一种串并行共存状态下的工步可执行判断方法
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及一种串并行共存状态下的工步可执行判断方法,主要适用于在信息化环境下对复杂串并行状态制造/装配指令中指定某条工步进行可执行判断。
背景技术
制造/装配指令(以下简称指令)是由工艺部门编制的生产性工艺文件,用于指导现场工人按照指令内容完成所要求的工作任务,其最小可执行单元为工步。不同工步所属的工序不同,一般情况下,同一工序下的工步为串行执行,即完成自然上级工步才可执行本工步。有些情况下,不同工序可以同步开始,即为并行工序,每个工序对应的首个工步我们称之为并行开始工步,并行开始工步的实际上一个工步完成后可执行所属的任意并行开始工步,所有的并行工步结束后才可执行后续的工序内容。
在飞机装配过程中,装配周期较长,大部分装配指令中涵盖多种工序,为提高装配效率,缩短周期,工艺技术人员将部分工序设计为并行工序,这就导致装配指令中往往同时存在串行工步、并行工步。由于工序多,一般涉及的工步数量也比较多,因此,在实际生产过程中,工人在执行某个工步前,往往需要先通过MES系统判断当前工步是否可以执行,信息系统中一般是按照自然顺序储存工序的顺序,如工步50需要工步20,工步40同时执行完后才可以执行,但默认系统中存储的上级工步为其自然顺序的上一级工步40,并非实际上级工步20和工步40(为便于区分,文中将实际的上一级工步称为上级工步,系统中按自然顺序存储的工序为自然上级工步)。在串并行工步共存的情况下,尤其是存在大量并行工步情况下,工艺技术人员需要在MES系统中作出大量的注释,以准确标注出其实际的上级工步,同时也将工步开工的判断逻辑变得极为复杂,为保证系统功能的稳定性,在系统设计中往往未对此类情况进行精确控制。该功能的缺失极易造成工人未按要求执行当前工步,对产品造成不可逆的影响。因此,如何准确判断当前工步的可执行状态已是现场精细化管理的重点和难点。
判断当前工步可执行状态的关键在于明确该工步与上级工步的关系。若仅有一个实际上级工步时,则直接判断上级工步执行状态即可;若上级工步存在多个便要准确判断出所有上级工步的执行状态。在编制指令过程中,工艺人员不能可能针对每个工步填写其串并行关系,这样将极大地增加指令的编制时间。尽可能减少维护的信息,同时保证能够准确计算出所有的串并行关系将是重点研究的内容。
发明内容
为了解决这一问题,本申请的目的在于,利用结构化的工步信息,以及合理的逻辑判断,实现串并行共存状态下的工步可执行状态判断。该方法仅需工艺技术人员标注出指令中所有并行工序的首末工步,便可利用串行工步、并行工步的执行逻辑规则,推算出当前工步的可执行状态,计算简单,可靠,特别适用于各种复杂串并行状态下当前工步可执行情况判断。
本申请解决其技术问题所采用的技术方案为:
一种串并行共存状态下的工步可执行判断方法,包括如下步骤:
步骤一:生成并行工步表,具体过程为:工艺技术人员在编制制造/装配指令时,若存在并行工序时,抽取并行工序的首末工步及其相关的并行工序首末工步记录为并行工步表P
步骤二:判断自然上级工步是否为空,具体过程如下:
1输入当前工步N,判断N的可执行状态;
2若当前工步N的自然上级工步F
步骤三:获取最小并行工步的自然上级工步,并判断其是否已执行完毕。具体过程为:若N∈{S
步骤四:获取所有并行工步,并判断其是否已执行完毕,具体过程为:若F
步骤五:判断其自然上级工步是否已执行完毕,具体过程为:若
本发明的优点是,通过工艺人员编制制造/装配指令时,根据填入的信息,对工步进行结构化处理,生成平行工步表,并基于平行工步表,准确找出各种情况下所必须判断的工步,最大程度上避免了重复遍历查询,提高了整体运算效率,越是复杂的情况,越能体现出该方法的优势。
附图说明
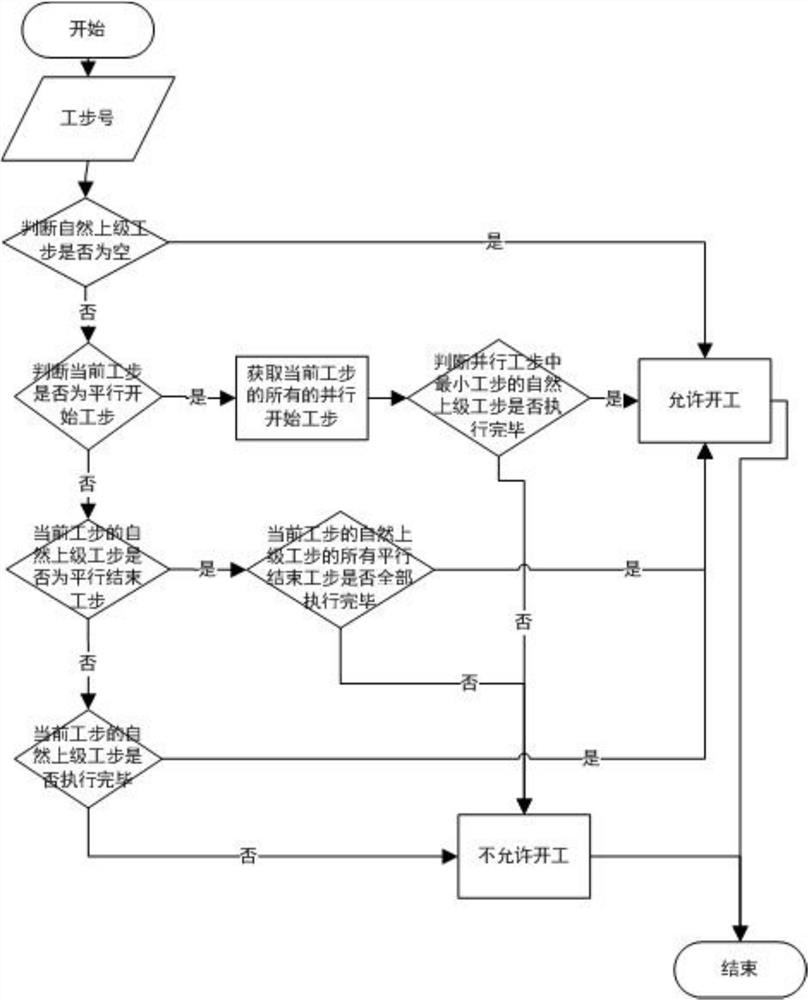
图1判断方法流程图
具体实施方式
如图1所示,一种串并行共存状态下的工步可执行判断方法,包括如下步骤:
步骤一:生成并行工步表,具体过程为:工艺技术人员在编制制造/装配指令时,若存在并行工序时,抽取并行工序的首末工步及其相关的并行工序首末工步记录为并行工步表P
步骤二:判断自然上级工步是否为空,具体过程如下:
1输入当前工步N,判断N的可执行状态;
2若当前工步N的自然上级工步F
步骤三:获取最小并行工步的自然上级工步,并判断其是否已执行完毕,具体过程为:若N∈{S
步骤四:获取所有并行工步,并判断其是否已执行完毕,具体过程为:若F
步骤五:判断其自然上级工步是否已执行完毕,具体过程为:若
具体执行时
方式1:
(1)有一份装配指令,从10-90,每10为一个工步,其中20至40为一个工序,50至60为一个工序,70至80为一个工序,这三个工序互为并行工序,工步10为初始工步,工步90为终止工步。
并行工序表记录有2条,分别为:P
(2)输入当前工步90,判断当前工步90的可执行状态。
(3)若当前工步90的自然上级工步为80,不为空,不为空则按下述内容继续判断。
(4)
(5)自然上级工步为80,80∈{60,80},则需计算出并行工步关联集合Q’。首先自下而上计算其过渡集合AQ’={20,70},其次找到并行工步集合BQ’={20,70,50},在自下而上找到工步90的所有父级工步Q’={40,80,60},若工步40、60、80均已完成,则工步90可执行,若任一未完成,则工步90不可执行。
方式2:
(1)有一份装配指令,从10-90,每10为一个工步,其中20至40为一个工序,50至60为一个工序,70至80为一个工序,这三个工序互为并行工序,工步10为初始工步,工步90为终止工步。
并行工序表记录有2条,分别为:P
(2)输入当前工步50,判断当前工步50的可执行状态。
(3)当前工步50的自然上级工步为40,不为空,则按下述内容继续判断。
(4)50∈{20,20}∪{50,70},则找到并行工步关联集合为Q,先自下而上计算其过渡集合AQ={20,50},在自下而上找到N的所有并行工步Q={20,50,70},最后取最小并行工步min Q=20的自然上级工步10,若工步10已执行完毕,则当前工步可执行,否则工步50不可执行。
- 一种串并行共存状态下的工步可执行判断方法
- 一种数控机床切削工步全过程中关键时刻的判断方法