一种六轴十二翼侦测及预警消防无人机
文献发布时间:2023-06-19 10:13:22
技术领域
本发明属于无人机侦测及预警消防技术领域,具体涉及一种六轴十二翼侦测及预警消防无人机。
背景技术
无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机;随着社会的不断发展,无人机的应用领域越来越多,尤其是以消防为主的领域,可以运用无人机来代替部分人力行动、侦测火情,以便根据火情来制定一些救援方案。
目前,无人机在侦测火情时,由于温度较高、热浪较大、火源迸出的燃烧物和碎片较多、环境复杂易致撞到障碍物情况,对稳定飞行、保证飞行器本身的安全造成极大的挑战;在复杂的火场中无人机的螺旋桨极易受到损坏,而此时无人机只能被迫返航甚至直接坠落。
因此,针对上述问题,本发明提供了一种六轴十二翼侦测及预警消防无人机,通过在六轴十二翼无人机机体上安装数据采集模块和数据处理模块和数据通信模块,实现灾情现场温湿度、烟雾浓度、有害气体的实时监测,提高了消防救援人员对现场火灾信息的准确了解,另外通过在六轴十二翼无人机的浆座与螺旋桨之间的连接处安装断桨保护机构,当螺旋桨损坏时,断桨保护机构启动,将故障螺旋浆进行自动抛出,从而保证多旋翼无人机任务的正常进行。
发明内容
本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种六轴十二翼侦测及预警消防无人机,其结构简单,设计合理,通过在六轴十二翼无人机机体上安装数据采集模块和数据处理模块和数据通信模块,实现灾情现场温湿度、烟雾浓度、有害气体的实时监测,提高了消防救援人员对现场火灾信息的准确了解,另外通过在六轴十二翼无人机的浆座与螺旋桨之间的连接处安装断桨保护机构,当螺旋桨损坏时,断桨保护机构启动,将故障螺旋浆进行自动抛出,从而保证多旋翼无人机任务的正常进行。
为解决上述技术问题,本发明采用的技术方案是:一种六轴十二翼侦测及预警消防无人机,包括六轴十二翼无人机的机体和六个机臂,机臂上设置有螺旋桨机构,其特征在于:所述六轴十二翼无人机的机体上设置有监控模块,所述监控模块包括依次连接的数据采集模块、数据处理模块和数据通信模块;
所述螺旋桨机构包括机座和两个对称设置在机座上下两侧的浆座,所述浆座和螺旋桨之间设置有断桨保护机构,所述断桨保护机构包括设置在浆座上的方型卡、设置所述方型卡上的第一硅钢片和设置在螺旋桨上且与第一硅钢片配合的第二硅钢片,第一硅钢片通过电池供电,电池给第一硅钢片供电的回路中串联有继电器;
所述数据处理模块和功率检测仪设置在所述六轴十二翼无人机中收纳仓内,数据处理模块包括电子线路板,所述电子线路板上集成有微控制器,功率检测仪与微控制器连接,继电器由微控制器控制。
上述的一种六轴十二翼侦测及预警消防无人机,其特征在于:所述数据采集装置包括传感器组、3D激光雷达、红外热成像仪、高清摄像头,所述传感器组安装在仓室上,所述传感器组包括温度传感器、湿度传感器、气体传感器和粉尘传感器,所述温度传感器、湿度传感器、气体传感器和粉尘传感器的输出端均与所述微控制器的输入端连接;
所述高清摄像头安装在六轴十二翼无人机机体底部,所述红外热成像仪和激光雷达均安装于六轴十二翼无人机机体前端,所述3D激光雷达、红外热成像仪、高清摄像头的输出端均与所述微控制器的输入端连接。
上述的一种六轴十二翼侦测及预警消防无人机,其特征在于:所述数据处理模块还包括与所述微控制器连接的照明灯;
所述数据通信模块安装于六轴十二翼无人机机体后端,所述六轴十二翼无人机机体上设置有天线,所述天线和数据通信模块连接;
所述照明灯安装于六轴十二翼无人机机体底部,所述收纳仓位于六轴十二翼无人机机体顶部。
上述的一种六轴十二翼侦测及预警消防无人机,其特征在于:所述六轴十二翼无人机机体上设置有太阳能电池板,所述太阳能电池板位于六轴十二翼无人机机体顶部,所述电池置于所述收纳仓内,所述太阳能电池板的输出端通过太阳能控制器为电池充电。
上述的一种六轴十二翼侦测及预警消防无人机,其特征在于:所述浆座通过电机安装在机座上。
本发明与现有技术相比具有以下优点:
1、本发明设置数据采集模块、数据处理模块、数据通信模块,将数据集模块、数据处理模块、数据通信模块安装在六轴十二翼无人机机体上,实现灾情现场温湿度、烟雾浓度、有害气体的实时监测,提高了消防救援人员对现场火灾信息的准确了解。
2、本发明设置断桨保护机构,通过在六轴十二翼无人机的浆座与螺旋桨之间的连接处安装硅钢片,然后给硅钢片通电,利用电磁的原理吸住螺旋桨旋转,当螺旋桨损坏时,断桨保护机构启动,将故障螺旋浆进行自动抛出,从而保证六轴十二翼无人机任务的正常进行。
综上所述,本发明装置简单,设计合理,结构简单,设计合理,通过在六轴十二翼无人机机体上安装数据采集模块和数据处理模块和数据通信模块,实现灾情现场温湿度、烟雾浓度、有害气体的实时监测,提高了消防救援人员对现场火灾信息的准确了解,另外通过在六轴十二翼无人机的浆座与螺旋桨之间的连接处安装断桨保护机构,当螺旋桨损坏时,断桨保护机构启动,将故障螺旋浆进行自动抛出,从而保证多旋翼无人机任务的正常进行。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
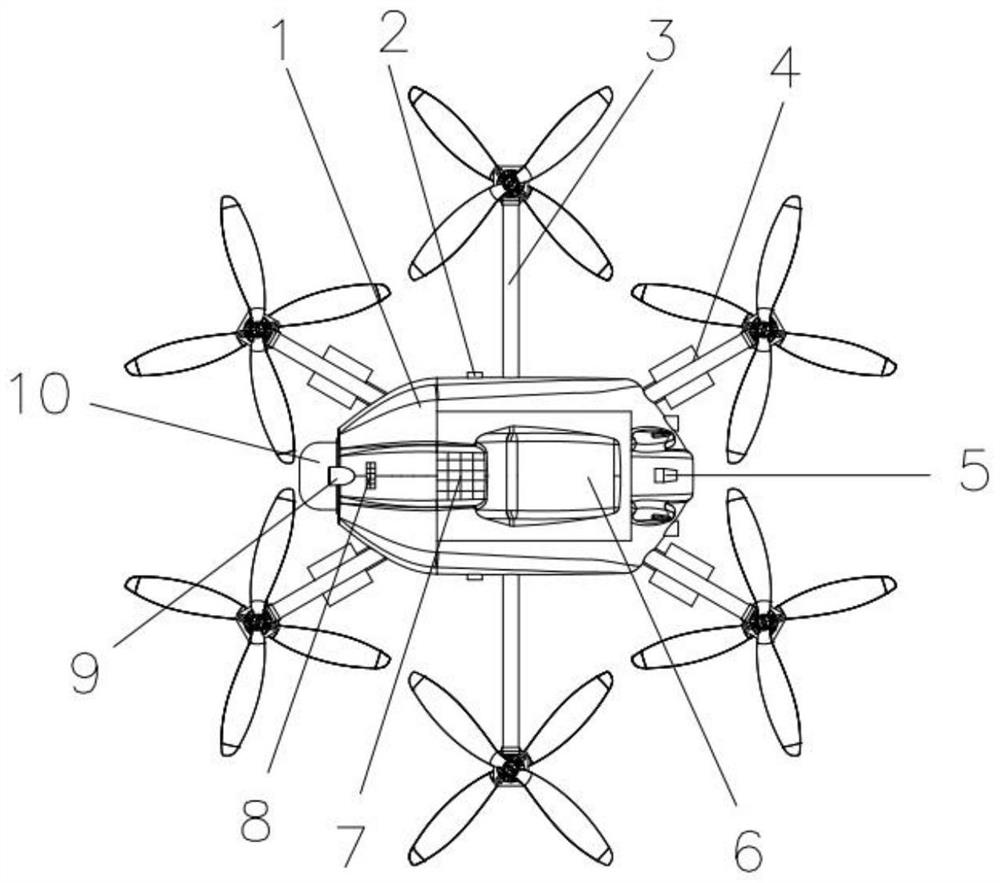
图1为本发明的结构示意图。
图2为图1的主视图。
图3为本发明断桨保护机构的结构示意图。
图4为本发明的收纳仓与电池、微处理器和功率检测仪的位置示意图。
图5为本发明的电路原理框图。
附图标记说明:
1—六轴十二翼无人机; 2—照明灯; 3—机臂;
4—仓室; 5—数据通信模块; 6—收纳仓;
7—太阳能电池板; 8—天线; 9—红外热成像仪;
10—3D激光雷达; 11—微控制器; 12—电池;
13—机座; 14—高清摄像头; 15—温度传感器;
16—湿度传感器; 17—螺旋桨; 18—浆盖;
19-1—第一硅钢片; 19-2—第二硅钢片; 20—浆座;
21—方型卡; 22—功率检测仪; 23—电机;
24—气体传感器; 25—粉尘传感器; 26—继电器。
具体实施方式
如图1至图4所示的一种六轴十二翼侦测及预警消防无人机,包括六轴十二翼无人机1的机体和六个机臂3,机臂3上设置有螺旋桨机构,其特征在于:所述六轴十二翼无人机1的机体上设置有监控模块,所述监控模块包括依次连接的数据采集模块、数据处理模块和数据通信模块5;
所述螺旋桨机构包括机座13和两个对称设置在机座13上下两侧的浆座20,浆座20上安装有螺旋桨17和方型卡21,方型卡21上设置有第一硅钢片19-1,螺旋桨17上设置有与第一硅钢片19-1配合的第二硅钢片19-2,第一硅钢片19-1通过电池12供电,电池12给第一硅钢片19-1供电的回路中串联有继电器26;
所述数据处理模块和功率检测仪22设置在所述六轴十二翼无人机1中收纳仓6内,数据处理模块包括电子线路板,所述电子线路板上集成有微控制器11,功率检测仪22与微控制器11连接,继电器26由微控制器11控制。
如图5所示,本实施例中,所述数据采集装置包括传感器组、3D激光雷达10、红外热成像仪9、高清摄像头14,所述传感器组安装在仓室4上,所述传感器组包括温度传感器15、湿度传感器16、气体传感器24和粉尘传感器25,所述温度传感器15、湿度传感器16、气体传感器24和粉尘传感器25的输出端均与所述数据处理模块的输入端连接;
本实施列中,所述电池12给继电器26和第一硅钢片19-1通电。
所述高清摄像头14安装在六轴十二翼无人机机体1底部,所述红外热成像仪9和激光雷达10均安装于六轴十二翼无人机机体1前端。
本实施例中,所述3D激光雷达10采用VLP-16型号。
本实施例中,所述红外热成像仪9采用FLIR Duo型号。
本实施例中,所述高清摄像头14采用PSDK 102S型号。
本实施例中,所述温度传感器15采用MEAS TSYS01型号。
本实施例中,所述湿度传感器16采用恒歌HK2020101601型号。
本实施例中,所述气体传感器24采用SK303型号。
本实施例中,所述粉尘传感器25采用GCG1000型号。
本实施例中,所述功率检测仪22采用BT3562型号。
本实施例中,所述气体传感器24包括一氧化碳气体浓度传感器、二氧化碳气体浓度传感器、氯气浓度传感器、二氧化硫气体浓度传感器、氨气浓度传感器。
本实施例中,所述一氧化碳气体浓度传感器采用MQ-7型号。
本实施例中,所述二氧化碳气体浓度传感器采用MH-Z19C红外气体传感器型号。
本实施例中,所述氨气浓度传感器采用BITS126传感器型号。
本实施例中,所述氯气浓度传感器采用GT903-CL2传感器型号。
本实施例中,所述二氧化硫气体浓度传感器采用SO2-CF-100传感器型号。
本实施例中,实际使用时,温度传感器15对火灾现场的温度进行检测,并将检测到的温度发送至微控制器11,湿度传感器15对火灾现场的湿度进行检测,并将检测到的湿度发送至微控制器11,一氧化碳气体浓度传感器、二氧化碳气体浓度传感器、氯气浓度传感器、二氧化硫气体浓度传感器、氨气浓度传感器分别对火灾现场的一氧化碳气体浓度、二氧化碳气体浓度、氯气浓度、二氧化硫气体浓度、氨气浓度进行检测,并将检测到的一氧化碳气体浓度、二氧化碳气体浓度、氯气浓度、二氧化硫气体浓度、氨气浓度发送至微控制器11,粉尘传感器25对火灾现场的粉尘浓度进行检测并将检测到的粉尘浓度发送至微控制器11;
本实施例中,微控制器11将火灾现场监测到的温度、湿度、一氧化碳气体浓度、二氧化碳气体浓度、氯气浓度、二氧化硫气体浓度、氨气浓度、粉尘浓度进行检测,并将检测到的一氧化碳气体浓度、二氧化碳气体浓度、氯气浓度、二氧化硫气体浓度、氨气浓度、粉尘浓度进行检测等火灾现场数据通过数据通信模块5发送至地面的监控计算机,监控计算机将接收到的温度、湿度、一氧化碳气体浓度、二氧化碳气体浓度、氯气浓度、二氧化硫气体浓度、氨气浓度、粉尘浓度进行检测分别与温度设定值、湿度设定值、一氧化碳气体浓度设定值、二氧化碳气体浓度设定值、氯气浓度设定值、二氧化硫气体浓度设定值、氨气浓度设定值、粉尘浓度设定值进行检测设定值比对,当温度、湿度、一氧化碳气体浓度、二氧化碳气体浓度、氯气浓度、二氧化硫气体浓度、氨气浓度、粉尘浓度分别与温度设定值、湿度设定值、一氧化碳气体浓度设定值、二氧化碳气体浓度设定值、氯气浓度设定值、二氧化硫气体浓度设定值、氨气浓度设定值、粉尘浓度设定值不符合时,监控计算机预警提醒;
本实施例中,高清摄像头14对火灾现场的图像进行采集并将检测到的火灾现场图像通过数据通信模块5发送至地面的监控计算机,便于通过监控计算机进行远程监控;
本实施例中,红外热成像仪9对火灾现场的热红外图像进行采集并将检测到的热红外图像传输至微控制器11,微控制器11处理火灾现场的热红外图像,通过数据通信模块5发送至地面的监控计算机,便于通过监控计算机进行远程监控;
本实施例中,所述浆座20通过电机23安装在机座13上,所述电机23的转动通过浆座20带动螺旋桨17旋转。
本实施例中,3D激光雷达10连续监测火灾现场烟雾分布并发送至微控制器11。
本实施例中,所述太阳能电池板7的输出端通过太阳能控制器为电池12充电。
本实施例中,太阳能控制器可参考KW1210、KW1215、KW1220或者、KW1230的太阳能控制器12V。
本实施例中,所述电池12为微控制器11和其他用电模块供电。
本实施例中,所述微控制器11为STM32F103ZET6的ARM微控制器;
本实施例中,实际使用时,所述电池12为12V电池。
本实施例中,实际使用时,所述电池12的输出端接有12V转5V电源模块和与12V转5V电源模块输出端连接的5V转3.3V电源模块。
本实施例中,实际使用时,所述12V转5V电源模块可采用LM7805电源转换模块,所述5V转3.3V电源模块可参考ASM1117-3.3V电源转换模块。
本实施例中,所述第一硅钢片19-1和第二硅钢片19-2采用DJS-180嵌入式磁力锁硅钢片。
本实施例中,所述DJS-180锁工作电压为12V±0.5V,工作电流为300mA±20mA,抗拉力值(吸力值)为400-1800N范围内。
本实施例中,实际使用时,所述向心力的计算公式为:
F=m×w
其中,F表示螺旋桨向心力,单位:N
m表示螺旋桨质量,单位:Kg
w表示螺旋桨角速度,单位:rad/s
r表示螺旋桨旋转形成圆的半径,单位:m
其中,螺旋桨角速度计算公式为:
w=2πn/60 ②
其中,π取3.14;N表示电机23的转速,单位:转/min
将n=3000转/min代入②式中得:
w=2πn/60
=2×3.14×3000/60
=314
从而得到螺旋桨角速度为314rad/s,取螺旋桨质量0.02Kg,r=0.1m,将上述数据其代入①式中,得:
F=m×w
=0.02×314×314×0.1
≈197.2。
本实施列中,实际使用时,六轴十二翼无人机1上的电机23最大转速设置为3000转/min,螺旋桨17所产生的向心力(离心力)为197.2N,而螺旋桨17所产生的磁力最小为400N,达到了无人机在飞行过程中正常工作的要求。
本实施列中,螺旋桨17实际安装时,当六轴十二翼无人机1处于非工作状态时,螺旋桨17通过方形卡21卡在浆座20上,再盖上浆盖18,以保证六轴十二翼无人机1在飞行前的部件完整;当六轴十二翼无人机1准备起飞时,微控制器11控制继电器26闭合,电池12通过继电器26为第一硅钢片19-1通电,第一硅钢片19-1通电产生强大的磁力与螺旋桨17上的第二硅钢片19-2产生强大的吸力,从而吸附住螺旋桨17。
本实施列中,具体实施时,当六轴十二翼无人机1准备起飞时,首先将螺旋桨17安装在浆座20上,方型卡21卡住螺旋桨17,盖上浆盖18。
本实施列中,具体实施时,六轴十二翼无人机1在飞行的过程中,功率检测仪22实时监测轴十二翼无人机1上的电机23运转情况,并将数据传输至微控制器11,微控制器11得到电机23的功率,如果电机23的功率符合电机正常工作功率设定值时,说明螺旋桨17正常;如果电机23的功率不符合电机23正常工作功率设定值时,说明螺旋桨17损坏,需要启动断桨保护机构,微控制器11控制继电器26断开,第一硅钢片19-1断电,从而第一硅钢片19的磁性消失,损坏的螺旋桨17在强大的离心力作用下从方型卡21卡口处脱离并被抛出,螺旋桨17抛出后,由另一组正常螺旋桨17继续工作,从而达到六轴十二翼无人机1继续执行任务的目的。
以上所述,仅是本发明的较佳实施例,并非对本发明作任何限制,凡是根据本发明技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均仍属于本发明技术方案的保护范围内。
- 一种六轴十二翼侦测及预警消防无人机
- 一种六轴十二翼侦测及预警消防无人机