非侵入式脑神经疗法
文献发布时间:2023-06-19 10:14:56
相关申请的引证
本申请要求享有2018年5月18日提交的美国临时专利申请No.62/673,578和2018年11月9日提交的美国临时专利申请No.62/757,775的优先权,这两个临时专利申请的内容通过引用以其全部内容结合于本文中。
关于联邦政府资助的研究或开发的声明
本发明是使用在美国国立卫生研究院(National Institute of Health)授予的资助项目No.P2HCD086844之下的政府支持而完成的。该政府拥有本发明的某些权利。
背景技术
患有缺氧缺血性脑病(hypoxic ischemic encephalopathy)(HIE)的早产儿和足月儿具有运动障碍的高风险,主要表现为其新生儿住院期间的进食延迟(feeding delay)。口部运动失调在两组婴儿人群中都很常见,并且通常需要在医院进行3-6周的口服进食工作之后婴儿才能摄取足够的母乳或配方奶以维持足够的生长以便出院。通常而言,婴儿每天要进行专业治疗一次,以确保进食细节,如乳头选择,口服进食频率,不会对婴儿的生理造成太大的负担,并指导这种运动技能学习。进食困难是早产或HIE婴儿延迟出院的主要原因。许多这些婴儿在足龄(妊娠40-42周)之前将无法掌握这项运动技能,并将接受胃造口管(gastrostomy tube)(G-管)而直接进行胃进食,以便他们最终可以从医院出院回家。新生儿重症监护病房(NICU)每年平均放置40条G-管。该过程需要全身麻醉以完成插管和最终取管,并在上腹部(epigastric area)留下疤痕。G-管还会增强父母认为孩子不正常并且他或她的发育潜力比“正常”孩子更有限的感觉。
即使患有严重的脑损伤,众所周知,婴儿的神经可塑性可能导致改善甚至接近正常结果。这种神经可塑性包括刺激神经产生和修复性神经元间连接,以改善新生儿动物模型和中风后成人的运动技能。另外,已知的是可以通过使用各种方式(modality,模式)的脑刺激增强康复训练。
新生儿的进食涉及一系列的吮吸、吞咽和呼吸,这需要面部、头部和颈部肌肉与支气管和心脏的髓鞘迷走神经调节(myelinated vagal regulation)相协调。在早产儿中,进食所需的肌肉发育不足,导致需要进行OT康复才能“学习”进食方式。早产儿有效进食失能是住院延期的主要原因。在患有HIE的新生儿中,皮层和基底神经节的发育被中断,并且根据严重程度,正常的发育可塑性受到阻碍,从而进一步导致它们进食失能。两种类型的进食困难都涉及复杂的运动学习,这需要整合感觉和运动途径。
因此,在本领域中需要用于实施神经刺激以增强神经可塑性和肌肉训练的改进系统和方法。本发明满足了这一需求。
发明内容
在一方面中,本发明提供了一种增强口部运动技能的方法,包括以下步骤:提供一种脑神经刺激系统,其包括至少一个传感电极和至少一个刺激电极;将所述至少一个传感电极固定于受试者的脸颊或颌肌邻近,并将所述至少一个刺激电极固定于受试者的脑神经;为该受试者提供食物源;使用所述至少一个传感电极测量超过最小阈值的肌肉激活;和响应于肌肉激活的测量值超过最小阈值,使用所述至少一个刺激电极对脑神经实施刺激。
在一个实施方式中,该脑神经选自由以下组成的组中:三叉神经,面神经,副神经,舌下神经,迷走神经耳分支,和迷走神经主束(main bundle of the vagus nerve)。在一个实施方式中,该测量步骤和实施步骤在闭环中重复。在一个实施方式中,该至少一个刺激电极非侵入式固定于受试者耳道(ear canal)、耳屏(tragus)、耳甲艇(cymba conchae)、耳叶(lobe)、耳轮(helix)、对耳轮(anti-helix)、乳突(mastoid)或颈部。
在一个实施方式中,该最小阈值是选自由以下各项组成的组中的绝对值:约0.1μV、0.5μV、1μV、5μV、10μV、50μV、100μV、200μV、300μV、400μV、500μV、1mV、5mV、10mV、20mV、30mV、40mV或50mV。在一个实施方式中,该最小阈值是选自由以下各项组成的组中相对于静止时的基础测量值的变化:0.1μV、0.5μV、1μV、5μV、10μV、50μV、100μV、200μV、300μV、400μV、500μV、1mV、5mV、10mV、20mV、30mV、40mV或50mV。在一个实施方式中,该最小阈值是选自由约以下值组成的组中的肌肉最大潜力(potential,电位)百分比:1%、2%、3%、4%、5%、10%、15%、20%、25%、30%、35%、40%、45%、50%、55%、60%、65%、70%、75%、80%、85%、90%或95%。
在一个实施方式中,该刺激具有选自由约以下值组成的组中的强度:约0.01mA、0.05mA、0.1mA、0.2mA、0.3mA、0.4mA、0.5mA、0.6mA、0.7mA、0.8mA、0.9mA、1mA、1.5mA、2mA、2.5mA、3mA、3.5mA、4mA、4.5mA、5mA、6mA、7mA、8mA、9mA和10mA。在一个实施方式中,该刺激具有选自由约以下值组成的组中的频率:约1Hz、2Hz、3Hz、4Hz、5Hz、6Hz、7Hz、8Hz、9Hz、10Hz、15Hz、20Hz、25Hz、30Hz、35Hz、40Hz、45Hz和50Hz。在一个实施方式中,该刺激具有选自由约以下值组成的组中的脉冲宽度:约10μs、20μs、30μs、40μs、50μs、60μs、70μs、80μs、90μs、100μs、150μs、200μs、250μs、300μs、350μs、400μs、450μs、500μs、550μs、600μs、650μs、700μs、750μs、800μs、850μs、900μs、950μs和1ms。在一个实施方式中,该刺激具有接通持续时间和断开持续时间,每个都选自由约以下值组成的组中:0.1秒、0.5秒、1.5秒、2秒、2.5秒、3秒、3.5秒、4秒、4.5秒、5秒、10秒、20秒、30秒、40秒、50秒、1分钟、2分钟、3分钟、4分钟、5分钟、10分钟、15分钟、20分钟、30分钟、40分钟、45分钟、50分钟和1小时。
在另一方面中,本发明提供一种脑神经刺激系统,其包括:至少一个传感电极,其构造成附连在至少一块肌肉邻近;和至少一个刺激电极,其构造成附连在脑神经邻近;其中所述至少一个刺激电极电连接至所述至少一个传感电极,而使所述至少一个刺激电极在所述至少一个传感电极测量所述至少一根肌肉中的电能经过最低阈值时被激活而刺激脑神经。
在一个实施方式中,该至少一根脑神经选自由以下各项组成的组中:三叉神经,面神经,副神经,舌下神经,迷走神经耳廓分支,和迷走神经主束。
在一个实施方式中,该系统还包括电源、发射器和处理器,该处理器通信连接至其上存储有指令的非暂时性计算机可读存储器,当由该处理器执行该指令时,会启动所述至少一个刺激电极随着所述至少一个传感电极测量通过最小阈值的电能的激活与去激活之间的闭环同步(closed-loop synchronization)。
在一个实施方式中,该系统还包括一个奶瓶,该奶瓶包括至少一个传感器、电源和发射器。在一个实施方式中,该至少一个传感器选自由以下各项组成的组中:流量传感器,压力传感器,吮吸传感器,陀螺仪,加速度计,温度传感器和体积传感器。在一个实施方式中,该系统还包括电源、发射器和处理器,该处理器通信连接至其上存储有指令的非暂时性计算机可读存储器,当由该处理器执行所述指令时,将所述至少一个刺激电极随着所述至少一个传感电极传感来自奶瓶的进食和来自所述奶瓶的进食终止的激活和去激活同步。
在另一方面中,本发明提供了一种增强肌肉康复的方法,包括以下步骤:提供一种脑神经刺激系统,其包括至少一个传感电极和至少一个刺激电极;将所述至少一个传感电极固定于所关注的受试者肌肉群附近,并将所述至少一个刺激电极固定至受试者的脑神经;使用所述至少一个传感电极测量超过最小阈值的肌肉群的激活;响应于肌肉群激活的测量超过最小阈值,使用所述至少一个刺激电极对脑神经实施刺激。
在一个实施方式中,该脑神经选自由以下各项组成的组中:三叉神经,面神经,副神经,舌下神经,迷走神经耳分支,和迷走神经主束。在一个实施方式中,该测量步骤和实施步骤在闭环中重复。
附图说明
当结合附图阅读时,将更好地理解本发明的示例性实施方式的以下详细描述。然而,应当理解的是,本发明不限于附图中所示实施方式的精确排布和技术手段。
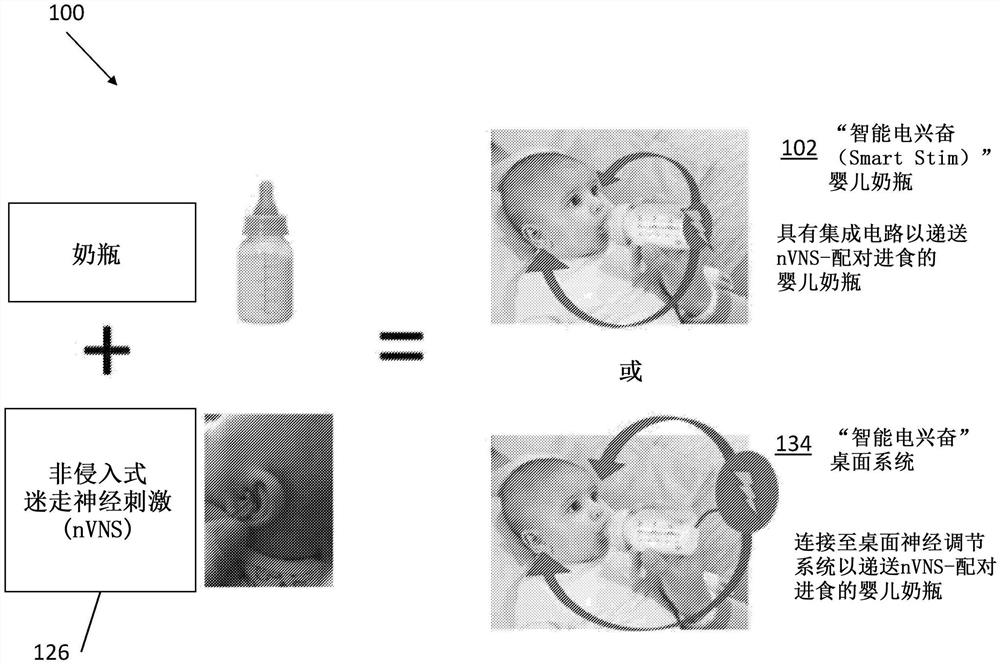
图1A和图1B描绘了用于与新生儿进食配对非侵入式脑神经刺激的示例性系统的图。
图2描绘了显示用于新生儿进食时触发脑神经刺激的示例性系统的图。
图3描绘了显示用于肌肉康复中触发脑神经刺激的示例性系统的图。
图4描绘了用于训练新生儿进食的示例性方法的流程图。
图5描绘了训练肌肉康复的示例性方法的流程图。
图6描绘了用于训练新生儿进食行为中的肌肉活化检测和刺激的示例性肌电图电极设置。
图7描绘了研究递送由新生儿进食中可视吮吸引起的最可靠刺激触发的最佳电极位置的实验结果。
图8描绘了研究新生儿进食中记录可视吮吸时递送最高刺激率的最佳电极位置的实验结果。
图9描绘了具有进食困难的婴儿的样本中的历史进食数据。
图10描绘了对14个进食困难的婴儿实施脑神经治疗的结果。
图11描绘了图10所示的治疗组中的8位反应者的统计分析结果;这些响应者具有口服进食行为的显著变化,这由线性回归线斜率的显著变化指示。
图12描绘了图10所示的治疗组中的6位无反应者的统计分析结果;无响应者具有的线性回归斜率与零无显著性差异,这表明没有实现改善。
图13A和图13B描绘了研究脑神经疗法对婴儿脑白质束完整性的影响的实验结果。图13A显示了反应者(完全进食)和无反应者(G管)之间左外囊(Left External Capsule)和右胼胝体(Right Corpus Callosum)的每周各向异性分数(fractional anisotropy)(FA)变化,这两个所关注的白质区域在运动整合中很重要。图13B显示了反应者(完全进食)和无反应者(G管)之间左后丘脑放射(Left Posterior Thalamic Radiation)(PTR)和右下枕前筋膜(Right Inferior Front-Occipital Fasciculus)(IFOF)的每周轴向弥散峰度(axialkurtosis)(K
具体实施方式
应当理解的是,本发明的附图和描述已经进行简化,以说明与清楚理解本发明相关的元件,而同时为了清楚起见,消除了本领域中通常存在的许多其他元件。本领域普通技术人员可以认识到,在实现本发明时其他元件和/或步骤是所需的和/或要求的。然而,由于这样的元件和步骤在本领域中是众所周知的,并且因为它们不促进对本发明的更好理解,因此本文中不提供对这样的元件和步骤的讨论。本文的公开内容涉及对本领域技术人员已知的这种元件和方法的所有这种变型和修改。
除非另有定义,否则本文使用的所有技术和科学术语具有与本发明所属领域的普通技术人员通常所理解的相同含义。尽管类似于或等同于本文描述的那些方法和材料的任何方法和材料都可以用于本发明的实践或测试中,但只描述了示例性的方法和材料。
正如本文所用,以下每个术语在本部分中具有与其相关的含义。
冠词“一种”和“一个”在本文中用于指代该冠词的一个或多个(即,至少一个)语法对象。例如,“一个元件”是指一个元件或一个以上的元件。
当涉及诸如用量、时间段等的可测量值时,本文所使用的“约”意指涵盖所规定值的±20%、±10%、±5%、±1%和±0.1%的变化,因此这些变化是合适的。
贯穿本公开,能够以范围形式提供本发明的各个方面。应当理解的是,范围形式的描述仅是为了方便和简洁,而不应该解释为对本发明范围的不灵活限制。因此,应该将范围的描述视为已具体公开了所有可能的子范围以及该范围内的各个数值。例如,对范围如1-6的描述应该视为已明确公开了子范围,如1-3,1-4,1-5,2-4,2-6,3-6等,以及该范围内的单个数,如1、2、2.7、3、4、5、5.3、6,以及它们之间的任何整体和部分增量。无论范围的广度如何,这都适用。
本发明部分基于用于提供非侵入式脑神经刺激的系统。该系统通过非侵入式附连至受试者的一根或多根脑神经的电极实施治疗。该系统能够用于通过改善神经可塑性并将肌肉训练与反馈耦合而增强康复和恢复。
刺激能够非侵入式施加于任何合适的脑神经。非限制性实例包括三叉神经,面神经,副神经,舌下神经,迷走神经耳廓分支,迷走神经主束等。迷走神经耳廓分支能够通过多种方式接触,包括但不限于,耳道,耳屏,耳甲艇(cymba conchae)、外耳、乳突(mastoid)及其组合。迷走神经主束能够沿颈部在任何合适位置接触。在各实施方式中,刺激经皮实施。刺激能够使用一个或多个以任何合适的方式,包括但不限于使用粘合剂、夹子、贴片、耳塞、头带、颈托、项圈、头套等,固定于脑神经附近的电极进行实施。
在一些实施方式中,本发明提供了旨在改善和加速新生儿学习进食行为的治疗工具。所提供的系统改变了早产新生儿实施康复的方式,从而使出院更早,医院成本更低,改善父母对婴儿发育潜力的感知,并减轻了压力并改善了与父母在医院内外的联系。该系统能够用作带回家的进食辅助工具,用于使错过了掌握进食技巧的发育窗口期的危重婴儿康复,以及用于患有使口服进食具有挑战性的先天性综合症的婴儿。
在进食学习任务期间采用促进可塑性的非侵入式性脑刺激治疗口部运动困难,成为经皮耳部迷走神经刺激(taVNS)的高度新颖的应用。主要前提是,在有运动障碍高风险的婴儿中,通过taVNS同时递送的脑部刺激将提高学习的进食任务中涉及的运动皮质可塑性,从而导致进食更好。当与指导皮层中发生塑性变化的成对刺激结合时手术植入的VNS可能会产生协同效应。本发明利用与进食配对的新形式的非侵入式迷走神经刺激(nVNS)(而不是通过外科手术植入),以加速和增强新生儿的进食学习。
现在参考图1A和图1B,描绘了示例性系统100。在各个实施方式中,系统100包括可以单独使用或组合使用以将脑神经刺激与反馈耦合而训练婴儿进食行为的多个组件。例如,在一些实施方式中,系统100包括奶瓶102、可穿戴设备122和计算机平台134。
奶瓶102能够包括任何所需的奶瓶,该奶瓶的储液器连接到具有适合于接合婴儿嘴部通常用于婴儿进食的乳头或其他孔的吸嘴(mouthpiece),并还添加至少一个流量传感器104,压力传感器106,陀螺仪108,加速度计110,温度传感器112,体积传感器114及其组合。该至少一个流量传感器104和压力传感器106能够用于检测和测量婴儿在进食过程期间获得的食物的计时和数量。该至少一个陀螺仪108和加速度计110能够用于检测和测量奶瓶102的位置,并随着时间的推移监测作为奶瓶102的运动的函数的进食行为。该至少一个温度传感器112能够用于监测奶瓶102的温度以指示该内容物是否处于合适的温度,或该内容物是否太冷或太热而无法食用。该至少一个体积传感器114可以用于检测和测量奶瓶102中剩余的食物量。任何合适的体积传感器114都可以使用,包括浮子传感器,超声液位传感器,激光液位传感器等。其他传感器也被考虑,如抽吸传感器,血压传感器,脉搏血氧饱和度传感器(pulse oximetry sensor),葡萄糖传感器等。在一些实施方式中,奶瓶102能够由电源116(如电池或电插头)供电。在一些实施方式中,奶瓶102能够还包括:有线或无线发射器118,用于发送由各传感器收集的数据;和非暂时性计算机可读介质120,其连接至处理器而存储由各传感器收集的数据。
可穿戴设备122包括感测和刺激组件的配搭,并能够采取由受试者穿戴以将该组件定位于感测和刺激所关注的区域附近的衣物或吊带是物品形式。可穿戴设备122包括至少一个电极124。所述至少一个电极124包括刺激电极,并还能够包括传感电极。刺激电极构造成实施电刺激,而传感电极构造成测量生理反应。例如,传感电极能够包括心电图电极,肌电图电极,脑电图电极等。在一些实施方式中,该刺激电极电连接至该传感电极。在各实施方式中,可穿戴122能够还包括一个或多个附加传感器,如温度传感器、血压传感器、脉搏血氧饱和度传感器、葡萄糖传感器等。可穿戴设备122还能够由电源126(如电池或电插头)供电。在一些实施方式中,可穿戴设备122还能够包括:有线或无线发射器128,用于发送由各电极和传感器收集的数据;有线或无线接收器130,用于接收用于激活刺激电极的指令;和非暂时性计算机可读介质132,连接至处理器以存储由各电极和传感器收集的数据。
计算机平台134包括:有线或无线发射器138,用于将指令发送到可穿戴设备122;有线或无线接收器140,用于收集来自奶瓶102、可穿戴设备122或这两者的数据;非暂时性计算机可读介质142,连接至处理器以存储指令和所收集的数据,并能够由电源136(如电池或电插头)供电。
正如上所述,系统100的各组件能够单独使用或组合使用以将脑神经刺激与反馈耦合。在非限制性的第一实例中,奶瓶102与可穿戴设备122耦合。奶瓶102能够通过奶瓶102处于进食位置的发射器118至接收器130的途径与可穿戴设备122通信。正如图2所示,奶瓶102能够感测通过阈值以启动触发器的体积、流量和/或压力的最小变化。奶瓶102与可穿戴设备122通信,以通过激活脑神经附近的电极124补充进食行为,从而刺激脑神经。进食行为能够由奶瓶102监测并进一步验证。进食行为也能够通过感测颊和颌肌肉激活的电极124进行监测和验证。进食能够通过定时和同步感测来自奶瓶102的进食开始和来自可穿戴设备122的刺激而继续。
在非限制性第二实例中,可穿戴设备122能够单独用作闭环系统。一块或多块颊和颌肌肉附近的传感电极124能够用于通过经过阈值而启动触发器的肌肉激活的最小变化而感测进食开始。响应于该触发器,可穿戴设备122通过激活脑神经附近的刺激电极124而补充进食行为。进食能够通过定时和同步感测来自电极124的进食开始和来自刺激电极124的刺激而继续。通过这种方式,可穿戴设备122充当感测指示进食开始的最小颊和颌肌肉激活与实施脑神经刺激之间的闭环系统。
计算机平台134能够用于补充奶瓶102和可穿戴式122之间的通信。计算机平台134还能够用于辅助对奶瓶102、可穿戴设备122或两者的操作、监测和数据收集/存储。在一些实施方式中,计算机平台134能够用于根据从奶瓶102、可穿戴设备122或两者接收的数据调节可穿戴设备122中的电极刺激的定时和强度。在一些实施方式中,可穿戴设备122中的电极刺激的定时和强度进行自动调节而将可测量的参数维持于由计算机平台134设置的阈值内。可测量参数包括,但不限于,心率,血压,肌肉激活速率,神经模式,奶瓶体积,奶瓶位置等。在本发明的一些方面中,执行本文提供的指令的软件可以存储于非暂时性计算机可读介质上,其中当在处理器上执行时,该软件执行本发明的一些或全部步骤。
本发明的方面涉及在计算机软件中执行的算法。尽管某些实施方式可以描述为以特定的编程语言编写,或在特定的操作系统或计算平台上执行,但应该理解的是,本发明的系统和方法不限于任何具体计算语言、平台或其组合。执行本文描述的算法的软件可以用本领域已知的任何编程语言进行编写、编译或解释,包括但不限于C、C++、C#、Objective-C、Java、JavaScript、Python、PHP、Perl、Ruby或Visual Basic。应该进一步理解的是,本发明的要素可以在任何可接受的计算平台上执行,包括但不限于,服务器,云站(cloudinstance),工作站,瘦客户端,移动设备,嵌入式微控制器,电视,或本领域已知的任何其他合适的计算设备。
本发明的部件被描述为在计算设备上运行的软件。尽管本文描述的软件可以公开为在一个具体的计算设备(例如,专用服务器或工作站)上运行,但在本领域中应该理解的是,该软件本质上是可便携的,并且出于本发明的目的,在专用服务器上运行的大多数软件还可以运行于包括台式或移动设备、膝上型计算机、平板电脑、智能手机、手表、可穿戴电子设备或其他无线数字/蜂窝电话、电视、云站、嵌入式微控制器、瘦客户端设备或本领域已知的任何其他合适的计算设备的任何广泛的设备上。
类似的是,本发明的部件被描述为在各种无线或有线计算机网络上通信。为了本发明的目的,词语“网络”、“联网”和“网络化”应该理解为涵盖有线以太网,光纤连接,包括各种802.11标准中任一种的无线连接,诸如3G或4G/LTE网络、
应当理解的是,系统100的组件不限于用于训练进食行为,并能够以各种方式用于增强婴儿发育。在一些实施方式中,脑神经刺激在增加脑白质完整性和脑各区域之间的区域间通信方面是有效的。在一些实施方式中,脑神经刺激在增强运动功能方面是有效的,使得包括抬头、滚动、坐起、抓握、抬起、投掷、爬行、行走、攀爬和下降的活动能够进行训练和改善。在一些实施方式中,脑神经刺激在调节行为方面是有效的。行为调节能够包括对良好行为的正向强化,对不良行为的负向强化,和神经和心理障碍或伤害的减少或治疗。
应当理解的是,系统100的组件不限于用于婴儿,并能够用于儿童、成人和老年人。在各实施方式中,系统100的组件还适用于动物,包括哺乳动物、爬行动物、鸟类、鱼类等。在一些实施方式中,脑神经刺激在治疗与肌肉有关的疾病和康复方面是有效的,如中风后上肢和下肢运动肢体康复范例,其中针对涉及特定康复范例的肌肉群。例如,现在参考图3,系统100的组件(如可穿戴设备122上的传感电极124)能够测量通过最小阈值而启动触发器的一个或多个所关注的肌肉群中的肌肉激活。可穿戴设备122能够通过激活脑神经附近的刺激电极124,由此刺激脑神经而补充肌肉激活。通过传感电极124能够监测和验证所关注的一个或多个肌肉群的进一步激活。肌肉激活能够通过定时和同步感测来自传感电极124的肌肉激活开始和来自刺激电极124的刺激而继续,如在一个闭环系统中。在一些实施方式中,脑神经刺激能够有效调节肌肉或神经疾病或障碍,包括但不限于帕金森氏病、运动障碍(dyskinesia)、肌张力障碍(dystonia)等。
本发明还部分基于用于实施非侵入式脑神经刺激的方法。正如本文其他地方所述,该方法通过改善神经可塑性并将肌肉训练与反馈耦合而有效增强康复和恢复。
在一些实施方式中,该方法涉及增强口部运动技能。现在参考图4,描绘了示例性方法200。方法200开始于步骤202,其中提供了脑神经刺激系统,该系统包括至少一个传感电极和至少一个刺激电极。在步骤204中,所述至少一个传感电极非侵入式固定于受试者的颊或颌肌肉附近,并且所述至少一个刺激电极非侵入式固定于受试者脑神经附近。在步骤206中,向受试者提供食物源。在步骤208中,使用超过最小阈值的所述至少一个传感电极测量肌肉激活,指示进食开始。在步骤210中,响应于超过最小阈值的肌肉激活的测量,使用所述至少一个刺激电极对脑神经实施刺激。
在一些实施方式中,受试者是婴儿,并且口部运动技能与吮吸有关。在各实施方式中,脑神经能够选自由三叉神经、面神经、副神经、舌下神经、迷走神经耳廓分支、迷走神经主束等组成的组中。在各实施方式中,电极使用粘合剂、夹子、贴片、耳塞、头带、颈托、项圈、头套等进行非侵入式固定。在一些实施方式中,步骤按所叙述的顺序实施。在各实施方式中,步骤208和步骤210在闭环系统中重复。
在一些实施方式中,该方法涉及肌肉康复。现在参考图5,描绘了示例性方法300。方法300开始于步骤302,其中提供了脑神经刺激系统,该系统包括至少一个传感电极和至少一个刺激电极。在步骤304中,所述至少一个传感电极非侵入式固定于所关注的受试者肌肉群附近,而所述至少一个刺激电极非侵入式固定于该受试者的脑神经附近。在步骤306中,使用超过最小阈值的所述至少一个传感电极测量肌肉群激活。在步骤308中,响应于超过最小阈值的肌肉群激活的测量,使用所述至少一个刺激电极对脑神经进行刺激。
在各种实施方式中,脑神经能够选自由三叉神经、面神经、副神经、舌下神经、迷走神经耳廓分支、迷走神经主束等组成的组中。在各实施方式中,电极使用粘合剂、夹子、贴片、耳塞、头带、臂带、托件(brace)、项圈、缠绕物等进行非侵入式固定。在一些实施方式中,步骤按照所叙述的顺序进行实施。在各实施方式中,步骤306和步骤308在闭环系统中重复。
在各实施方式中,本发明的方法选择肌肉激活的某些最小阈值。在一些实施方式中,这些方法对由绝对测量值确定的肌肉激活的最小阈值进行选择。例如,肌肉激活的最小阈值能够选自约0.1μV、0.5μV、1μV、5μV、10μV、50μV、100μV、200μV、300μV、400μV、500μV、1mV、5mV、10mV、20mV、30mV、40mV或50mV的绝对值。在一些实施方式中,这些方法对由相对于静止时基础测量值的变化确定的肌肉激活的最小阈值进行选择。例如,肌肉激活的最小阈值能够选自约0.1μV、0.5μV、1μV、5μV、10μV、50μV、100μV、200μV、300μV、400μV、500μV、1mV、5mV、10mV、20mV、30mV、40mV或50mV的增加或降低。在一些实施方式中,这些方法对由肌肉的典型最大潜力百分比确定的肌肉激活的最小阈值进行选择。例如,肌肉激活的最小阈值能够选自约1%、2%、3%、4%、5%、10%、15%、20%、25%、30%、35%、40%、45%、50%、55%、60%、65%、70%、75%、80%、85%、90%或95%的肌肉典型最大潜力。
在各实施方式中,本发明的方法选择用于脑神经刺激的某些参数。在一些实施方式中,这些方法选择刺激强度。例如,该刺激强度能够选自约0.01mA、0.05mA、0.1mA、0.2mA、0.3mA、0.4mA、0.5mA、0.6mA、0.7mA、0.8mA、0.9mA、1mA、1.5mA、2mA、2.5mA、3mA、3.5mA、4mA、4.5mA、5mA、6mA、7mA、8mA、9mA或10mA。在一些实施方式中,这些方法选择刺激的频率。例如,该刺激频率可以选自约1Hz、2Hz、3Hz、4Hz、5Hz、6Hz、7Hz、8Hz、9Hz、10Hz、15Hz、20Hz、25Hz、30Hz、35Hz、40Hz、45Hz或50Hz。在一些实施方式中,这些方法选择刺激的脉冲宽度。例如,该刺激的脉冲宽度可以选自约10μs、20μs、30μs、40μs、50μs、60μs、70μs、80μs、90μs、100μs、150μs、200μs、250μs、300μs、350μs、400μs、450μs、500μs、550μs、600μs、650μs、700μs、750μs、800μs、850μs、900μs、950μs或1ms。在一些实施方式中,这些方法选择刺激开和关时段的持续时间。例如,刺激开启和关闭时段的持续时间能够选自约0.1秒、0.5秒、1.5秒、2秒、2.5秒、3秒、3.5秒、4秒、4.5秒、5秒、10秒、20秒、30秒、40秒、50秒、1分钟、2分钟、3分钟、4分钟、5分钟、10分钟、15分钟、20分钟、30分钟、40分钟、45分钟、50分钟和1小时。该开和关时段能够具有相同的持续时间或不同的持续时间。
实验实施例
本发明参考以下实验实施例进一步详细描述。提供这些实施例仅出于举例说明的目的,并非旨在是限制性的,除非另有说明。因此,本发明决不应该解释为限于以下实施例,而应该解释为涵盖由于本文提供的教导而变得显而易见的任何和所有变型。
无需进一步描述,据信本领域普通技术人员能够使用前面的描述和以下举例说明性实施例制备和利用本发明的化合物并实践所要求保护的方法。因此,以下工作实施例专门指出了本发明的示例性实施方式,并且不应该解释为以任何方式限制本公开的其余部分。
口部运动失调导致的进食困难是早产或缺氧缺血性脑病(HIE)婴儿的首要问题。迷走神经刺激(VNS)能够增加神经可塑性,并且在与康复配对时能够增强运动学习。最近,据证明,非侵入式VNS能够使用一种称为经皮耳迷走神经刺激(taVNS)的新方法,经由电刺激迷走神经耳廓分支而实现。本研究的目标是开发一种使用肌电图(EMG)作为触发器将taVNS与来自吸吮的肌肉激活配对的闭环自动系统。该系统可以实现更好的吸吮和刺激配对,同时也减少了劳动强度。
这些研究旨在测试参考电极置位的最佳位置和与吮吸匹配的刺激的保真度。在较大规模的中试(图6中所示的实施例)中招收的2个早产儿中比较了三个不同的EMG电极置位(A,B,C),以优化自动化系统的特异性和灵敏度。使用左耳电极以低于感知阈值0.1mA、25Hz频率、500μs脉冲宽度,3.5秒训练时间递送触发刺激。这项研究的主要结果是特异性(刺激与可视吮吸正确配对,图7)和灵敏度(刺激期间触发或发生的可视吮吸,图8)。
位置A、B和C具有的平均特异性分别为49.3±31.8(n=3)、37.9±13.4(n=7)和58.3±18.5(n=6)。位置A、B和C具有的平均灵敏度分别为77±15.9(n=3)、82±13.8(n=7)和75.2±16.2(n=6)。电极位置C是可行的,并且耐受性更好。该位置产生了由真实可视吮吸引起的最高平均刺激率(60%),而同时最小化了非可视吮吸触发的刺激(40%)。所有位置似乎均以可视吮吸引起的约77%-81%的触发率等同实施。
这些结果表明,EMG电极位置C最有效,其中58%的刺激训练了与可视吮吸的正确配对,而同时保持对可视吮吸的良好敏感性。使用在闭环taVNS系统中的EMG是触发婴儿taVNS刺激的安全有效方法。
在患有脑成熟缺陷的早产儿或缺氧缺血性脑病(HIE)的足月儿中,进食困难是延迟出院的主要原因。无法完全实现口部进食可能是由于关闭了关键的神经可塑性发育窗口,或是由于HIE婴儿的明显脑损伤所致。当前的疗法限于由职业或言语治疗师每天喂食一次,和放置胃造口管(g-管)。
本研究监测了口部(PO)进食开始后20天婴儿的摄入量。平均49天进食失败的婴儿确定为g-管候选者,并招收入脑神经刺激试验(图9)。在中期分析中分析了14名婴儿(图10)。所有婴儿均为g-管候选者,入选前平均49天尝试口服喂食。根据以前的方案实施治疗(使用左耳电极以低于感知阈值0.1mA、25Hz频率,500μs脉宽,3.5秒训练时间,进行刺激)。57%的婴儿(14个中8个)达到了足够的PO摄入量(口服完全进食),这是临床上不需使用G-管就可以出院所要求的。结果表明,在超过一半的婴儿中,脑神经刺激促进了他们的康复,增强了神经可塑性,并促进了运动学习。
图11和图12描绘了响应者组和非响应者组的统计分析。图11表明刺激治疗之前和期间响应者的线性回归比较是显著不同的,使得斜率在治疗之后增加。图12表明刺激治疗之前和期间非响应者的线性回归比较没有显著差异。
对治疗候选者进行成像以监测治疗对大脑发育的影响。使用MRI扫描婴儿,治疗2-4周,然后再次扫描以研究白质束(tract)的变化。图13A和图13B证实,脑神经刺激对由响应者组(完全进食)中的各向异性分数(FA)和轴向弥散峰度(K
本文引用的每个和所有专利、专利申请和出版物的公开内容通过引用以其整体结合于本文中。尽管已经参考具体实施方式公开了本发明,但显而易见的是,本领域的其他技术人员可以设计出本发明的其他实施方式和变型而不脱离本发明的真实精神和范围。所附权利要求旨在解释为包括所有这样的实施方式和等同变体。
- 非侵入式脑神经疗法
- 用于非侵入式地确定至少一个血压值的方法、用于非侵入式地确定血压的测量设备和系统