一种设置在桁架下弦上的高空操作平台及其搭建方法
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及一种建筑物特殊部分用的脚手架,特别是涉及一种设置在桁架下弦上的高空操作平台及其搭建方法。
背景技术
高空作业是建筑施工过程中难以避免的一种施工过程。由于施工人员的人身安全在高空作业中受到很大的威胁,所以高空作业受到了各种各样的限制,如不能在夜间进行作业,不能连续长时间进行作业,施工人员还要披挂各种各样影响活动的安全装备,如安全绳。除此之外,高空施工与地面施工不能同时进行,以免高空施工中的坠落物砸伤地面人员。这一系列的限制导致高空作业的效率受到了严重的影响。
受限于建筑材料的强度,大跨度的单体建筑几乎只有桁架结构这么一种选择。而大跨度钢桁架结构的建筑物,一般为了有效空间利用,往往需要在桁架内设置大量机电设备与管线,并通过马道将桁架下弦连接在一起,便于设备检修。这里的马道类似桥梁施工的猫道,是一种窄桥。
而桁架结构在施工过程中,由于没有像普通建筑那样的楼板,在其被起升到安装位置后,全部的施工过程都是高空作业。其施工过程是在桁架主体结构施工完毕后,采用满堂落地脚手架的形式为高空机电施工提供作业平台。脚手架搭设时间长,空间占用大,桁架上方与下方不能同时施工,对工期影响极大。且脚手架缝隙较多,施工人员在上面行走时容易导致物品高处坠落,可能会造成安全隐患。此外,桁架结构本身也妨碍了吊装过程。
发明内容
本发明提供一种设置在桁架下弦上的高空操作平台及其搭建方法。
解决的技术问题是:桁架上的施工全程属于高空作业,依托满堂落地脚手架进行施工,不仅施工效率低下,而且影响地面上的施工。
为解决上述技术问题,本发明采用如下技术方案:一种设置在桁架下弦上的高空操作平台,包括设置在桁架下弦杆上的高空马道,所述高空马道边沿带有马道梁,所述高空操作平台还包括设置在高空马道之间、用于将高空马道之间的空隙分隔成能够铺设垫板的格子的新增平台梁;
所述高空操作平台的现有梁包括马道梁以及桁架下弦杆,所述新增平台梁与现有梁组成纵横交错的网格状结构,所述网格状结构上铺设有垫板;
所述新增平台梁的端部搭设在现有梁上并与现有梁固定连接。
进一步,所述新增平台梁的一端带有用于在搭建时防止平台梁滑落的连接扣。
进一步,所述新增平台梁为钢梁,所述连接扣为一段开口向下的槽钢,槽钢一侧与新增平台梁的端面焊接连接;所述新增平台梁带有连接扣的一端通过连接扣扣设在现有梁上,且连接扣与和其接触的现有梁焊接连接,另一端直接搭设在现有梁上并与现有梁焊接连接。
进一步,所述垫板为钢跳板,所述垫板与所述网格状结构中的网格相匹配且一一对应,每个网格中设置一块垫板,垫板边沿与网格固定连接。
进一步,所述高空操作平台下设置有之字形施工楼梯;所述高空操作平台边沿设置有护栏,所述护栏外侧设置有斜撑;所述高空操作平台上设置有用于将待安装构件从高空操作平台边沿转运到安装位置的转运装置。
进一步,所述高空操作平台上设置有照明装置。
一种高空操作平台的搭建方法,用于上述的高空操作平台的搭建,并包括以下步骤:
步骤1:搭建通向桁架下弦的临时施工楼梯以及高空马道;
步骤2:铺设用于将包括新增平台梁与垫板在内的待安装构件从高空操作平台边沿转运到安装位置的转运装置;
步骤3:将新增平台梁吊装到高空操作平台边沿,然后转运到安装位置并进行安装;
步骤4:将垫板吊装到高空操作平台边沿,然后转运到安装位置并进行安装。
进一步,步骤2分为以下分步骤:
步骤2.1:在桁架下弦上方水平设置多根穿过整个高空操作平台的溜索,各溜索相互平行;
步骤2.2:分别在每根溜索上滑动设置带有牵引绳的挂钩。
进一步,步骤3与步骤4中采用以下方法将待安装构件转运到安装位置:将一根吊绳的两端分别连接在待安装构件两端,将起重机械的挂钩勾挂在吊绳偏离中点的位置,将待安装构件吊运到溜索一端;将溜索上的挂钩勾在吊绳上,取下起重机械的挂钩,用牵引绳将待安装构件牵引到安装位置。
进一步,步骤3与步骤4中以各个临时施工楼梯为起点,向四周逐步安装待安装构件;若现场存在与桁架下弦等高的现有平台,则以各个临时施工楼梯与现有平台为起点,向四周逐步安装待安装构件。
本发明一种设置在桁架下弦上的高空操作平台及其搭建方法与现有技术相比,具有如下有益效果:
本发明中,通过新增平台梁将包括桁架下弦杆以及马道梁在内的一系列的现有梁连接为网格状结构,然后在网格状结构上铺设垫板,组成一个完整的、大面积的高空操作平台,将高空作业变成类似于室内作业那样的施工过程,极大地提升了桁架施工的安全性,并因此解决了施工人员高空作业的心理负担,明显提升了施工效率。除此之外,这种完整的大面积高空操作平台上还允许进行夜间施工;
本发明中,高空操作平台完全隔开了桁架与地面,克服了高空作业中的坠物问题,使得桁架作业与地面作业可以同时进行,明显提升了施工效率;
本发明中,高空操作平台上还可以设置二次转运的溜索,便于施工人员将待安装构件转运到所需要的位置;
本发明可在已搭建了高空马道的桁架上直接进行拓展,充分利用现有装置。
附图说明
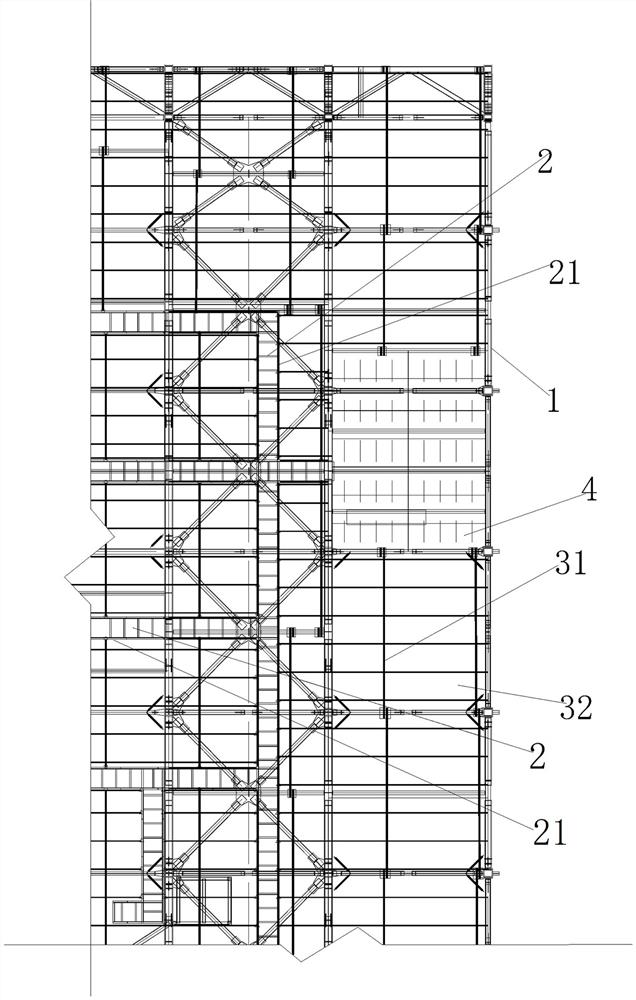
图1是本发明一种设置在桁架下弦上的高空操作平台的结构示意图图;
图2是连接扣与马道梁的连接示意图;
图3是图2中1-1剖面的剖视图;
图4是待安装构件的起吊示意图;
图5是待安装构件的转运示意图;
图6是高空操作平台拼装完毕后的效果图
其中,1-桁架下弦杆,2-高空马道,21-马道梁,31-新增平台梁,311-连接扣,32-垫板,4-现有平台,5-待安装构件,6-溜索,7-牵引绳。
具体实施方式
如图1所示,一种设置在桁架下弦上的高空操作平台,包括设置在桁架下弦杆1上的高空马道2,高空马道2边沿带有马道梁21,高空操作平台还包括设置在高空马道2之间、用于将高空马道2之间的空隙分隔成能够铺设垫板32的格子的新增平台梁31。这里高空马道2的作用有二,其一为高空操作平台搭建过程中作为踏板使用,其二为提供新增平台梁31的连接点。因为桁架下弦杆1上是不适合进行太多的焊接操作的,焊接会影响桁架下弦杆1强度,而高空马道2不会影响建筑结构。因此应尽可能的把新增平台梁31接在马道梁21上,只有在高空马道2之间间距过大,才能考虑将新增平台梁31连接在桁架下弦杆1上。
本实施例中新增平台梁31包括工字钢的主梁以及方钢管的辅梁,先搭主梁,然后在主梁上搭垂直于主梁的辅梁,二者组合成网格状,填满高空马道2之间的间隙。设置辅梁是为了减重,因为如果全部选用工字钢作为新增平台梁31,那吊装过程的工作量就太大了。如果高空马道2之间的间隙较小,那么可以只铺辅梁,直接把辅梁架在现有梁上,甚至不铺新增平台梁31,直接把垫板32铺在现有梁上。设置什么样的、多大密度的新增平台梁31,取决于能否使垫板32在铺设后不因踩踏而发生形变。
高空操作平台的现有梁包括马道梁21以及桁架下弦杆1,新增平台梁31与现有梁组成纵横交错的网格状结构,网格状结构上铺设有垫板32。
新增平台梁31的端部搭设在现有梁上并与现有梁固定连接。注意这里的新增平台梁31,一定要搭设在现有梁上,因为本发明的高空操作平台,其搭建过程同样属于高空作业,应尽可能地减少对部件的移动,理想状况是从挂钩上取下后就直接放到安装位置,而只有搭接能够满足这种需求。
新增平台梁31的一端带有用于在搭建时防止平台梁滑落的连接扣311。
如图2-3所示,新增平台梁31为钢梁,连接扣311为一段开口向下的槽钢,槽钢一侧与新增平台梁31的端面焊接连接;新增平台梁31带有连接扣311的一端通过连接扣311扣设在现有梁上,且连接扣311与和其接触的现有梁焊接连接,另一端直接搭设在现有梁上并与现有梁焊接连接。这种这种连接方式的好处在于从挂钩上卸下来之后,直接就能搭在现有梁上,且不必担心其滑落。至至于为什么另一端不设置连接扣311,是因为新增平台梁31的长度不可能刚好精确地与两根现有梁之间的间距相匹配。当然直接在直接将新增平台梁31搭在两根现有梁上,然后进行焊接也是可以的,这种方式很简便,但是有脱落的风险。此外,马道梁21一般为开口向外的槽钢,也可以在槽钢开口内预先焊接连接板,然后新增平台梁31通过连接板与马道梁21连接,这样便无需在高空进行焊接,只需拧螺母,施工难度会下降一些。此外,图2-3显示的是矩管与槽钢的连接,但这种连接方式不限于这两种型钢之间的连接,任何型钢之间均可采用这种连接方式。
垫板32为钢跳板,垫板32与网格状结构中的网格相匹配且一一对应,每个网格中设置一块垫板32,垫板32边沿与网格固定连接。实际施工中,钢跳板用扎丝绑扎到网格上即可,绑扎的时候应注意,各跳板之间应紧密连接,不留缝隙。这里垫板32的选取一定要确保一点,即踩上去之后不能发生变形,因为垫板32只有在边沿是与有刚性支撑的,中部是完全悬空的。尽量不要采用木板这样的带有不确定因素的板,有条件的话,垫板32应在使用前进行探伤。
高空操作平台下设置有之字形施工楼梯;高空操作平台边沿设置有护栏,护栏外侧设置有斜撑;高空操作平台上设置有用于将待安装构件5从高空操作平台边沿转运到安装位置的转运装置。
高空操作平台上设置有照明装置。照明装置采用600w的LED灯,间距30m设置一个。采用直径20mm的钢筋加工成的S型挂钩吊挂到桁架上,S型挂钩外套绝缘性套管以防漏电,室内安装的固定式照明灯具悬挂高度不得低于2.5m。
本发明的高空操作平台的搭建方法,包括以下步骤:
步骤1:搭建通向桁架下弦的临时施工楼梯以及高空马道2;
临时施工楼梯为之字形施工楼梯,可采用扣件式脚手架搭设,也可以采用梯笼叠合后搭建。而如果高空马道2已经建成,需要在高空马道2上进行拓展的话,可以把马道的楼梯作为临时施工楼梯;
步骤2:铺设用于将待安装构件5从高空操作平台边沿转运到安装位置的转运装置;这里的待安装构件5包括新增平台梁31、垫板32等,具体步骤如下:
步骤2.1:在桁架下弦上方水平设置多根穿过整个高空操作平台的溜索6,各溜索6相互平行;注意,这里在绑扎溜索6时,要在溜索6内垫一些衬垫物,以免被磨断或伤害绑扎位置;
步骤2.2:分别在每根溜索6上滑动设置带有牵引绳7的挂钩。
这里的转运装置搭建完成后依然有用,可保留下来,作为高空操作平台的一部分,用于桁架施工过程中转运别的构件。
步骤3:将新增平台梁31吊装到高空操作平台边沿,然后转运到安装位置并进行安装;
步骤4:将垫板32吊装到高空操作平台边沿,然后转运到安装位置并进行安装。
如图4-5所示,步骤3与步骤4中采用以下方法将待安装构件5转运到安装位置:将一根吊绳的两端分别连接在待安装构件5两端,将起重机械的挂钩勾挂在吊绳偏离中点的位置,将待安装构件5吊运到溜索6一端;将溜索6上的挂钩勾在吊绳上,取下起重机械的挂钩,用牵引绳7将待安装构件5牵引到安装位置。吊装的构件转移过程非常危险,应时刻注意。
步骤3与步骤4中以各个临时施工楼梯为起点,向四周逐步安装待安装构件5;若现场存在与桁架下弦等高的现有平台4,则以各个临时施工楼梯与现有平台4为起点,向四周逐步安装待安装构件5。
拼装完毕后,效果如图6所示。
本实施例中,由于现场已存在与桁架下弦等高的空调平台,故将空调平台作为高空操作平台的一部分,待安装构件5也可以从空调平台开始安装,靠近空调平台的新增平台梁31也可以连接到空调平台上。当然,现有平台4不限于空调平台,只要强度足够,均可利用上,以加快施工进度,以及提供新增平台梁31的连接点。
以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。