一种便携式智能化施工用脚手架搭建辅助装置
文献发布时间:2023-06-19 10:49:34
技术领域
本发明涉及一种建筑设备,更具体的说是一种便携式智能化施工用脚手架搭建辅助装置。
背景技术
随着科技的发展时代的进步,越来越多的高端设备被引入到我们的生活和工作当中,在建筑行业中,需要对脚手架进行搭接以完成其他工作,而搭接过程往往需要人为对脚手架用铁丝进行绑扎或通过对脚手架的扣件上拧紧螺钉螺母来完成脚手架的搭接动作,这会很大程度的影响搭接效率,因此针对用来对接脚手架的一字扣,通过进行自动上料以及自动锁紧螺母等动作来节约手工锁紧螺母所产生的时间、人力成本的浪费以及安装问题,因此发明了一种便携式智能化施工用脚手架搭建辅助装置。
发明内容
本发明涉及一种建筑设备,更具体的说是一种便携式智能化施工用脚手架搭建辅助装置,通过外壳体安装其他的装置,扣件上料装置完成对一字扣的自动上料填装,螺钉锁紧装置实现螺钉的自动上料以及螺钉的锁紧动作,螺母上料装置实现螺母的自动上料以及在锁紧动作中对螺母进行固定,实现脚手架两钢管对接的功能。
为解决上述技术问题,一种便携式智能化施工用脚手架搭建辅助装置,包括外壳体、扣件上料装置、螺钉锁紧装置、螺母上料装置,通过外壳体安装其他的装置,扣件上料装置完成对一字扣的自动上料填装,螺钉锁紧装置实现螺钉的自动上料以及螺钉的锁紧动作,螺母上料装置实现螺母的自动上料以及在锁紧动作中对螺母进行固定,实现脚手架两钢管对接的功能,其特征在于:扣件上料装置固定安装在外壳体内部,螺钉锁紧装置转动安装在外壳体上,螺母上料装置转动安装在外壳体上。
作为本技术方案的进一步优化,本发明一种便携式智能化施工用脚手架搭建辅助装置所述的外壳体包括扣件储料盒、传动箱、螺钉传动箱、螺母传动箱,传动箱固定安装在扣件储料盒上,螺钉传动箱铰链安装在扣件储料盒上,螺母传动箱铰链安装在扣件储料盒上。
作为本技术方案的进一步优化,本发明一种便携式智能化施工用脚手架搭建辅助装置所述的扣件上料装置包括扣件电机、滑移齿轮一、传动轴一、传动轴二、传动轴三、正反转半锥齿一、锥齿轴一、花键轴一、滑移齿轮二、传动轴四、齿条一、齿轮一、花键轴二、滑移齿轮三、丝杠一、拨块、花键轴三、滑移齿轮四、齿条二、掰爪安装块、掰爪块、掰爪薄板、扣件上块、掰爪连接柱、扣件、扣件下块、上料块、上料丝杠、上料丝杠螺母,扣件电机固定安装在传动箱上,滑移齿轮一滑动安装在与扣件电机相连的花键轴上,传动轴一通过轴承转动安装在传动箱上,传动轴二通过轴承转动安装在传动箱上,传动轴三通过轴承转动安装在传动箱上,正反转半锥齿一固定安装在传动轴三上,锥齿轴一通过轴承转动安装在传动箱上,花键轴一通过轴承转动安装在传动箱上,滑移齿轮二滑动安装在花键轴一上,传动轴四通过轴承转动安装在传动箱上,齿条一滑动安装在传动箱上,齿轮一与齿条一啮合,齿轮一固定安装在传动轴四上,花键轴二通过轴承转动安装在传动箱上,滑移齿轮三滑动安装在花键轴二上,丝杠一通过轴承转动安装在传动箱上,拨块通过丝杠螺母螺纹安装在丝杠一上,花键轴三通过轴承转动安装在传动箱上,滑移齿轮四滑动安装在花键轴三上,齿条二与滑移齿轮四啮合,齿条二滑动安装在传动箱上,掰爪安装块固定安装在齿条二上,掰爪块固定安装在掰爪安装块上,掰爪块滑动安装在扣件上块上,掰爪块滑动安装在扣件下块上,掰爪薄板固定安装在掰爪块上,扣件上块铰链安装在传动箱内部,掰爪连接柱固定安装在掰爪块上,掰爪连接柱固定安装在掰爪薄板上,扣件固定安装在扣件上块内部,扣件固定安装在扣件下块上,扣件下块固定安装在传动箱内部,扣件下块铰链安装在扣件上块上,上料块固定安装在齿条一上,上料丝杠通过轴承转动安装在扣件储料盒内部,上料丝杠螺母螺纹安装在上料丝杠上。
作为本技术方案的进一步优化,本发明一种便携式智能化施工用脚手架搭建辅助装置所述的螺钉锁紧装置包括螺钉上料电机、滑移齿轮五、传动轴五、十字轴齿轮一、十字轴齿轮二、传动轴六、正反转半锥齿二、锥齿轴二、齿轮二、齿条三、升降块一、轴承座、螺钉锁紧电机、磁力块、传动轴七、正反转半锥齿三、锥齿轴三、螺钉上料丝杠、齿轮三、齿条四、辅助送钉块、螺钉弹夹、上钉口、上钉推块、锁紧顶头、螺钉、螺钉拧紧口,螺钉上料电机固定安装在螺钉传动箱内部,滑移齿轮五滑动安装在与螺钉上料电机相连的花键轴上,传动轴五通过轴承转动安装在螺钉传动箱上,十字轴齿轮一固定安装在传动轴五上,十字轴齿轮二与十字轴齿轮一啮合,传动轴六通过轴承转动安装在螺钉传动箱上,传动轴六固定安装在十字轴齿轮二上,正反转半锥齿二固定安装在传动轴六上,锥齿轴二与正反转半锥齿二啮合,锥齿轴二通过轴承转动安装在螺钉传动箱上,齿轮二固定安装在锥齿轴二上,齿条三与齿轮二啮合,齿条三滑动安装在螺钉传动箱内部,升降块一固定安装在齿条三上,轴承座固定安装在升降块一上,螺钉锁紧电机转动安装在轴承座上,螺钉锁紧电机固定安装在螺钉传动箱内部,磁力块固定安装在螺钉锁紧电机上,传动轴七通过轴承转动安装在螺钉传动箱上,正反转半锥齿三固定安装在传动轴七上,锥齿轴三与正反转半锥齿三啮合,螺钉上料丝杠通过丝杠螺母螺纹安装在螺钉弹夹上,齿轮三固定安装在锥齿轴三上,齿条四与齿轮三啮合,辅助送钉块滑动安装在螺钉弹夹上,螺钉弹夹固定安装在扣件上块上,上钉推块固定安装在螺钉上料丝杠上,锁紧顶头固定安装在磁力块上,螺钉固定安装在上钉推块上,螺钉拧紧口设置在扣件上块上。
作为本技术方案的进一步优化,本发明一种便携式智能化施工用脚手架搭建辅助装置所述的螺母上料装置包括螺母电机、花键轴四、滑移齿轮六、传动轴八、传动轴九、十字轴齿轮三、正反转半锥齿四、锥齿轴四、齿轮四、齿条五、升降块二、传动轴十、丝杠二、锥齿轴五、不完全齿轮、锥齿轴六、拨轮、摆杆、卡块、辅助螺母销、螺母推块、螺母丝杠、螺母上料口、螺母弹道、辅助销限位片、限位销孔、螺母锁紧口、螺母锁紧顶块、升降块安装块、螺母弹夹、丝杠螺母板,螺母电机固定安装在螺母传动箱上,花键轴四通过轴承转动安装在螺母传动箱上,滑移齿轮六滑动安装在花键轴四上,传动轴八通过轴承转动安装在螺母传动箱上,传动轴九通过轴承转动安装在螺母传动箱上,十字轴齿轮三固定安装在传动轴九上,正反转半锥齿四固定安装在传动轴九上,锥齿轴四通过轴承转动安装在螺母传动箱上,锥齿轴四与正反转半锥齿四啮合,齿轮四固定安装在锥齿轴四上,齿条五与齿轮四啮合,齿条五滑动安装在螺母传动箱内部,升降块二固定安装在齿条五上,传动轴十通过轴承转动安装在螺母传动箱上,丝杠二通过轴承转动安装在螺母传动箱上,丝杠二通过丝杠螺母螺纹安装在丝杠螺母板上,锥齿轴五通过轴承转动安装在螺母传动箱上,不完全齿轮固定安装在传动轴十上,锥齿轴六与锥齿轴五啮合,锥齿轴六通过轴承转动安装在螺母传动箱上,拨轮固定安装在锥齿轴六上,摆杆铰链安装在拨轮上,卡块滑动安装在丝杠螺母板上,螺母辅助销固定安装在卡块上,螺母辅助销滑动安装在螺母弹夹上,螺母推块固定安装在螺母丝杠上,螺母丝杠通过丝杠螺母螺纹安装在螺母弹夹上,螺母上料口设置在螺母弹夹上,螺母弹道设置在螺母弹夹上,辅助销限位片固定安装在螺母辅助销上,限位销孔设置在螺母弹夹上,螺母锁紧口设置在螺母锁紧顶块上,螺母锁紧顶块固定安装在升降块安装块上,升降块安装块固定安装在升降块二上,螺母弹夹固定安装在扣件下块上,丝杠螺母板滑动安装在螺母传动箱内部。
作为本技术方案的进一步优化,本发明一种便携式智能化施工用脚手架搭建辅助装置所述扣件上料装置齿条二、掰爪安装块、掰爪块、掰爪薄板、掰爪连接柱均有两个。
本发明一种便携式智能化施工用脚手架搭建辅助装置有益效果为:
本发明涉及一种建筑设备,更具体的说是一种便携式智能化施工用脚手架搭建辅助装置,实现了通过外壳体安装其他的装置,扣件上料装置完成对一字扣的自动上料填装,螺钉锁紧装置实现螺钉的自动上料以及螺钉的锁紧动作,螺母上料装置实现螺母的自动上料以及在锁紧动作中对螺母进行固定,实现脚手架两钢管对接的功能。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
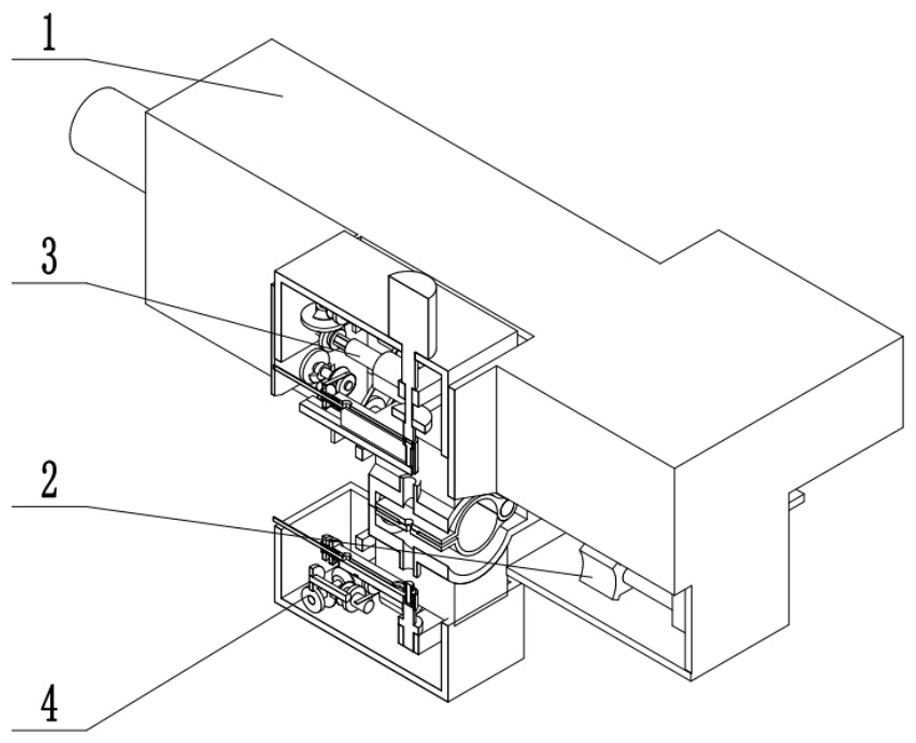
图1为本发明的整体结构示意图一。
图2为本发明的整体结构示意图二。
图3为本发明的整体结构示意图三。
图4为本发明的外壳体结构示意图。
图5为本发明的扣件上料装置结构示意图一。
图6为本发明的扣件上料装置结构示意图二。
图7为本发明的扣件上料装置结构示意图三。
图8为本发明的螺钉锁紧装置结构示意图一。
图9为本发明的螺钉锁紧装置结构示意图二。
图10为本发明的螺母上料装置结构示意图一。
图11为本发明的螺母上料装置结构示意图二。
图12为本发明的螺母上料装置结构示意图三。
图中:外壳体1;扣件储料盒1-1;传动箱1-2;螺钉传动箱1-3;螺母传动箱1-4;扣件上料装置2;扣件电机2-1;滑移齿轮一2-2;传动轴一2-3;传动轴二2-4;传动轴三2-5;正反转半锥齿一2-6;锥齿轴一2-7;花键轴一2-8;滑移齿轮二2-9;传动轴四2-10;齿条一2-11;齿轮一2-12;花键轴二2-13;滑移齿轮三2-14;丝杠一2-15;拨块2-16;花键轴三2-17;滑移齿轮四2-18;齿条二2-19;掰爪安装块2-20;掰爪块2-21;掰爪薄板2-22;扣件上块2-23;掰爪连接柱2-24;扣件2-25;扣件下块2-26;上料块2-27;上料丝杠2-28;上料丝杠螺母2-29;螺钉锁紧装置3;螺钉上料电机3-1;滑移齿轮五3-2;传动轴五3-3;十字轴齿轮一3-4;十字轴齿轮二3-5;传动轴六3-6;正反转半锥齿二3-7;锥齿轴二3-8;齿轮二3-9;齿条三3-10;升降块一3-11;轴承座3-12;螺钉锁紧电机3-13;磁力块3-14;传动轴七3-15;正反转半锥齿三3-16;锥齿轴三3-17;螺钉上料丝杠3-18;齿轮三3-19;齿条四3-20;辅助送钉块3-21;螺钉弹夹3-22;上钉口3-23;上钉推块3-24;锁紧顶头3-25;螺钉3-26;螺钉拧紧口3-27;螺母上料装置4;螺母电机4-1;花键轴四4-2;滑移齿轮六4-3;传动轴八4-4;传动轴九4-5;十字轴齿轮三4-6;正反转半锥齿四4-7;锥齿轴四4-8;齿轮四4-9;齿条五4-10;升降块二4-11;传动轴十4-12;丝杠二4-13;锥齿轴五4-14;不完全齿轮4-15;锥齿轴六4-16;拨轮4-17;摆杆4-18;卡块4-19;辅助螺母销4-20;螺母推块4-21;螺母丝杠4-22;螺母上料口4-23;螺母弹道4-24;辅助销限位片4-25;限位销孔4-26;螺母锁紧口4-27;螺母锁紧顶块4-28;升降块安装块4-29;螺母弹夹4-30;丝杠螺母板4-31。
具体实施方式
具体实施方式一:
下面结合图1、2、3、4、5、6、7、8、9、10、11、12为解决上述技术问题,一种便携式智能化施工用脚手架搭建辅助装置,包括外壳体1、扣件上料装置2、螺钉锁紧装置3、螺母上料装置4,通过外壳体1安装其他的装置,扣件上料装置2完成对一字扣的自动上料填装,螺钉锁紧装置3实现螺钉的自动上料以及螺钉的锁紧动作,螺母上料装置4实现螺母的自动上料以及在锁紧动作中对螺母进行固定,实现脚手架两钢管对接的功能,其特征在于:扣件上料装置2固定安装在外壳体1内部,螺钉锁紧装置3转动安装在外壳体1上,螺母上料装置4转动安装在外壳体1上。
具体实施方式二:
下面结合图1、2、3、4、5、6、7、8、9、10、11、12说明本实施方式,本实施方式对实施方式一作进一步说明,所述的外壳体1包括扣件储料盒1-1、传动箱1-2、螺钉传动箱1-3、螺母传动箱1-4,传动箱1-2固定安装在扣件储料盒1-1上,螺钉传动箱1-3铰链安装在扣件储料盒1-1上,螺母传动箱1-4铰链安装在扣件储料盒1-1上。
具体实施方式三:
下面结合图1、2、3、4、5、6、7、8、9、10、11、12说明本实施方式,本实施方式对实施方式一作进一步说明,所述的扣件上料装置2包括扣件电机2-1、滑移齿轮一2-2、传动轴一2-3、传动轴二2-4、传动轴三2-5、正反转半锥齿一2-6、锥齿轴一2-7、花键轴一2-8、滑移齿轮二2-9、传动轴四2-10、齿条一2-11、齿轮一2-12、花键轴二2-13、滑移齿轮三2-14、丝杠一2-15、拨块2-16、花键轴三2-17、滑移齿轮四2-18、齿条二2-19、掰爪安装块2-20、掰爪块2-21、掰爪薄板2-22、扣件上块2-23、掰爪连接柱2-24、扣件2-25、扣件下块2-26、上料块2-27、上料丝杠2-28、上料丝杠螺母2-29,装填完毕后,打开扣件电机2-1,扣件电机上的滑移齿轮一2-2与传动轴一2-3上的齿轮啮合,并通过传动轴一2-3上的带轮传到上料丝杠2-28上,此时上料丝杠螺母2-29推动扣件2-25向上料块2-27移动,当扣件2-25推入上料块2-27后,传动轴一2-3通过带轮传动至花键轴一2-8,滑移齿轮二2-9与滑移齿轮三2-14啮合并且滑移齿轮三2-14与传动轴四2-10上的齿轮啮合,带动齿轮一2-12与齿条一2-11啮合,带动上料块2-27前推,当到达既定位置后,滑移齿轮三2-14与传动轴四2-10上的齿轮脱开,与丝杠一2-15 上的齿轮啮合,带动拨块2-16向上料块2-27方向进给,将扣件2-25推入扣合的扣件上块2-23与扣件下块2-26当中,完成一次装填,传动轴一2-3通过带轮将动力传至花键轴三2-17,滑移齿轮四2-18与齿条二2-19啮合带动掰爪薄板2-22插入至扣件2-25的缝隙当中,随后滑移齿轮一2-2与传动轴二2-4上的齿轮啮合,传动轴二2-4上的十字轴齿轮与传动轴三2-5上的十字轴齿轮啮合,带动正反转半锥齿一2-6与锥齿轴一2-7啮合,锥齿轴一2-7通过带轮带动扣件上块2-23上的合页轴转动,使扣件上块2-23上翻,将扣件2-25打开,此时将设备放置在两待对接的钢管上,重新启动电源,扣件电机2-1反转带动扣件上块2-23重新扣合,且掰爪薄板2-22回退,使扣件2-25的螺纹孔保持畅通,扣件电机2-1固定安装在传动箱1-2上,滑移齿轮一2-2滑动安装在与扣件电机2-1相连的花键轴上,传动轴一2-3通过轴承转动安装在传动箱1-2上,传动轴二2-4通过轴承转动安装在传动箱1-2上,传动轴三2-5通过轴承转动安装在传动箱1-2上,正反转半锥齿一2-6固定安装在传动轴三2-5上,锥齿轴一2-7通过轴承转动安装在传动箱1-2上,花键轴一2-8通过轴承转动安装在传动箱1-2上,滑移齿轮二2-9滑动安装在花键轴一2-8上,传动轴四2-10通过轴承转动安装在传动箱1-2上,齿条一2-11滑动安装在传动箱1-2上,齿轮一2-12与齿条一2-11啮合,齿轮一2-12固定安装在传动轴四2-10上,花键轴二2-13通过轴承转动安装在传动箱1-2上,滑移齿轮三2-14滑动安装在花键轴二2-13上,丝杠一2-15通过轴承转动安装在传动箱1-2上,拨块2-16通过丝杠螺母螺纹安装在丝杠一2-15上,花键轴三2-17通过轴承转动安装在传动箱1-2上,滑移齿轮四2-18滑动安装在花键轴三2-17上,齿条二2-19与滑移齿轮四2-18啮合,齿条二2-19滑动安装在传动箱1-2上,掰爪安装块2-20固定安装在齿条二2-19上,掰爪块2-21固定安装在掰爪安装块2-20上,掰爪块2-21滑动安装在扣件上块2-23上,掰爪块2-21滑动安装在扣件下块2-26上,掰爪薄板2-22固定安装在掰爪块2-21上,扣件上块2-23铰链安装在传动箱1-2内部,掰爪连接柱2-24固定安装在掰爪块2-21上,掰爪连接柱2-24固定安装在掰爪薄板2-22上,扣件2-25固定安装在扣件上块2-23内部,扣件2-25固定安装在扣件下块2-26上,扣件下块2-26固定安装在传动箱1-2内部,扣件下块2-26转动安装在扣件上块2-23上,上料块2-27固定安装在齿条一2-11上,上料丝杠2-28通过轴承转动安装在扣件储料盒1-1内部,上料丝杠螺母2-29螺纹安装在上料丝杠2-28上。
具体实施方式四:
下面结合图1、2、3、4、5、6、7、8、9、10、11、12说明本实施方式,本实施方式对实施方式二作进一步说明,所述的螺钉锁紧装置3包括螺钉上料电机3-1、滑移齿轮五3-2、传动轴五3-3、十字轴齿轮一3-4、十字轴齿轮二3-5、传动轴六3-6、正反转半锥齿二3-7、锥齿轴二3-8、齿轮二3-9、齿条三3-10、升降块一3-11、轴承座3-12、螺钉锁紧电机3-13、磁力块3-14、传动轴七3-15、正反转半锥齿三3-16、锥齿轴三3-17、螺钉上料丝杠3-18、齿轮三3-19、齿条四3-20、辅助送钉块3-21、螺钉弹夹3-22、上钉口3-23、上钉推块3-24、锁紧顶头3-25、螺钉3-26、螺钉拧紧口3-27,将一字扣装填在扣件出料盒1-1内部,并将螺钉通过上钉口3-23装填至螺钉弹夹3-22当中,此时打开螺钉上料电机3-1,滑移齿轮五3-2与传动轴七3-15上的齿轮啮合,通过螺钉上料电机3-1的正反转带动螺钉上料丝杠3-18转动,上钉推块3-24往复运动,将上一螺钉向前顶随后回退,螺钉上料电机3-1与螺母电机4-1同时运作,螺钉上料电机3-1通过滑移齿轮五3-2与正反转半锥齿三3-16上的齿轮啮合,带动传动轴七3-15与锥齿轴三3-17啮合,螺钉上料丝杠3-18与齿轮二3-9啮合带动辅助送钉块3-21往复运动,且正反转半锥齿三3-16通过带轮将动力传递给螺钉上料丝杠3-18,上钉推块3-24推动螺钉向前至锁紧顶头3-25处,滑移齿轮五3-2与传动轴五3-3上的齿轮啮合,带动十字轴齿轮一3-4与十字轴齿轮二3-5啮合,传动轴六3-6与锥齿轴二3-8啮合带动齿轮二3-9与齿条三3-10啮合,从而使得轴承座3-12下降,磁力块3-14将螺钉吸起,并继续通过螺钉拧紧口3-27将螺钉运送至锁紧顶头3-25的通孔上方,随后螺钉锁紧电机3-13开启带动磁力块3-14转动将螺钉与螺母锁紧,完成扣件安装后上钉口3-23再次打开,取下整个设备完成一次对接,螺钉上料电机3-1固定安装在螺钉传动箱1-3内部,滑移齿轮五3-2滑动安装在与螺钉上料电机3-1相连的花键轴上,传动轴五3-3通过轴承转动安装在螺钉传动箱1-3上,十字轴齿轮一3-4固定安装在传动轴五3-3上,十字轴齿轮二3-5与十字轴齿轮一3-4啮合,传动轴六3-6通过轴承转动安装在螺钉传动箱1-3上,传动轴六3-6固定安装在十字轴齿轮二3-5上,正反转半锥齿二3-7固定安装在传动轴六3-6上,锥齿轴二3-8与正反转半锥齿二3-7啮合,锥齿轴二3-8通过轴承转动安装在螺钉传动箱1-3上,齿轮二3-9固定安装在锥齿轴二3-8上,齿条三3-10与齿轮二3-9啮合,齿条三3-10滑动安装在螺钉传动箱1-3内部,升降块一3-11固定安装在齿条三3-10上,轴承座3-12固定安装在升降块一3-11上,螺钉锁紧电机3-13转动安装在轴承座3-12上,螺钉锁紧电机3-13固定安装在螺钉传动箱1-3内部,磁力块3-14固定安装在螺钉锁紧电机3-13上,传动轴七3-15通过轴承转动安装在螺钉传动箱1-3上,正反转半锥齿三3-16固定安装在传动轴七3-15上,锥齿轴三3-17与正反转半锥齿三3-16啮合,螺钉上料丝杠3-18通过丝杠螺母螺纹安装在螺钉弹夹3-22上,齿轮三3-19固定安装在锥齿轴三3-17上,齿条四3-20与齿轮三3-19啮合,辅助送钉块3-21滑动安装在螺钉弹夹3-22上,螺钉弹夹3-22固定安装在扣件上块2-23上,上钉推块3-24固定安装在螺钉上料丝杠3-18上,锁紧顶头3-25固定安装在磁力块3-14上,螺钉3-26固定安装在上钉推块3-24上,螺钉拧紧口3-27设置在扣件上块2-23上。
具体实施方式五:
下面结合图1、2、3、4、5、6、7、8、9、10、11、12说明本实施方式,本实施方式对实施方式一作进一步说明,所述的螺母上料装置4包括螺母电机4-1、花键轴四4-2、滑移齿轮六4-3、传动轴八4-4、传动轴九4-5、十字轴齿轮三4-6、正反转半锥齿四4-7、锥齿轴四4-8、齿轮四4-9、齿条五4-10、升降块二4-11、传动轴十4-12、丝杠二4-13、锥齿轴五4-14、不完全齿轮4-15、锥齿轴六4-16、拨轮4-17、摆杆4-18、卡块4-19、辅助螺母销4-20、螺母推块4-21、螺母丝杠4-22、螺母上料口4-23、螺母弹道4-24、辅助销限位片4-25、限位销孔4-26、螺母锁紧口4-27、螺母锁紧顶块4-28、升降块安装块4-29、螺母弹夹4-30、丝杠螺母板4-31,将螺母通过螺母上料口4-23装填至螺母弹夹4-30当中,其动力由螺母电机4-1产生,螺母电机4-1通过带轮将动力传至花键轴四4-2,此时滑移齿轮六4-3被拨动与螺母丝杠4-22上的齿轮啮合,带动螺母推块4-21在螺母弹道4-24中往复,螺母电机4-1通过带轮将动力传至花键轴四4-2,滑移齿轮六4-3先与4-22上的齿轮啮合,带动螺母弹道4-24顶着螺母前进至限位销孔4-26处,螺母丝杠4-22通过带轮将动力传至传动轴十4-12上,不完全齿轮4-15与锥齿轴五4-14上的齿轮啮合,带动锥齿轴五4-14与锥齿轴六4-16啮合,拨轮4-17带动摆杆4-18上滑带动摆杆4-18拨动辅助螺母销4-20抬起,不完全齿轮4-15与丝杠二4-13上的齿轮啮合,带动丝杠螺母板4-31后移,同时辅助螺母销4-20插入螺母当中,并通过反转带动丝杠螺母板4-31复位,辅助螺母销4-20重新抬起并且带动丝杠螺母板4-31再次向不完全齿轮4-15方向移动,此时滑移齿轮六4-3与传动轴八4-4啮合,传动轴八4-4与十字轴齿轮三4-6啮合,正反转半锥齿四4-7与锥齿轴四4-8啮合,齿轮四4-9与齿条五4-10啮合带动升降块二4-11上移,则螺母锁紧顶块4-28顶着螺母上移至扣件下块的进料口,并运送至锁紧顶头3-25的通孔下方,螺母电机固定安装在螺母传动箱1-4上,花键轴四4-2通过轴承转动安装在螺母传动箱1-4上,滑移齿轮六4-3滑动安装在花键轴四4-2上,传动轴八4-4通过轴承转动安装在螺母传动箱1-4上,传动轴九4-5通过轴承转动安装在螺母传动箱1-4上,十字轴齿轮三4-6固定安装在传动轴九4-5上,正反转半锥齿四4-7固定安装在传动轴九4-5上,锥齿轴四4-8通过轴承转动安装在螺母传动箱1-4上,锥齿轴四4-8与正反转半锥齿四4-7啮合,齿轮四4-9固定安装在锥齿轴四4-8上,齿条五4-10与齿轮四4-9啮合,齿条五4-10滑动安装在螺母传动箱1-4内部,升降块二4-11固定安装在齿条五4-10上,传动轴十4-12通过轴承转动安装在螺母传动箱1-4上,丝杠二4-13通过轴承转动安装在螺母传动箱1-4上,丝杠二4-13通过丝杠螺母螺纹安装在丝杠螺母板4-31上,锥齿轴五4-14通过轴承转动安装在螺母传动箱1-4上,不完全齿轮4-15固定安装在传动轴十4-12上,锥齿轴六4-16与锥齿轴五4-14啮合,锥齿轴六4-16通过轴承转动安装在螺母传动箱1-4上,拨轮4-17固定安装在锥齿轴六4-16上,摆杆4-18铰链安装在拨轮4-17上,卡块4-19滑动安装在丝杠螺母板4-31上,螺母辅助销4-20固定安装在卡块4-19上,螺母辅助销4-20滑动安装在螺母弹夹4-30上,螺母推块4-21固定安装在螺母丝杠4-22上,螺母丝杠4-22通过丝杠螺母螺纹安装在螺母弹夹4-30上,螺母上料口4-23设置在螺母弹夹4-30上,螺母弹道4-24设置在螺母弹夹4-30上,辅助销限位片4-25固定安装在螺母辅助销4-20上,限位销孔4-26设置在螺母弹夹4-30上,螺母锁紧口4-27设置在螺母锁紧顶块4-28上,螺母锁紧顶块4-28固定安装在升降块安装块4-29上,升降块安装块4-29固定安装在升降块二4-11上,螺母弹夹4-30固定安装在扣件下块2-26上,丝杠螺母板4-31滑动安装在螺母传动箱1-4内部。
具体实施方式六:
下面结合图1、2、3、4、5、6、7、8、9、10、11、12说明本实施方式,本实施方式对实施方式三作进一步说明,所述扣件上料装置2齿条二2-19、掰爪安装块2-20、掰爪块2-21、掰爪薄板2-22、掰爪连接柱2-24均有两个。
本发明的工作原理是:
一种便携式智能化施工用脚手架搭建辅助装置的工作原理是,在使用前先检查好装置间的连接情况是否符合要求,将一字扣装填在扣件出料盒1-1内部,并将螺钉通过上钉口3-23装填至螺钉弹夹3-22当中,此时打开螺钉上料电机3-1,滑移齿轮五3-2与传动轴七3-15上的齿轮啮合,通过螺钉上料电机3-1的正反转带动螺钉上料丝杠3-18转动,上钉推块3-24往复运动将上一螺钉前顶后回退,此时装填下一螺钉,随后将螺母通过螺母上料口4-23装填至螺母弹夹4-30当中,其动力由螺母电机4-1产生,螺母电机4-1通过带轮带动花键轴四4-2,此时滑移齿轮六4-3被拨动与螺母丝杠4-22上的齿轮啮合,带动螺母推块4-21在螺母弹道4-24中往复,装填完毕后打开扣件电机2-1,扣件电机上的滑移齿轮一2-2与传动轴一2-3上的齿轮啮合,并通过传动轴一2-3上的带轮传到上料丝杠2-28上,此时上料丝杠螺母2-29推动扣件2-25向上料块2-27移动,当扣件2-25推入上料块2-27后,传动轴一2-3通过带轮传动至花键轴一2-8,滑移齿轮二2-9与滑移齿轮三2-14啮合并且滑移齿轮三2-14与传动轴四2-10上的齿轮啮合,带动齿轮一2-12与齿条一2-11啮合,带动上料块2-27前推,当到达既定位置后,滑移齿轮三2-14与传动轴四2-10上的齿轮脱开,与丝杠一2-15 上的齿轮啮合,带动拨块2-16向上料块2-27方向进给,将扣件2-25推入扣合的扣件上块2-23与扣件下块2-26当中,完成一次装填,传动轴一2-3通过带轮将动力传至花键轴三2-17,滑移齿轮四2-18与齿条二2-19啮合带动掰爪薄板2-22插入至扣件2-25的缝隙当中,随后滑移齿轮一2-2与传动轴二2-4上的齿轮啮合,传动轴二2-4上的十字轴齿轮与传动轴三2-5上的十字轴齿轮啮合,带动正反转半锥齿一2-6与锥齿轴一2-7啮合,锥齿轴一2-7通过带轮带动扣件上块2-23上的合页轴转动,使扣件上块2-23上翻,将扣件2-25打开,此时将设备放置在两待对接的钢管上,重新启动电源,扣件电机2-1反转带动扣件上块2-23重新扣合,且掰爪薄板2-22回退,使扣件2-25的螺纹孔保持畅通,此时螺钉上料电机3-1与螺母电机4-1同时运作,螺钉上料电机3-1通过滑移齿轮五3-2与正反转半锥齿三3-16上的齿轮啮合,带动传动轴七3-15与锥齿轴三3-17啮合,螺钉上料丝杠3-18与齿轮二3-9啮合带动辅助送钉块3-21往复运动,且正反转半锥齿三3-16通过带轮将动力传递给螺钉上料丝杠3-18,上钉推块3-24推动螺钉向前至锁紧顶头3-25处,滑移齿轮五3-2与传动轴五3-3上的齿轮啮合,带动十字轴齿轮一3-4与十字轴齿轮二3-5啮合,传动轴六3-6与锥齿轴二3-8啮合带动齿轮二3-9与齿条三3-10啮合,从而使得轴承座3-12下降,磁力块3-14将螺钉吸起,并继续通过螺钉拧紧口3-27将螺钉运送至锁紧顶头3-25的通孔上方,同时螺母电机4-1通过带轮将动力传至花键轴四4-2,滑移齿轮六4-3先与螺母丝杠4-22上的齿轮啮合,带动螺母弹道4-24顶着螺母前进至限位销孔4-26处,螺母丝杠4-22通过带轮将动力传至传动轴十4-12上,不完全齿轮4-15与锥齿轴五4-14上的齿轮啮合,带动锥齿轴五4-14与锥齿轴六4-16啮合,拨轮4-17带动摆杆4-18上滑带动摆杆4-18拨动辅助螺母销4-20抬起,不完全齿轮4-15与丝杠二4-13上的齿轮啮合,带动丝杠螺母板4-31后移,同时辅助螺母销4-20插入螺母当中,并通过反转带动丝杠螺母板4-31复位,辅助螺母销4-20重新抬起并且带动丝杠螺母板4-31再次向不完全齿轮4-15方向移动,此时滑移齿轮六4-3与传动轴八4-4啮合,传动轴八4-4与十字轴齿轮三4-6啮合,正反转半锥齿四4-7与锥齿轴四4-8啮合,齿轮四4-9与齿条五4-10啮合带动升降块二4-11上移,则螺母锁紧顶块4-28顶着螺母上移至扣件下块的进料口,并运送至锁紧顶头3-25的通孔下方,随后螺钉锁紧电机3-13开启带动磁力块3-14转动将螺钉与螺母锁紧,完成扣件安装后上钉口3-23再次打开,取下整个设备完成一次对接。
当然,上述说明并非对本发明的限制,本发明也不仅限于述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 一种便携式智能化施工用脚手架搭建辅助装置
- 一种便携式施工用脚手架搭建辅助装置