一种基于人机协作的铸件打磨控制系统及其控制方法
文献发布时间:2023-06-19 10:13:22
技术领域
本发明涉及大型铸件打磨装备技术领域,具体涉及一种基于人机协作的铸件打磨控制系统及其控制方法。
背景技术
目前,中国已成为铸造业大国,铸件的清理在铸造生产中是不可缺少的一道关键工序。但由于现有铸造生产的机械化和自动化的程度很低,国内各个厂家还仍然停留在依靠人工进行打磨,处理铸件毛坯上的浇冒口、飞边、毛刺等。在大型、重型铸件打磨过程中,使用人工打磨,需要大量的场地,生产效率低下,打磨质量不能保证,这些因素都严重制约着中国的铸造行业的良性发展。
熟悉中国铸造业发展历史和近半个世纪全球产业转移历程的人员都很清楚,铸造业作为制造业中不可或缺的重要一环,却严重依赖人工作业,随着发达国家人均收入的提高,越来越没有人员从事这一又脏又累的行业,铸造业都成为了当地的夕阳产业,被迫转移到了发展中国家,因此出现了上个世纪后半叶欧美日等发达国家大量向中国转移铸造业的浪潮,刚好中国也具有庞大的铸造业从业人员和产业基础,成功地完成了这次产业大转移,为近40年世界的制造业大发展做出了巨大贡献。但是随着中国国民经济的发展和人均收入接近中等收入水平后,也同样面临着产业工人严重流失、招工难、用工成本大幅上升的困境,可是放眼全球,再也找不到和当年中国一样规模的产业工人和产业基础的国家和地区,如果找不到产业转移的承接着,整个铸造业将面临着没落和消亡,对全球的制造业和中国的制造业发展都将造成严重的影响。所以,铸造业的产业升级和自动化改造成为了我国目前不得不解决的难题。
为了解决目前铸造件打磨的人工紧缺问题,急需提供一种替代人工打磨操作的机械装置,并通过控制系统对打磨装置进行有效控制,实现人机协作打磨控制,提高铸件表面打磨质量和效率,有效解决现有技术存在的不足和缺陷。
发明内容
本发明的目的就在于:针对目前存在的上述问题,提供一种替代人工打磨操作的机械装置,并通过控制系统对打磨装置进行有效控制,实现人机协作打磨控制,提高铸件表面打磨质量和效率,有效解决现有技术存在的不足和缺陷。
为了实现上述目的,本发明采用的技术方案是:
一种用于人机协作的铸件打磨控制系统,包括控制室、驾驶座椅以及扶梯;所述控制室由多块钢板相互焊接组拼而成,控制室的前侧及左侧壁面开设有方形观察窗,观察窗内固定安装有透明防弹玻璃;所述控制室的右侧壁开设有方形门孔,门孔位置铰接安装有房门;所述房门外侧设置有用于方便操作人员进出控制室的阶梯形扶梯,扶梯外沿固定焊接用于方便人手扶的护栏;所述控制室底部为底板,底板底部固定焊接有三角形钢架结构的支撑钢架;所述支撑钢架的底面固定设置有垫块;所述控制室内部的后壁下方固定安装有工控机,控制室后壁上部固定安装有用于调节控制室内部温度环境的智能空调;控制室内部的底板上固定安装有驾驶座椅,所述驾驶座椅的左侧安装有遥控手柄,驾驶座椅的右侧安装有操作杆,所述门孔内侧固定安装有用于显示和设置打磨参数的触摸面板,所述触摸面板的显示面面向驾驶座椅前侧。
优选的,所述控制室的内壁钢板设置有隔音材料层,隔音材料层的内侧设置有保温隔热层,保温隔热层的内侧设置有阻燃材料层;控制室内的钢板、隔音材料层、保温隔热层以及阻燃材料层之间固定粘接为一体。
优选的,所述支撑钢架包括至少4组钢架,每组钢架包括1根垂直方钢和2根连接钢柱,连接钢柱与垂直方钢的两个侧壁固定焊接,且连接钢柱的上端与控制室的底板固定焊接,使连接钢柱、垂直方钢以及底板之间形成三角结构。
优选的,所述垫块为耐磨橡胶垫,垫块的厚度至少为5mm,且垫块的俯视表面积大于支撑钢架底面的横截面积。
优选的,所述房门上安装有指纹防盗锁,限定录入指纹的操作人员能够进入控制室进行操控作业,房门上部开设有方形孔,该方形孔内安装有透明防弹玻璃,用于方便安全人员巡检观察控制室内部状况。
优选的,所述扶梯的底部为钢质阶梯,钢质阶梯的底部设置有垂直方钢,垂直方钢底部固定设置有垫块,确保钢质阶梯的最上段阶梯与控制室的底板相互平齐。
如上所述的一种用于人机协作的铸件打磨控制系统的控制方法,包括如下控制步骤:
步骤一:操作人员进入控制室,坐在驾驶座椅上,调整好坐立姿势;
步骤二:操作人员在触摸面板上对打磨参数进行设置,确定操控参数;
步骤三:操作人员右手操控遥控手柄,左手操控操作杆;通过遥控手柄配置触觉力反馈手操器,并对打磨机器人进行遥控操作;通过触觉力反馈手操器感知机器人的机械臂与打磨工件之间的接触力,根据接触状态调整打磨机器人与工件之间的打磨接触程度,实现在不对机器人编程控制的基础上对机器人进行适时控制;操作杆用于控制机器人的腕关节,实现机器人的打磨主轴倾覆翻转和上下进给控制;
步骤四:当打磨工作完成之后,通过操作杆操作停止打磨主轴的进给,并通过遥控手柄将打磨机器人的机械臂撤回离开工件,完成一次打磨任务。
优选的,所述打磨参数包括打磨主轴的旋转方向、打磨主轴的转速、打磨主轴的进给量、触觉手操控器的运行范围以及操控模式切换。
由于采用了上述技术方案,本发明的有益效果是:
一方面,本申请可以实现在不编程的情况下对打磨机器人进行有效控制,实现人机协同控制打磨,有效避免人工打磨过程的费时费力以及编程打磨的程序固化问题,实现表面不规则大型铸件的表面高效高质量打磨控制。
另一方面,本申请通过一位操作员即可实现整个打磨过程的有效控制,实现人机协作的智能化操控,进而有效解决现有技术存在的人工打磨劳动力紧缺问题,为实现工业4.0升级提供技术基础和产业支撑,利于推进绿色铸造行业的发展和进步。
附图说明
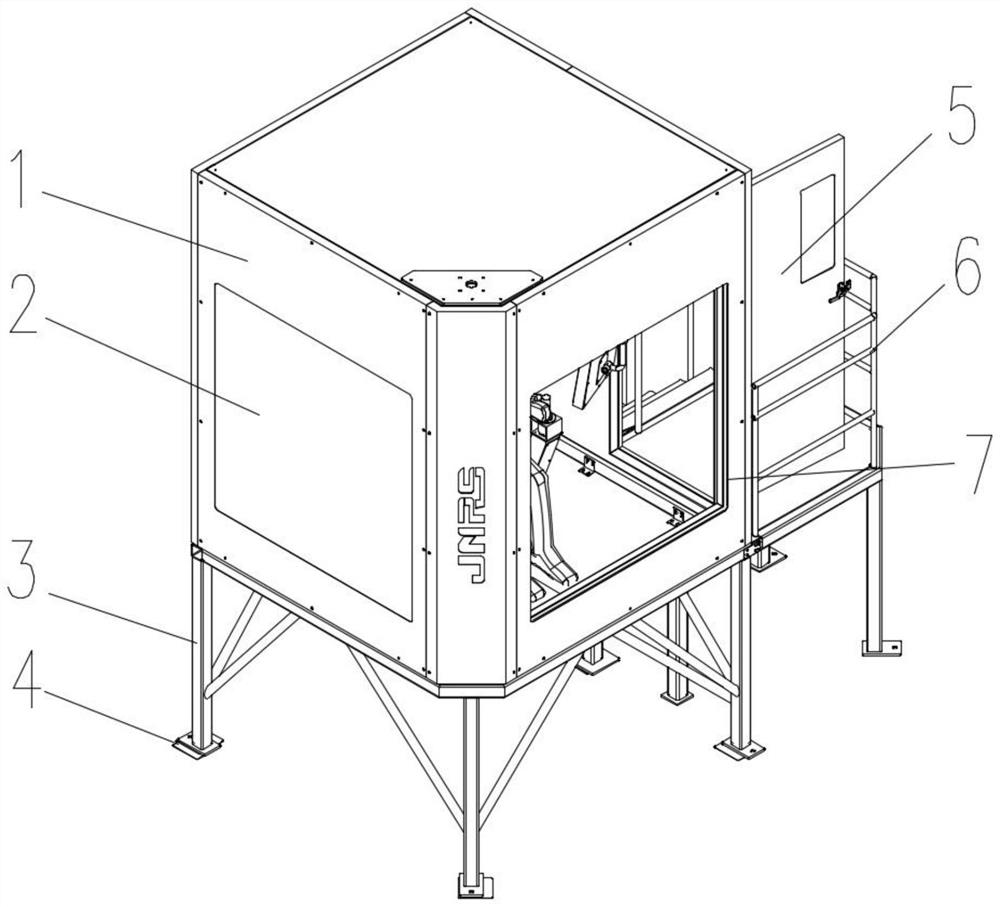
图1为本发明的操作室整体结构示意图;
图2为本发明的操作室内部结构示意图;
图3为本发明的驾驶座椅结构示意图。
图中:1、控制室;2、防弹玻璃;3、支撑钢架;4、垫块;5、房门;6、扶梯;7、观察窗;8、智能空调;9、工控机;10、底板;11、驾驶座椅;12、遥控手柄;13、操作杆;14、触摸面板。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1,如图1-3所示:
一种用于人机协作的铸件打磨控制系统,包括控制室1、驾驶座椅11以及扶梯6;所述控制室1由多块钢板相互焊接组拼而成,控制室1的前侧及左侧壁面开设有方形观察窗7,观察窗7内固定安装有透明防弹玻璃2;所述控制室1的右侧壁开设有方形门孔,门孔位置铰接安装有房门5;所述房门5外侧设置有用于方便操作人员进出控制室1的阶梯形扶梯6,扶梯6外沿固定焊接用于方便人手扶的护栏;所述控制室1底部为底板10,底板10底部固定焊接有三角形钢架结构的支撑钢架3;所述支撑钢架3的底面固定设置有垫块4;所述控制室1内部的后壁下方固定安装有工控机9,控制室1后壁上部固定安装有用于调节控制室1内部温度环境的智能空调8;控制室1内部的底板10上固定安装有驾驶座椅11,所述驾驶座椅11的左侧安装有遥控手柄12,驾驶座椅11的右侧安装有操作杆13,所述门孔内侧固定安装有用于显示和设置打磨参数的触摸面板14,所述触摸面板14的显示面面向驾驶座椅11前侧。
优选的,所述控制室1的内壁钢板设置有隔音材料层,隔音材料层的内侧设置有保温隔热层,保温隔热层的内侧设置有阻燃材料层;控制室1内的钢板、隔音材料层、保温隔热层以及阻燃材料层之间固定粘接为一体。
优选的,所述支撑钢架3包括至少4组钢架,每组钢架包括1根垂直方钢和2根连接钢柱,连接钢柱与垂直方钢的两个侧壁固定焊接,且连接钢柱的上端与控制室1的底板10固定焊接,使连接钢柱、垂直方钢以及底板10之间形成三角结构。
优选的,所述垫块4为耐磨橡胶垫,垫块4的厚度至少为5mm,且垫块4的俯视表面积大于支撑钢架3底面的横截面积。
优选的,所述房门5上安装有指纹防盗锁,限定录入指纹的操作人员能够进入控制室1进行操控作业,房门5上部开设有方形孔,该方形孔内安装有透明防弹玻璃2,用于方便安全人员巡检观察控制室1内部状况。
优选的,所述扶梯6的底部为钢质阶梯,钢质阶梯的底部设置有垂直方钢,垂直方钢底部固定设置有垫块4,确保钢质阶梯的最上段阶梯与控制室1的底板10相互平齐。
如上所述的一种用于人机协作的铸件打磨控制系统的控制方法,包括如下控制步骤:
步骤一:操作人员进入控制室1,坐在驾驶座椅11上,调整好坐立姿势;
步骤二:操作人员在触摸面板14上对打磨参数进行设置,确定操控参数;
步骤三:操作人员右手操控遥控手柄12,左手操控操作杆13;通过遥控手柄12配置触觉力反馈手操器,并对打磨机器人进行遥控操作;通过触觉力反馈手操器感知机器人的机械臂与打磨工件之间的接触力,根据接触状态调整打磨机器人与工件之间的打磨接触程度,实现在不对机器人编程控制的基础上对机器人进行适时控制;操作杆13用于控制机器人的腕关节,实现机器人的打磨主轴倾覆翻转和上下进给控制;
步骤四:当打磨工作完成之后,通过操作杆13操作停止打磨主轴的进给,并通过遥控手柄12将打磨机器人的机械臂撤回离开工件,完成一次打磨任务。
优选的,所述打磨参数包括打磨主轴的旋转方向、打磨主轴的转速、打磨主轴的进给量、触觉手操控器的运行范围以及操控模式切换。
由于采用了上述技术方案,本发明的有益效果是:
一方面,本申请可以实现在不编程的情况下对打磨机器人进行有效控制,实现人机协同控制打磨,有效避免人工打磨过程的费时费力以及编程打磨的程序固化问题,实现表面不规则大型铸件的表面高效高质量打磨控制。
另一方面,本申请通过一位操作员即可实现整个打磨过程的有效控制,实现人机协作的智能化操控,进而有效解决现有技术存在的人工打磨劳动力紧缺问题,为实现工业4.0升级提供技术基础和产业支撑,利于推进绿色铸造行业的发展和进步。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
- 一种基于人机协作的铸件打磨控制系统及其控制方法
- 一种基于人机协作的铸件打磨控制系统及其控制方法