。将各种传感器信号和所需的机器人输出信号与PLC的输入端相连接。PLC的输出端与要控制的元件或机器人的外部I/O板中的输入端相连;
第二,PLC程序设计,开发自动模式下程序设计、手动模式下程序设计、报警程序设计、初始化程序设计和产品型号判断程序设计。1、自动模式下程序设计:主要采用步序控制,根据控制流程依次完成每个动作。2、手动模式下设计:以触摸屏界面设计中设置的各个动作的操作按钮为输入点,点击按钮完成相应动作。3、报警程序设计:为每个动作输出设定限制值,当超过设定值时对报警信息进行编码并显示到触摸屏的报警界面中。4、初始化程序设计:主要用于设备启动时各个机构原点位置检测及进行回原点操作。5、产品型号判断程序设计:采用PLC中4位输出点代表4位BCD码用于产品型号编码以及产品型号判断,根据读取触摸屏中的产品型号信息,自动判断产品型号,机器人根据传感器检测到的缺料信息,进行相应位置的备料动作;
第三,触摸屏界面的设计,包括产品选型画面设计、参数画面设计、手动操作画面设计、监控画面设计、报警画面设计和用户登录界面设计。1、选型画面的设计:主要是存储不同产品的型号和名称。2、参数画面的设计:用于设定不同产品换型时系统运行的程序选择、以及运行过程中的各个参数。3、手动操作界面的设计:设置各个动作的操作按钮,用于手动模式下完成汽车门锁马达pin脚的自动组装。4、监控画面的设计:自动显示系统各个单元的运行状态。5、报警画面的设计:自动显示机器人运行位置超出设定值、各气缸伸出时间或缩回时间超出设定值等故障信息;
第四,机器人控制系统设计,在机器人控制柜中将机器人上的传感器信号和所需的PLC输出信号与输入端相连接。机器人控制柜的输出端与要控制的元件或PLC的输入端相连。然后在软件中配置输入输出参数,开发机器人的初始化程序、主程序、例行程序和中断报警程序。主程序包括接收传感器的缺料信号判断左料台缺料还是右料台缺料,调用相应的例行程序对备料台进行补料操作;初始化程序主要对速度、加速度进行设定,以系统出现故障时进行复位操作等;中断报警程序用于实现机器人异常报警功能,当机器人自动运行出现异常时机器人会立刻停止运动;例行程序用于定义运动轨迹、pin脚放料位置、吐料位置以及接收发送信号等具体指令。
插针23为Z字形,分为插针上部24和插针下部25;壳体26放置于所述工装板22上,使壳体26在线体18上流动,壳体26上有6个壳体插针孔27和一个壳体定位插孔28。
定位工装台1采用框架结构,所述定位工装台1上设有2个料仓2,两个料仓2对称设置在定位工装台1上的前后两侧,每个料仓2都放置有插针23,且每个料仓2内的插针23型号不同,能对应不同型号的壳体26进行安装,所述定位工装台1一侧从左至右依次安装有ABB机器人3、相机支架8、定位支架10,ABB机器人3、相机支架8、定位支架10分别位于两个料仓2之间的对称轴线上;
所述相机支架8上设有多个与料仓2位置、数目相对应的相机9,相机9安装于相机支架8顶端,镜面朝下,用于对震动盘7中的物料进行拍照取图;
所述ABB机器人3的末端设有取料夹头4,取料夹头4由取料翻转缸5和取料夹爪6构成,取料夹爪6抓取插针23后,由取料翻转缸5翻转过后放于定位支架10处;
所述相机支架8底部的定位工装台1上设有2个与料仓2位置相对应的导轨,且所述导轨位于定位支架10上方,所述导轨由伺服电机14驱动,2个所述导轨上均设有放料夹头15,放料夹头15安装于与导轨相连的结构体上,从而通过伺服电机14驱动放料夹头15在导轨上移动,放料夹头15由伺服电机14驱动运动至定位支架10处,将定位支架10上的插针23抓取,放料时,放料夹头15运动至放料位,所述放料夹头15将所述插针23插入所述壳体26相应位置,完成插针23的安装,整个系统由控制系统控制,实现插针23的自动抓取组装,不需要人工操作组装,提高了安装过程的工作效率和自动化程度,减少了生产过程中的损耗。
优选的,所述定位支架10上设有料盒11、放料台12、光电传感器,通过光电传感器来感应是否有物料,料盒11安装于所述定位支架10远离定位工装台1的一端,用于临时存放插针23,放料台12位于定位支架10的中间位置,所述放料台12上设有与插针23形状相适应的凹槽,具有对插针23精确定位的作用,所述定位支架10上还设有用于固定插针23位置的对齐装置13,对齐装置13安装与定位支架10靠近定位工装台1的一端,当所述插针23放置在所述放料台12时,所述插针对齐装置13被压下后弹起,将所述插针23固定在特定位置,减小插针23放置过后的位置偏差。
优选的,多个所述料仓2的出料口处均设有震动盘7,通过震动盘7将其上的物料按照设定的分布震散,便于后续的抓取工作,该部件属于现有技术,其结构和原理在此不做赘述。
优选的,所述定位支架10远离定位工装台1的一侧设有线体18,所述线体18上滑动设有工装板22,工装板22在线体18上流动,用于运输壳体26,进一步实现系统的自动化,所述线体18远离定位工装台1的一侧设有2个与料仓2位置、数量相对应的辅助压板19,通过辅助压板19对壳体26的高度位置进行限定,并且能对插针23在壳体26上的安装位置进行精确定位。
优选的,所述辅助压板19底部设有高度定位缸20,所述辅助压板19上部设有插针定位缸21,高度定位缸20的气缸伸出后可将壳体26定位在一固定高度,通过所述高度定位缸20定位壳体26高度,插针定位缸21的气缸伸出后末端仿型块恰好插入壳体26pin脚凹型槽内,用于对插针23的安装位置进行精确定位。
优选的,所述线体18上还设有用于检测壳体26有无的红外对射传感器29,安装于所述线体18两侧,发射光电位于所述线体18内侧,靠近所述定位工装台1一端,接收光电位于所述线体18外侧,发射光电发射信号,接收光电接收信号,当信号被遮挡则判断当前有壳体26需要进行插针动作,进一步提升系统整体的自动化。
优选的,所述放料夹头15包括主夹爪16和辅助夹爪17,所述主夹爪16夹持插针下部25,所述辅助夹爪17夹持插针上部24,保证所述插针23被牢牢夹住,防止装配过程中脱落。
组装方法包括如下步骤:
第一步,将插针23放在料仓2内,当震动盘7内缺料时,料仓2会通过震动的方式向震动盘7输送物料,保证震动盘7一直处在有料状态;
第二步,定位支架10上的光电传感器可以感应是否有物料,缺料时,震动盘7将物料按照设定的分布将物料震散,相机9对震动盘7中的物料拍照取图,并将拍照取得的物料相对相机9的位置通过换算得到物料相对于取料夹头4的位置,并将坐标发送给ABB机器人3,机器人运动到相应位置,取料夹头4夹取物料放到定位支架10相应位置,上述过程是将震动盘7中的物料放至定位支架10上,称为备料过程;
第三步,工装板22跟随线体18流动至红外对射传感器29感应到工件时,顶升台将工装板22顶起,此时辅助压板19的壳体高度定位缸20和插针定位缸21伸出,固定住壳体26的位置,等待放料;
第四步,定位支架10上的光电传感器将感应信号传递给PLC,左右两个震动盘7上分别放有不同型号插针23,左边震动盘7一种,右边震动盘7一种,PLC根据选型判断所需插针23的数量和位置,导轨带动放料夹头15运动到定位支架10正上方相应位置,放料夹头15从放有指定型号的震动盘7内抓取物料,放料夹头15抓取插针23时,主夹爪16夹住插针下部25,辅助夹爪17夹住插针上部24,保证取料的稳定性;
第五步,放料夹头15从定位支架10上取完插针23后,由导轨移动至放料位置,放料时辅助夹爪17先松开、缩回,由主夹爪16将插针上部24插入壳体插针孔27,完成插针23的插装。
本发明的自动取料组装的结构,提高了安装过程的工作效率和自动化程度,减少了生产过程中的损耗,适应于工业现场应用,PLC根据选型判断所需插针23的数量和位置,实现兼容多种不同类型门锁的全自动化生产装配。