妇科腔镜微创外科手术刀
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及医疗设备技术领域,具体地说,涉及妇科腔镜微创外科手术刀。
背景技术
腹腔镜技术因为其具有创伤小,痛苦轻,恢复快的优点,近年来,得到了迅猛的发展,子宫内膜癌(EC)、宫颈癌(SCC)、卵巢癌(OC)、盆腹腔重度粘连、盆腔脓肿、失血性休克等疾病逐步采用腹腔镜手术治疗,并取得良好的效果。在使用腹腔镜手术剔除肿瘤时,需要进行绕切和积液抽吸,在切割位置调整和切除过程中,容易因为操作不当导致误切,从而引起组织损伤和失血过多,因此如何设计一种妇科腔镜微创外科手术刀,有效防止手术操作过程中的误切,减少组织损伤和失血是目前亟需解决的问题。
发明内容
为解决上述技术问题,本发明公开了妇科腔镜微创外科手术刀,通过对手术刀内压力进行实时监控,为医生操作提供指示,在切除病灶时对刀头位置采用刻度式定量调节,有效避免手术过程中的误切,减少组织损伤和失血,降低手术难度,从而减少并发症的产生;其包括:
依次连接的调节手柄、刀体和刀头,所述刀头与所述刀体滑动连接,所述调节手柄远离所述刀体的一端转动连接有刻度盘,所述刀体内设有液压传感器。
优选的,所述刀体内部设有第一容纳空间,所述刀头滑动连接于所述第一容纳空间内,所述刀头将所述第一容纳空间分割为第一腔体和第二腔体,所述第一腔体远离所述调节手柄布置,所述刀头穿设所述第一腔体,并且所述刀头尖端沿所述刀体长度方向向外延伸。
优选的,所述调节手柄包括壳体、调节部和驱动部,所述壳体与所述刀体连接,所述驱动部包括:
第三腔体,所述第三腔体开设于所述壳体内部,并且所述第三腔体与所述第二腔体连通;
第二容纳空间,所述第二容纳空间开设于所述壳体内部,并且所述第二容纳空间布置于所述第三腔体远离所述刀头的一侧;
滑块,所述滑块滑动连接于所述第二通纳空间内,并且所述滑块将所述第二容纳空间分割为第四腔体和第五腔体,所述第四腔体靠近所述第三腔体布置;
第一连通管,所述第一连通管设置于所述第三腔体和第四腔体之间,并且所述第一连通管两端分别与所述第三腔体和第四腔体连通;
滑杆,所述滑杆设置于所述第五腔体内,所述滑杆一端与所述滑块固定连接,所述滑杆另一端穿设所述壳体与所述调节部连接,所述滑杆上设置有若干螺纹;
第二连通管,所述第二连通管设置于所述壳体和刀体内部,所述第二连通管一端与所述第一腔体连通,所述第二连通管另一端与所述第五腔体连通;
调控阀,所述调控阀安装于所述第一连通管上。
优选的,所述液压传感器安装于所述刀体内部,并且所述液压传感器感应端设置于所述第三腔体内。
优选的,所述第一腔体、第二腔体、第三腔体、第四腔体、第五腔体、第一连通管和第二连通管内部均设有传动液。
优选的,所述调节部包括:
转轴,所述转轴通过固定座连接于所述壳体上,所述转轴一端与所述刻度盘连接;
蜗轮,所述蜗轮连接于所述转轴上;
蜗杆,所述蜗杆布置于所述蜗轮一侧,并且所述蜗杆与所述蜗轮啮合连接;
电机,所述电机固定连接于所述壳体上,所述电机输出端与所述蜗杆连接;
螺母座,所述螺母座连接于所述转轴另一端,所述螺母座内圈设有若干螺纹,所述螺母座与所述滑杆螺接。
优选的,所述妇科腔镜微创外科手术刀,还包括:抽液管和抽液管接头,所述抽液管设置于所述壳体和刀体内部,所述抽液管一端贯穿所述刀体端面设置,所述抽液管另一端贯穿所述壳体侧壁设置;所述抽液管接头安装于所述壳体侧壁,并且所述抽液管接头与所述抽液管连接。
优选的,所述妇科腔镜微创外科手术刀,其特征在于,还包括:控制面板、调节按钮和指示灯,所述控制面板、调节按钮和指示灯设置于所述调节手柄外侧,所述控制面板与液压传感器、调控阀、调节按钮、指示灯和电机电连接。
优选的,所述刻度盘设有环形刻度线,所述环形刻度线刻度与所述刀头移动距离对应设置。
优选的,所述控制面板控制所述指示灯的过程包括:
首先,接收所述液压传感器传输的液压信号;
然后,根据下述公式对接收到的所述液压信号进行处理;
上述公式中,β表示液压传感器检测的压力值,T表示第三腔内的温度,M表示常数,在这里取值为8.31441±0.00026J/(mol·K),V表示第三腔的体积,n表示第三腔内气体物质的量,w表示所述液压信号频率,t表示当前时刻;
接着,对处理后的所述液压信号的数据信息进行判断,确定所述指示灯的控制结果;
上述公式中,FRU表示所述控制结果,a表示所述液压传感器检测的压力值的设定范围下限,b表示所述液压传感器检测的压力值的设定范围上限,A表示所述指示灯亮起,B表示所述指示灯熄灭;
最后,所述指示灯执行所述控制结果。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
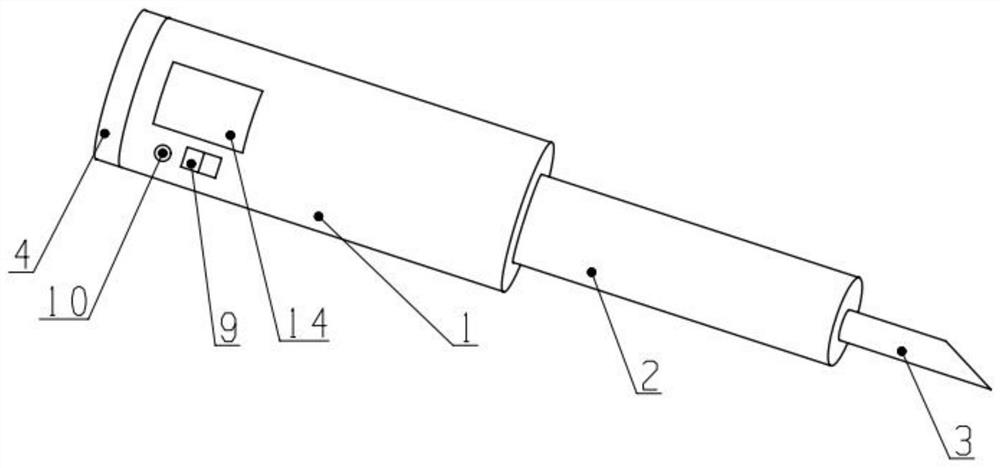
图1为本发明结构示意图;
图2为本发明结构剖视图;
图3为本发明调节部结构示意图;
图4为本发明转轴结构示意图。
图中:1.调节手柄;2.刀体;3.刀头;4.刻度盘;5.液压传感器;6.调控阀;7.抽液管;8.抽液管接头;9.调节按钮;10.指示灯;11.壳体;12.调节部;14.控制面板;21.第一腔体;41.环形刻度线;22.第二腔体;121.转轴;122.蜗轮;123.蜗杆;124.电机;125.螺母座;131.第三腔体;132.滑块;133.第四腔体;134.第五腔体;135.第一连通管;136.滑杆;137.第二连通管。
具体实施方式
下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例
下面将结合附图对本发明做进一步描述。
如图1-4所示,本实施例提供的妇科腔镜微创外科手术刀,包括:
依次连接的调节手柄1、刀体2和刀头3,所述刀头3与所述刀体2滑动连接,所述调节手柄1远离所述刀体2的一端转动连接有刻度盘4,所述刀体2内设有液压传感器5。
本发明的工作原理和有益效果为:
本发明提供妇科腔镜微创外科手术刀,使用时,医生用手握住调节手柄1,将刀体2和刀头3伸入腹腔内病灶位置,对手术刀位置进行微调,使所述刀头3与病灶接触,使第三腔体131内压力升高,液压传感器5检测压力值达到设定范围后,指示灯10点亮,对医生进行操作提示,此时,通过调节按钮9打开调控阀6,第三腔体131和第四腔体133连通,然后通过调节按钮9控制电机124正转,推动传动液运动,将所述刀头3推进至病灶切割适宜位置,关闭调控阀6,进行切除操作,推进过程中根据所述刻度盘4示数进行定量调节,病灶切除完成后,第三腔体131内压力降低,指示灯10熄灭,通过控制按钮9打开调控阀6并控制电机124反转,使所述刀头3收回,关闭调控阀6,然后将手术刀拔出。
本发明通过对手术刀内压力进行实时监控,为医生操作提供指示,在切除病灶时对刀头位置采用刻度式定量调节,有效避免手术过程中的误切,减少组织损伤和失血,降低手术难度,从而减少并发症的产生。
在一个实施例中,所述刀体2内部设有第一容纳空间,所述刀头3滑动连接于所述第一容纳空间内,所述刀头3将所述第一容纳空间分割为第一腔体21和第二腔体22,所述第一腔体21远离所述调节手柄1布置,所述刀头3穿设所述第一腔体21,并且所述刀头3尖端沿所述刀体2长度方向向外延伸。
上述技术方案的工作原理和有益效果为:
所述刀头3滑动连接于所述第一容纳空间内,传动液向所述第二腔体22充入时,所述第二腔体22空间变大,所述第一腔体21空间变小,此时将所述刀头3推出所述刀体2,所述第一腔体21内传动液通过第二连通管137排出;当传动液通过第二连通管137进入所述第一腔体21时,所述第一腔体21空间变大,所述第二腔体22空间变小,此时将所述刀头3收回。通过上述结构设计,将所述刀头3进行灵活推出,对所述刀头3位置进一步微调,实现所述刀头3对病灶的准确切除,同时在病灶切除后及时将所述刀头3收回,有效防止手术刀取出过程中对人体组织刮伤,提高手术刀使用可靠性,降低手术风险。
如图2所示,在一个实施例中,所述调节手柄1包括壳体11、调节部12和驱动部,所述壳体11与所述刀体1连接,所述驱动部包括:
第三腔体131,所述第三腔体131开设于所述壳体11内部,并且所述第三腔体131与所述第二腔体22连通;
第二容纳空间,所述第二容纳空间开设于所述壳体11内部,并且所述第二容纳空间布置于所述第三腔体131远离所述刀头3的一侧;
滑块132,所述滑块132滑动连接于所述第二通纳空间内,并且所述滑132将所述第二容纳空间分割为第四腔体133和第五腔体134,所述第四腔体133靠近所述第三腔体131布置;
第一连通管135,所述第一连通管135设置于所述第三腔体131和第四腔体133之间,并且所述第一连通管135两端分别与所述第三腔体131和第四腔体133连通;
滑杆136,所述滑杆136设置于所述第五腔体134内,所述滑杆136一端与所述滑块132固定连接,所述滑杆136另一端穿设所述壳体11与所述调节部12连接,所述滑杆136上设置有若干螺纹;
第二连通管137,所述第二连通管137设置于所述壳体11和刀体2内部,所述第二连通管137一端与所述第一腔体21连通,所述第二连通管137另一端与所述第五腔体134连通;
调控阀6,所述调控阀6安装于所述第一连通管135上。
上述技术方案的工作原理和有益效果为:
所述壳体11与所述刀体1连接,所述刀头3的推出和收回通过驱动部控制,当控制所述刀头3推出时,通过调节部12驱动所述滑杆136带动所述滑块132向所述刀头3方向移动,所述第四腔体133内的传动液在所述滑块132的作用下,向所述第三腔体131和第二腔体22内流动,从而将所述刀头3推出,所述第一腔体31内的传动液在刀头作用下沿所述第二连通管137流出,并且流入所述第五腔体134内;当控制所述刀头3收回时,传动液流通方向相反,所述滑杆136与所述壳体11连接处密封设置;所述调控阀6安装于所述第一连通管135上,对所述第一连通管135的开闭状态调节,所述调控阀6开启时,传动液在各腔体之间连通,所述调控阀6关闭时,传动液不流动。通过上述结构设计,在各个腔体之间形成闭合回路,利用传动液的流动实现刀头3的推出和收回,提高刀头3的调节稳定性,有效固定刀头3,有效防止手术操作过程中刀头发生移位,实现病灶的准确切除。
在一个实施例中,所述液压传感器5安装于所述刀体2内部,并且所述液压传感器5感应端设置于所述第三腔体131内。
上述技术方案的工作原理和有益效果为:
当刀头3与病灶组织接触和切除操作时,刀头3所受压力增大,所述第三腔体131内传动液压力随之增大,所述液压传感器5实现了对所述第三腔体131内的传动液压力的实时检测,从而对监控刀头3与病灶的接触状态进行监控。
在一个实施例中,所述第一腔体21、第二腔体22、第三腔体131、第四腔体133、第五腔体134、第一连通管135和第二连通管137内部均设有传动液。
上述技术方案的工作原理和有益效果为:
传动液是所述手术刀的动力传递介质,位于各腔体和其连接管道内,不易被压缩,同时传动液具备润滑功能,可以润滑每个接触的表面或组件,在较大压力波动以及长期储存的情况下仍能保持特性,具有低挥发性和无毒性,提高手术刀的可靠性,延长使用寿命。
如图3、4所示,在一个实施例中,所述调节部12包括:
转轴121,所述转轴121通过固定座连接于所述壳体11上,所述转轴121一端与所述刻度盘4连接;
蜗轮122,所述蜗轮122连接于所述转轴121上;
蜗杆123,所述蜗杆123布置于所述蜗轮122一侧,并且所述蜗杆123与所述蜗轮122啮合连接;
电机124,所述电机124固定连接于所述壳体11上,所述电机124输出端与所述蜗杆123连接;
螺母座125,所述螺母座125连接于所述转轴121另一端,所述螺母座125内圈设有若干螺纹,所述螺母座125与所述滑杆136螺接。
上述技术方案的工作原理和有益效果为:
启动所述电机124驱动所述蜗杆123转动,所述蜗杆123带动所述蜗轮122转动,所述刻度盘4、螺母座125与所述蜗轮122同轴设置,因此所述刻度盘4、螺母座125与所述蜗轮122同步转动,所述螺母座125内圈与所述滑杆136螺接,从而驱动所述滑杆136移动,所述滑杆136与滑块132同步动作,所述刻度盘4转动时与壳体11形成相对转角。通过上述结构设计,实现所述滑杆136的电动控制,根据所述刻度盘4的示数进行定量调节,从而控制刀头3的小幅移动,避免手术过程中手动进刀产生的误切,有效适应微小尺寸病灶,降低手术操作难度。
在一个实施例中,所述的妇科腔镜微创外科手术刀还包括:抽液管7和抽液管接头8,所述抽液管7设置于所述壳体11和刀体2内部,所述抽液管7一端贯穿所述刀体2端面设置,所述抽液管7另一端贯穿所述壳体11侧壁设置;所述抽液管接头8安装于所述壳体11侧壁,并且所述抽液管接头8与所述抽液管7连接。
上述技术方案的工作原理和有益效果为:
手术操作过程中,通过腹腔镜观察腹腔状态,当腹腔镜内出现血水时,将将所述抽液管7在所述刀体2端面的开口位置侵入到血水中,将所述抽液管接头8与负压引流袋连接,在负压作用下,血水通过所述抽液管7进入负压引流袋,对血水进行收集,也可以将所述抽液管接头8与针头连接,通过针管抽吸血水。通过上述结构设计,有效去除手术过程中的血水,为手术提供良好的操作环境,保证腹腔镜视野清晰,确保手术操作稳定进行。
在一个实施例中,所述的妇科腔镜微创外科手术刀还包括:控制面板14、调节按钮9和指示灯10,所述控制面板14、调节按钮9和指示灯10设置于所述调节手柄1外侧,所述控制面板14与液压传感器5、调控阀6、调节按钮9、指示灯10和电机124电连接。
上述技术方案的工作原理和有益效果为:
所述控制面板14与调节按钮9连接,根据人为操作对手术刀进行控制,所述控制面板14与所述电机124连接,控制所述电机124的正转和反转,同时控制所述调控阀6的打开和关闭,所述控制面板14与所述液压传感器5和指示灯10连接,根据液压传感器5检测结果实现指示灯10的点亮和熄灭。通过上述结构设计,在手术过程中为医生提供直观的操控提示,医生通过操控所述调节按钮9直接控制刀头3的推出和收回,从而进行病灶切除操作,降低操作难度,提高手术刀使用便捷性。
在一个实施例中,所述刻度盘4设有环形刻度线41,所述环形刻度线41刻度与所述刀头3移动距离对应设置。
上述技术方案的工作原理和有益效果为:
所述刻度盘4与所述刀头3同步动作,当所述刀头3前后移动时,所述刻度盘4相应转动,所述壳体11上设有固定刻度线,因此将所述刻度盘4上的环形刻度线41对应所述刀头3移动距离设置,直观反应所述刀头3的移动距离,便于医生操作时确定所述刀头3与病灶的距离,为所述刀头3移动提供衡量基准,实现所述刀头3移动距离的定量调节,有效防止所述刀头3伸出量不够或伸出量过多导致误切,降低手术刀使用难度。
在一个实施例中,所述控制面板14控制所述指示灯10的过程包括:
首先,接收所述液压传感器5传输的液压信号;
然后,根据下述公式对接收到的所述液压信号进行处理;
上述公式中,β表示液压传感器检测的压力值,T表示第三腔内的温度,M表示常数,在这里取值为8.31441±0.00026J/(mol·K),V表示第三腔的体积,n表示第三腔内气体物质的量,w表示所述液压信号频率,t表示当前时刻;
接着,对处理后的所述液压信号的数据信息进行判断,确定所述指示灯10的控制结果;
上述公式中,FRU表示所述控制结果,a表示所述液压传感器检测的压力值的设定范围下限,b表示所述液压传感器检测的压力值的设定范围上限,A表示所述指示灯亮起,B表示所述指示灯熄灭;
最后,所述指示灯10执行所述控制结果。
有益效果:上述技术方案,所述控制面板根据所述液压传感器检测的压力值控制指示灯亮起和熄灭,通过指示灯的亮起和熄灭对医生进行操作提示,从而避免手术过程出现操作错误,此外在对接收到的所述液压信号进行处理的过程中考虑到传递所述液压信号的频率,使得接收到的液压传感器检测的压力值更加准确,而且对处理后的所述液压信号的数据信息进行判断时,结合液压传感器检测的压力值的设定范围下限和液压传感器检测的压力值的设定范围上限,灵敏度极高。
显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
- 妇科腔镜微创外科手术刀
- 一种妇科腔镜微创外科手术刀