用于对墙壁的经改善的边缘清洁的方法
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及一种用于借助于清洁机器人进行对带有突出的踢脚板的墙壁的经改善的边缘清洁的方法。本发明还涉及一种用于执行该方法的清洁机器人。
背景技术
从US 2017 / 0 332 853 A1公知一种带有轮子以及驱动装置和抽吸装置的清洁机器人,其中该驱动装置对这些轮子进行驱动。经由抽吸装置可以吸入含尘空气。此外,该清洁机器人在前保险杠内侧具有传感器装置,该传感器装置检测该清洁机器人对障碍物的撞击。
从US 2018 / 0 149 753 A1公知一种带有激光雷达(LIDAR)传感器的自推进式设备,通过将发射器模块与接收器模块分开来使该自推进式设备的尺寸最小化。
一般来说,如今大量清洁机器人除了大多基于激光的测距传感装置作为用于导航以及必要时地图创建的主要数据来源之外还拥有带开关撞击传感器的弹簧式保险杠,简称保险杠。该保险杠用于使该清洁机器人能检测到主距离传感装置的检测范围之外的对象,其方式是该清洁机器人撞击障碍物或对象并且通过被触发的撞击传感器来将该对象识别为障碍物。这些对象一方面可能由于传感装置的横向空间分辨率有限(对象太小)而处在该检测范围之外,另一方面可能由于低于测量平面(对象太矮)而处在该检测范围之外。如果距离传感装置安装在该清洁机器人的前部或者安装在该清洁机器人的顶部,则后一种情况尤其是适用于沿着墙壁的踢脚板。
在上文提到的情况下,该清洁机器人经常撞击踢脚板,原因在于导航软件基于由距离传感装置所提供的值而假定距墙壁的多出了踢脚板的厚度的距离。因此,使用这样的清洁机器人不可能或者不太可能沿着这样的踢脚板进行边缘清洁。
发明内容
因而,本发明涉及如下问题:说明一种用于对带有突出的踢脚板的墙壁的经改善的边缘清洁的方法并且尤其是克服现有技术中的在此出现的缺点。
按照本发明,通过独立权利要求1的主题来解决该问题。有利的实施方式是从属权利要求的主题。
本发明所基于的总体思想在于:检测并考虑沿着墙壁的踢脚板的厚度,并且由此即使清洁机器人优选地仅通过距离检测器来被导航,也能够实现沿着从墙壁突出的踢脚板的经改善的边缘清洁。在此,按照本发明的用于借助于清洁机器人进行对带有突出的踢脚板的墙壁的经改善的边缘清洁的方法如下:首先,清洁机器人被激活并且例如在第一次清洁行驶时撞击墙壁的踢脚板,于是清洁机器人的撞击传感器产生第一信号并且布置在该撞击传感器上方的距离检测器检测距墙壁的第一距离。然后,清洁机器人返回并继续其第一次清洁行驶,直至该清洁机器人至少又一次撞击踢脚板为止。然后,撞击传感器产生第二信号,而距离检测器同时检测距墙壁的第二距离。接着,清洁机器人的计算机装置根据第一信号和第二信号来算出两个空间点以及延伸经过这两个空间点的第一直线。现在,在使用先前确定的距离和这两个空间点的情况下,计算机装置确定清洁机器人向墙壁的驶近极限,用于后续的清洁行驶。现在,通过所确定的第一直线和相关的距离,计算机装置能够在后续的清洁行驶时仅通过距离检测器来控制清洁机器人并且只行驶直至到达该驶近极限为止,而且由此能够实现经改善的边缘清洁。在此,距墙壁的距离可以由距离检测器通过距离传感器来测量或者从在其中预先寄存了不同空间点的距离的地图中获取。因此,按照本发明的方法使用在房间中首次执行边缘清洁时所确定的点的坐标、即第一空间点和第二空间点的坐标,在这些点的情况下,发生了与踢脚板的接触并且同时距离检测器检测到了距墙壁的距离,这些距离的值表明距墙壁的距离更大。在踢脚板平行于墙壁地安装的先验知识的情况下,可以根据这两个空间点和相关的第一和第二距离来计算踢脚板的厚度,其方式是通过这两个空间点来确定一条直线并且在导航软件中计算所确定的直线距后面的墙壁的法向距离。如果清洁机器人在此行驶到没有踢脚板的墙壁上,则距墙壁的剩余距离等于零,而该清洁机器人在撞击从墙壁突出的踢脚板时所检测到的距离大于零。因此,利用按照本发明的方法,能够实现对清洁机器人的驶近极限的自学习,并且即使在具有带踢脚板的墙壁的房间内也能够实现这一点,由此可以实现对沿着踢脚板的边缘的经改善的清洁并且借此尤其可以实现经改善的清洁效果。此外,特别有利的是:几乎仅通过距离检测器就能够实现对清洁机器人的导航,而且同时无需附加的传感装置就可以改善边缘清洁。经此,对于一个用户或多个用户来说带来了显著的额外好处。
在按照本发明的方法的一个有利的扩展方案中,清洁机器人继续其第一次清洁行驶,直至该清洁机器人再次撞击踢脚板为止,于是撞击传感器产生另一信号并且计算机装置根据该另一信号来算出相关的另一空间点。同样附属于该另一空间点的是:在清洁机器人撞击踢脚板时,距离检测器检测被分配给该另一空间点的距墙壁的另一距离。现在,只有当该另一空间点小于距根据第一和第二空间点所算出的第一直线的预定义距离时,计算机装置才考虑该另一空间点用于调节该第一直线。只要该另一空间点具有或超过距第一直线的预定义距离,该计算机装置就忽略该另一空间点。经此,能够始终对所算出的第一直线进行适配并且由此使所测量到的各个空间点的测量不确定性相对化或者补偿所测量到的各个空间点的测量不确定性。此外,利用按照本发明的方法的该有利的扩展方案,也可能的是:可靠地区分清洁机器人意外撞击障碍物以及撞击踢脚板,并且由此将清洁机器人意外撞击障碍物排除在对第一直线的调节之外。尤其是当该另一空间点具有或超过距第一直线的预定义距离时,是如此情况。因此,在这种情况下,可以以比较高的确定性推断出:该另一空间点不属于第一直线,而是由于意外撞击其它障碍物所造成的。经此,也可以产生对于用户来说能感知到的自学习效果,而且同时可以减少由于反复撞击而可能存在的关于踢脚板损坏的担忧。
在按照本发明的方法的另一有利的实施方式中,计算机装置根据在至少第一和第二空间点处所检测到的距墙壁的距离来算出第二直线并且如果在这两条直线之间的预定义的角度偏差被超过则丢弃第一直线。即,通常,通过至少第一和第二空间点所绘制的第一直线必须平行于墙壁地延伸,即只要踢脚板的厚度相同,第一和第二距离单纯在理论上就必须至少近似一样大。因此,预定义的角度偏差在理想情况下必须为零,使得第一和第二直线平行延伸。如果第一和第二直线没有平行延伸,则利用按照本发明的方法的该有利的实施方式,规定预定义的角度偏差,例如0.2至0.5度,该预定义的角度偏差也许还可能是由于墙灰泥的所存在的不平整而造成的。另一方面,较大的角度偏差会表明第一直线有错误,使得优选地重新确定该第一直线。
在按照本发明的方法的另一有利的实施方式中,第一距离对应于在第一空间点处的踢脚板的厚度。类似地,第二距离也对应于在第二空间点处的踢脚板的厚度。在此,在踢脚板的厚度相同的情况下,第一距离和第二距离通常必须一样大。通过这一点,例如也能够监控按照本发明的方法,使得计算机装置在每次撞击踢脚板时都确定相关的空间点和相关的距墙壁的距离并且对各个距离进行相互比较,其中这里可以容忍仅由于公差而造成的距离偏差,这些距离偏差例如表明踢脚板的制造公差。
在此,距离检测器可具有用于测量在相应的空间点处的距墙壁的距离的距离传感器,由此能够持久检测空间上的现实情况并且对向踢脚板或驶近极限的驶近进行持续适配。替代地,也可设想的是:对于不同的空间点,例如经由应用程序(App),在地图中单独地预先输入相关的距墙壁的距离并且借此预先输入在相应的空间点处存在的踢脚板的厚度,而且在撞击踢脚板时,距离检测器使用针对该空间点所输入的距离。在能够在该应用程序中说明踢脚板的厚度的情况下,可以实现对导航行为以及角落和边缘清洁的改善。例如能够针对每个房间单独地实现这一点。因此,能够使清洁机器人的距踢脚板的距离与现实情况准确适配。这可能还会被增强并且各个墙壁或者甚至各个墙壁部分可能会被改变或者安装在那里的踢脚板的厚底可能会被单独输入。这样,例如可能会将落地镜嵌入到地图中,并且清洁机器人会在该区域内以不同方式来导航。这样,即使没有旋转的侧刷,角落和边缘清洁也被改善。此外,借此可能会防止不断地撞击较坚固的踢脚板并且借此也可能会防止这些踢脚板的损坏,而且清洁机器人借此可能会获得更为智能的导航。
本发明所基于的总体思想还在于:说明一种清洁机器人,该清洁机器人具有撞击传感器和在运行状态下布置在该撞击传感器上方的距离检测器以及计算机装置,其中该计算机装置按照本发明被设计用于执行上述方法。经此,可以提供一种清洁机器人,该清洁机器人优选地仅通过距离检测器来被导航,并且同时实现了明显改善的清洁效果,原因在于该清洁机器人与以前的清洁机器人所能够实现的情况相比明显更好地检测在墙壁带有踢脚板的情况下存在的房间边界。
在按照本发明的清洁机器人的另一有利的实施方式中,距离检测器或至少一个距离检测器布置在该清洁机器人的顶部,例如布置在塔中,或者在该清洁机器人的前部布置在撞击传感器上方。经此可能的是:将距离检测器布置得高得使得该距离检测器检测在任何情况下在踢脚板上方的距相应的墙壁的距离,并且由此可以执行按照本发明的方法。
适宜地,撞击传感器布置在该清洁机器人的弹簧式保险杠中。经此,可以实现该清洁机器人对踢脚板的比较轻微的撞击,由此尤其是能几乎完全排除任何类型的损坏。
本发明的其它重要的特征和优点从从属权利要求、从附图并且从依据附图的附属的附图说明得到。
易于理解的是,上面所提到的并且随后还要阐述的特征不仅能以分别被说明的组合,而且能以其它组合或者单独地来应用,而不脱离本发明的保护范围。
附图说明
本发明的优选的实施例在附图中被示出并且在随后的描述中更详细地予以阐述,其中相同的附图标记涉及相同或类似或功能相同的组件。在此,分别示意性地:
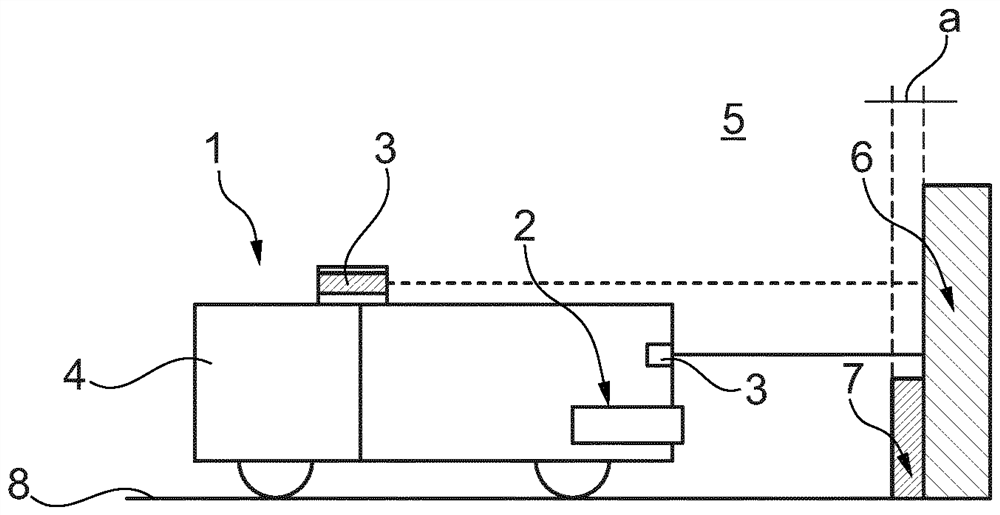
图1示出了在执行按照本发明的用于对墙壁的经改善的边缘清洁的方法时的按照本发明的清洁机器人;
图2示出了按照本发明的方法的各个方法步骤;
图3示出了如图2中那样的、但是在清洁机器人向着墙壁的另一次驶近时的图示。
具体实施方式
根据图1至图3,按照本发明的清洁机器人1至少具有撞击传感器2和在运行状态下、即在常规行驶时布置在该撞击传感器上方的距离检测器3以及计算机装置4。在此,按照图1至3所示出的清洁机器人1具有两个距离检测器3,即一个位于塔顶的距离检测器3以及一个位于前部的距离检测器。按照图1至3,还绘出了形成房间5的边界的前面布置有踢脚板7的墙壁6,其中清洁机器人1对房间5的地面8进行清洁。为了在此尤其是也能够执行对带有从墙壁6突出的踢脚板7的该墙壁的经改善的边缘清洁,提供在随后的段落中描述的、按照本发明的方法:
在按照本发明的该方法中,清洁机器人1首先被激活并且在第一次清洁行驶时撞击踢脚板7,于是撞击传感器2产生第一信号并且距离检测器3检测距墙壁6的第一距离a。按照图2和图3,用方法步骤A来表示这一点。然后,清洁机器人1继续其第一次清洁行驶,直至该清洁机器人至少又一次撞击踢脚板7为止,按照图2和图3,用方法状态C来表示这一点。在再次撞击踢脚板7时,撞击传感器2产生第二信号并且距离检测器3检测距墙壁6的第二距离a。现在,清洁机器人1的计算机装置4根据第一信号和第二信号来计算两个空间点P
利用按照本发明的方法,首次能够仅通过距离检测器3来对清洁机器人1进行导航,并且即使在墙壁6带有布置在前面的踢脚板7的情况下也能够实现这一点,其中能够同时通过考虑踢脚板7的厚度、即该距离a来实现清洁机器人1向驶近极限或踢脚板7的特别准确的驶近并且借此实现明显改善的边缘清洁。
在此,距离检测器3可具有用于测量在相应的空间点P
现在,在按照本发明的方法的一个扩展方案中,清洁机器人1继续其第一次清洁行驶,直至该清洁机器人再次撞击踢脚板7为止,于是撞击传感器2产生另一信号并且距离检测器3检测距墙壁的另一距离a。计算机装置4根据该另一信号来计算另一空间点,只要该另一空间点小于距根据第一和第二空间点P
此外,计算机装置4可以根据在至少第一和第二空间点P
按照图2和图3,这两条直线G
在按照本发明的方法中,通常情况是:在清洁机器人1与墙壁6之间的由距离检测器3所检测的距离a例如被测量或者从具有先前输入的值的地图中被读取,该距离对应于踢脚板7的厚度。因此,在相应的空间点P
利用按照本发明的方法和按照本发明的清洁机器人1,首次能够利用该清洁机器人来实现纯粹通过距离检测器3来控制的导航,同时能够在墙壁6带有踢脚板7的情况下实现经改善的边缘清洁。尤其是,不需要附加的复杂传感装置,诸如激光雷达。
附图标记清单
1 清洁机器人
2 撞击传感器
3 距离检测器
4 计算机装置
5 房间
6 墙壁
7 踢脚板
8 地面
a 距离
a
a
G
G
P 空间点
P
P
- 一种用于腔镜的镜头保护清洁器及其清洁方法
- 用于连接清洁设备的基站和用于将基站装配到墙壁的方法
- 一种用于玻璃墙壁清洁的机器人及其使用方法