一种高速公路无人驾驶交警车辆机器人系统
文献发布时间:2023-06-19 09:44:49
技术领域
本发明属于道路交通技术领域,具体涉及一种无人驾驶交警车辆机器人系统。
背景技术
随着人们生活水平的提高,国内汽车保有量越来越大,人们自驾出行需求激增,但是随之而来的交通事故发生概率增加,特别是高速公路事故频发。
据公安部和国家统计局数据,2018年全国机动车保有量已达3.27亿辆,驾驶人达4.09亿人。公路通车达到486万公里,交通事故发生约交通事故20.3万起,死亡人数为6.3万人,造成直接财产损失为约12亿元。高速公路通车里程14.26万公里,占比2.9%,根据统计,高速公路发生概率是普通公路的4倍,死亡率高达34%以上,高速事故总死亡人数占比超10%容小觑。
研究表明,高速公路交通事故主要原因是超速、疲劳驾驶、违规占用应急车道、违规便道、未保持安全车距、爆胎。由于当前流动监测不足,固定摄像头无法全覆盖,导致高速违规屡禁不止。
本发明一种高速公路无人驾驶交警车辆机器人系统,通过多传感器融合无人驾驶技术,配合电动车辆无线充电,可实现7x24h无人实时巡逻执勤。通过车载摄像头流动监控车辆与道路运行情况,同步运用车联网技术,将车辆与远端监控中心连接具备拥堵引导、违章实时处理,同时车载人机交互模块有效进行法规宣传。有效震慑违规行为降低高速公路事故发生率,同时提高人们交通安全意识。
发明内容
针对现有技术存在的问题,本发明的两方面提供了一种高速公路无人驾驶交警车辆机器人系统和一种高速公路无人驾驶交警车辆机器人方法。
本发明的目的是通过以下技术方案实现的。
根据本发明的第一方面的高速公路无人驾驶交警车辆机器人方法,包括:
S1、路线规划:设定高速公路巡逻路径或临时事故点;规划交警车辆驾驶
路线与驾驶态势和驾驶目标路线,生成控制指令;
S2、自动行驶:生成一次路线规划,获取交警车辆周围信息,识别路侧设备和障碍物;生成驾驶态势图和二次路线规划,结合路径跟踪和控制算法生成控制指令;根据所述控制指令执行自动行驶;
S3、无线充电和电量管理:获取交警车辆当前电量M%,当电量M%低于P%时执行以下步骤;结合电量统计和路径规划,计算是否可行驶到充电点;如果电量大于行驶到充电点所需电量,则行驶到充电点后进行无线充电;如果电量小于行驶到充电点所需电量,则在时间T内停至应急车道,并上报电量、车身情况和车辆位置;
S4、巡逻取证:对高速公路进行摄像;处理拍摄的视频信息,用卡尔曼滤波算法进行目标物体提取;将提取出的目标物体和库中违法信息进行特征比对;判断是否违法,如果是则保存视频作为取证;
S5、人机交互:设置宣传用语进行安全宣导和提醒;在违章处理或者远程救援时进行远程通话;输入和输出事故信息;读取身份证信息;采样人脸信息和证件信息;
S6、远程监控:实时查看交警车辆四周环境信息,获取周围车辆报警与诊断信息,通过人机交互处理远端和本地的执法。
按上述方案,所述步骤S3中电量M%和P%的范围都为0~100%,所述P的值可人为设置;所述时间T为正整数,T的值可人为设置。
按上述方案,所述步骤S3判断步骤具体为:
S31、通过步骤S1计算行驶至距离交警车辆最近的充电点所需要的电量N%;
S32、如果P>M>N,则证明交警车辆能够在电量耗尽前行驶至最近充点电,行驶至最近充点电后进行无线充电;如果P>N>M,则证明交警车辆不能够在电量耗尽前行驶至最近充点电,靠边行驶至应急车道,并将电量、车身情况和车辆位置上报至云端。
按上述方案,所述步骤S6具体为:
S61、对交警车辆四周进行全景摄像,将拍摄到的视频进行编码处理并传送至云端;
S62、获取周围车辆的故障诊断和报警信息,向云端报警;
S63、分析视频信息和报警信息;
S64、通过云端远程监控中心通过人机交互进行远程互动交流。
根据本发明的第二方面的高速公路无人驾驶交警车辆机器人系统,包括:
路线规划模块:用于设定高速公路巡逻路径或临时事故点,并规划交警车辆驾驶路线与驾驶态势和驾驶目标路线,生成控制指令;
自动行驶模块:用于生成一次路线规划,获取交警车辆周围信息,识别路侧设备和障碍物;然后生成驾驶态势图和二次路线规划,结合路径跟踪和控制算法生成控制指令并根据所述控制指令执行自动行驶;
无线充电和电量管理模块:用于在获取到交警车辆当前电量M%低于P%时,结合电量统计和路径规划计算是否可行驶到充电点;如果可行驶到充电点,则行驶到充电点后进行无线充电;如果不可行驶到充电点,则在时间T内停至应急车道,并上报电量、车身情况和车辆位置;
巡逻取证模块:用于实时监控和抓拍车辆违法行为、自动驾驶时对高速公路进行摄像、处理拍摄的视频信息并用卡尔曼滤波算法进行目标物体提取、将提取出的目标物体和库中违法信息进行特征比对;最后判断是否违法,如果是则保存视频作为取证;
人机交互模块:用于设置宣传用语进行安全宣导和提醒;在违章处理或者远程救援时进行远程通话;输入和输出事故信息;读取身份证信息;采样人脸信息和证件信息;
远程监控模块:用于实时查看交警车辆四周环境信息,获取周围车辆报警与诊断信息,通过人机交互模块处理远端和本地的执法。
可选的,所述无线充电和电量管理模块中M%和P%的范围都为0~100%,所述P的值可人为设置;所述时间T为正整数,所述T的值可人为设置。
可选的,所述无线充电和电量管理模块具体包括:
计算单元:用于计算行驶至距离交警车辆最近的充电点所需要的电量N%;
决策单元:用于当P>M>N时,行驶至最近充点电后进行无线充电;当P>N>M时,靠边行驶至应急车道,并将电量、车身情况和车辆位置上报至云端。
可选的,所述远程监控模块具体包括:
摄像单元:用于对交警车辆四周进行全景摄像,将拍摄到的视频进行编码处理并传送至云端;
报警单元:用于获取周围车辆的故障诊断和报警信息,向云端报警;
分析单元:用于分析视频信息和报警信息;
远程执法单元:用于通过云端远程监控中心按照人机交互模块进行远程互动交流。
根据以上两方面,本发明能解决无人机巡逻续航能力不足、警示宣传不够、无事故处理能力好交通引导能力不足等弊端,同时弥补了固定监控摄像头监控范围小的缺陷,能够无有效替代人力巡逻,就近处理交通事故节省人力。
附图说明
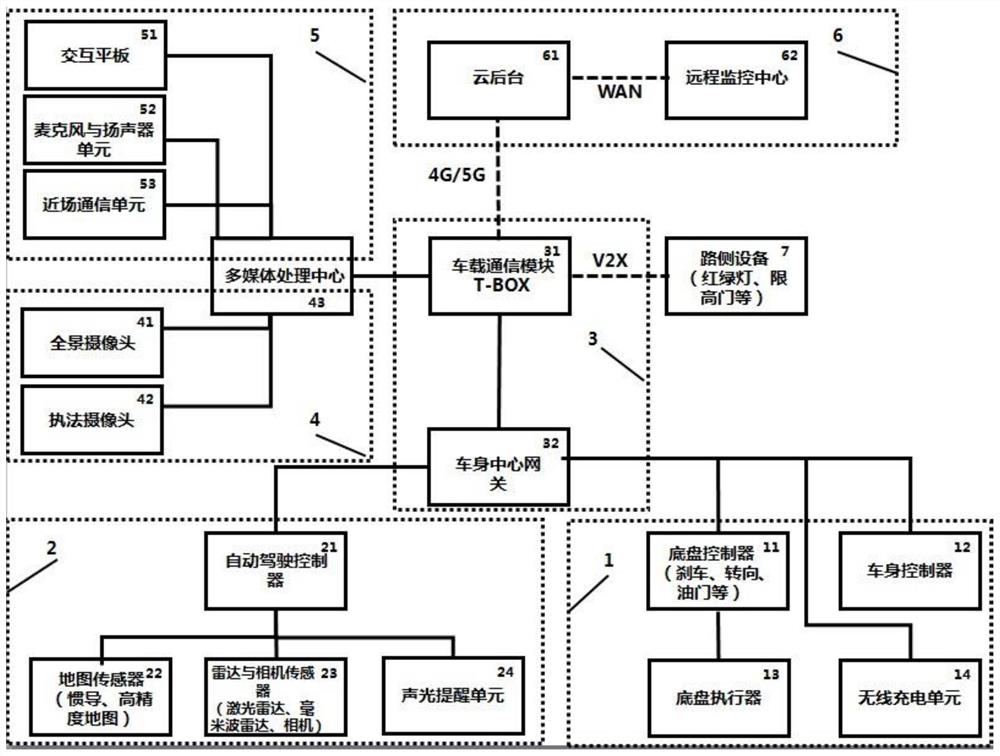
图1是本发明一种高速公路无人驾驶交警车辆机器人系统的系统结构示意图。
图2是本发明一种高速公路无人驾驶交警车辆机器人方法的路线规划步骤流程图。
图3是本发明一种高速公路无人驾驶交警车辆机器人方法的自动行驶步骤流程图。
图4是本发明一种高速公路无人驾驶交警车辆机器人方法的无限充电和电量管理步骤流程图。
图5是本发明一种高速公路无人驾驶交警车辆机器人方法的巡逻取证步骤流程图。
图6是本发明一种高速公路无人驾驶交警车辆机器人方法的人机交互和远程监控步骤流程图。
具体实施方式
为能进一步了解本发明的发明内容、特点及功效,兹列举以下实施例,并配合附图详细说明如下。
下面结合附图对本发明的结构作详细的描述。
如图1所示,本发明实施例,包括车身通信模块和分别与车身通信模块通信连接的车身底盘模块、自动驾驶模块、车载监控与执法模块、人机交互模块和远程监控模块。
所述车身底盘模块用于控制车辆的转向、刹车、加速、灯光和无线充电;
所述自动驾驶模块根据云端设定的巡逻线路,通过各个传感器与人工智能的计算,用于自动进行路径选择和车身控制,同时诊断车身故障;
所述车身通信模块用于数据传输与转发;
所述车载监控与执法模块用于实时监控和抓拍车辆违法行为;
所述人机交互模块用于与本地人员远程交流和读取身份信息;
所述远程监控模块通过4G或5G与车身通信模块通信,用于监控车辆运行状态和车辆周边信息。
按上述方案,所述车身底盘模块具体包括底盘控制器、车身控制器、底盘执行器和无线充电单元;所述底盘控制器与底盘执行器连接;
所述车身控制器用于获取车辆报警与信息诊断;所述底盘控制器和底盘执行器用于执行车辆的自动驾驶;所述无线充电单元用于在车辆充电点给车辆充电。
按上述方案,所述自动驾驶模块具体包括自动驾驶控制器、地图传感器、雷达与相机传感器和声光提醒单元;所述自动驾驶控制器分别与地图传感器、雷达与相机传感器和声光提醒单元连接;
所述地图传感器包括惯导和高精度地图;所述雷达与相机传感器包括激光雷达、毫米波雷达、单目相机和双目相机;所述自动驾驶控制器用于结合地图传感器和传感器的信息自动规划动态运行路径,还用于获取车辆报警与诊断信息;所述声光提醒单元模块为设在车辆前后的扬声器,用于安全宣导和提醒。
按上述方案,所述车身通信模块具体包括车载通信模块T-BOX和车身中心网关;所述车载通信模块T-BOX和车身中心网关连接;所述车身中心网关分别连接底盘控制器、车身控制器、无线充电单元和自动驾驶控制器。
按上述方案,所述车载监控与执法模块具体包括全景摄像头、执法摄像头和多媒体处理中心;所述多媒体处理中心分别与所述全景摄像头、执法摄像头和车载通信模块T-BOX连接;
所述全景摄像头用于实时查看车辆四周环境信息和人脸采样;所述执法摄像头用于抓拍车辆违法行为。
按上述方案,所述人机交互模块具体包括交互平板、麦克风与扬声器单元和近场通信单元;所述交互平板、麦克风与扬声器单元和近场通信单元分别与所述多媒体处理中心连接;
所述交互平板为显示屏,用于输入和输出相关事故信息;麦克风与扬声器单元用于在违章处理或者远程救援时进行远程通话;近场通信单元可以读取身份信息。
按上述方案,所述远程监控模块具体包括云后台和远程监控中心;所述云后台和远程监控中心连接,所述云后台和所述车载通信模块T-BOX通过4G或5G网络连接;
所述远程监控中心用于设定高速公路巡逻路径或临时事故点。
图2至图6为本发明实施例提供的一种高速公路无人驾驶交警车辆机器人方法另一个实施例步骤流程图,具体实现过程如下:
图2为本发明一种高速公路无人驾驶交警车辆机器人方法的路线规划步骤流程图,该方法包括:通过远程监控中心进行高速公路巡逻路径设定或者临时事故点设定,云后台通过4G/5G将设定下发到车辆机器人车载通信模块T-BOX端,车身中心网关将接收到车载通信模块T-BOX的控制信息转发到CAN总线再转发到自动驾驶控制器,自动驾驶控制器会结合地图传感器的惯性导航系统和高精度地图以及雷达相机传感器融合的信息自动规划动态运行路径,车身控制决策模块进行运算输出车身控制指令,交由底盘控制器及其底盘执行器执行。
图3是本发明一种高速公路无人驾驶交警车辆机器人方法的自动行驶步骤流程图,该方法包括:分为感知与融合、决策与控制、车辆执行三个部分。感知与融合步骤具体为根据地图传感器的惯性导航系统和高精度地图生成一次路线规划,同时融合雷达相机传感器的激光雷达、毫米波雷达和相机的信息,再结合车载通信模块T-BOX的V2X识别其他物体,生成驾驶态势图和二次路线规划,结合路径跟踪和控制算法生成对应的控制指令,通过车身中心网关发送给车身控制器和底盘控制器进行决策,再由底盘控制器和底盘执行器,实现自动行驶;
图4是本发明一种高速公路无人驾驶交警车辆机器人方法的无限充电和电量管理步骤流程图,该方法包括:车身控制器获取电量并上送CAN总线,再上报给自动驾驶控制器,自动驾驶控制器结合电量统计和路径规划,计算是否能够行驶到充电点,如果能够达到则正常运行,达到充电点后利用无线充电单元对车辆进行充电,如果电量快耗尽不能够达到充点电,则在自动驾驶系统关机前时间T内靠边停至应急车道,并上报电量、车辆情况和车辆位置,所述时间T可以人为设置。
图5是本发明一种高速公路无人驾驶交警车辆机器人方法的巡逻取证步骤流程图,该方法包括:执法摄像头对目标物体进行拍摄,多媒体处理中心通过卡尔曼滤波算法对目标物体进行提取,再进行特征比对,对超速、占用应急车道、未保持安全车距、违停等违法行为进行识别取证。
图6是本发明一种高速公路无人驾驶交警车辆机器人方法的人机交互和远程监控步骤流程图,该方法包括:中心监控系统通过车载通讯系统,实时通过全景摄像头查看车辆四周环境信息,通过自动驾驶控制器、底盘控制器和车身控制器获取车辆报警与诊断信息,通过人机交互系统处理远端和本地的执法。所述人机交互通过声光提醒单元的前后扬声器在车辆行驶过程中进行安全宣导和提醒,宣导和提醒用于可以根据意愿人为设置,麦克风和对讲器用来在违章处理或者远程救援时与相关人员进行远程通话,交互平板用来进行相关事故过程中进行信息输入和输出,近场通讯模块用于读取身份证信息,摄像头用来进行人脸采样,方便进行证件校验。
以上所述仅是对本发明的较佳实施例而已,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所做的任何简单修改,等同变化与修饰,均属于本发明技术方案的范围内。
- 一种高速公路无人驾驶交警车辆机器人系统
- 一种面向无人驾驶车辆的交警指挥手势动态识别考核系统