果蔬去皮装置及方法
文献发布时间:2023-06-19 10:58:46
技术领域
本发明涉及人工智能技术领域,特别地涉及一种果蔬去皮装置及方法。
背景技术
对姜、萝卜等果蔬,在食用或者烹饪前,人们一般会进行皮和去除发黄、发黑部分的工作。为了方便人们的生活,市面出现了多样的去皮器,但是这些去皮装置仅仅是简单地将果蔬进行固定后用刀具将其去皮操作,而不能对果蔬的进行自动抓取以及对不同种类、大小的果蔬进行自动调整参数,因此目前的去皮器的自动化程度还有待提高。
发明内容
为了解决上述全部或部分问题,本发明提供一种果蔬去皮装置及方法,其可实现自动化地去除果蔬的外皮。
根据本发明的第一个方面,本发明提供一种果蔬去皮装置,包括:
第一机械手,其用于固定至少一种果蔬原料;
第二机械手,其用于对所述第一机械手固定的果蔬原料进行处理以获得能够直接食用或烹饪的果蔬;以及
人工智能系统,其分别与所述第一机械手和所述第二机械手相连,用于控制所述第一机械手和所述第二机械手执行相应的操作。
在一个实施方式中,所述第一机械手包括第一臂以及第一前端,所述第一前端与所述第一臂转动连接,所述第一前端用于固定果蔬原料,所述第一臂用于将所述第一前端移至操作台或移出操作台。
在一个实施方式中,所述第二机械手包括第二臂以及第二前端,所述第二前端与所述第二臂转动连接,所述第二臂可带动所述第二前端进行升降,所述第二前端用于对固定于所述第一前端的果蔬原料进行处理以获得能够直接食用或烹饪的果蔬。
在一个实施方式中,所述第二前端包括冲洗部以及切削部,所述冲洗部用于对固定于所述第一前端的果蔬原料和/或用于对操作台进行清扫操作,所述切削部用于对果蔬原料进行切削操作。
在一个实施方式中,所述第一机械手远离果蔬原料的端部以及所述第二机械手远离果蔬原料的端部分别与所述操作台转动连接。
在一个实施方式中,所述人工智能系统至少包括分别设置在所述操作台的上端的图像识别装置和定位装置;所述图像识别装置用于采集果蔬原料的图像信息,所述定位装置用于采集果蔬原料的位置信息。
在一个实施方式中,还包括第三机械手,所述第三机械手与所述操作台转动相连,所述第三机械手用于将能够直接食用或烹饪的果蔬转移出所述操作台。
在一个实施方式中,还包括设置在所述操作台外部的真空包装系统,所述第三机械手将能够直接食用或烹饪的果蔬转移至所述真空包装系统中。
在一个实施方式中,所述第一机械手和所述第二机械手的数量均为一个或多个。
根据本发明的第一个方面,本发明提供一种果蔬去皮方法,采用上述的果蔬去皮装置进行去皮,其包括以下步骤:
人工智能系统控制第一机械手固定至少一种果蔬原料,并将其转移至操作台上指定位置;
人工智能系统控制第二机械手对第一机械手上固定的果蔬原料进行操作,以获得能够直接食用或烹饪的果蔬;
人工智能系统控制第一机械手将操作完成后的果蔬放置在操作台上指定位置。
在一个实施方式中,人工智能系统控制第二机械手对第一机械手上固定的果蔬原料进行操作包括:
人工智能系统控制第二机械手对第一机械手上固定的果蔬原料进行清扫操作,以去除果蔬原料上的泥土和杂物;
人工智能系统控制第二机械手对第一机械手上固定的果蔬原料进行削皮操作,以去除果蔬原料的外皮;
人工智能系统控制第二机械手对第一机械手上固定的果蔬原料进行切除操作,以去除果蔬原料上不符合质量要求的部分。
与现有技术相比,本发明的优点在于:通过人工智能系统控制第一机械手和第二机械手执行相应的操作,能够自动抓取果蔬原料,并且能够针对不同种类、不同大小的果蔬原料进行相应地调整,从而以不同的参数进行相应的操作,从而实现自动化去除果蔬的外皮的目的。
附图说明
在下文中将基于实施例并参考附图来对本发明进行更详细的描述。
图1是本发明的实施例中适于家用的果蔬去皮装置的结构示意图;
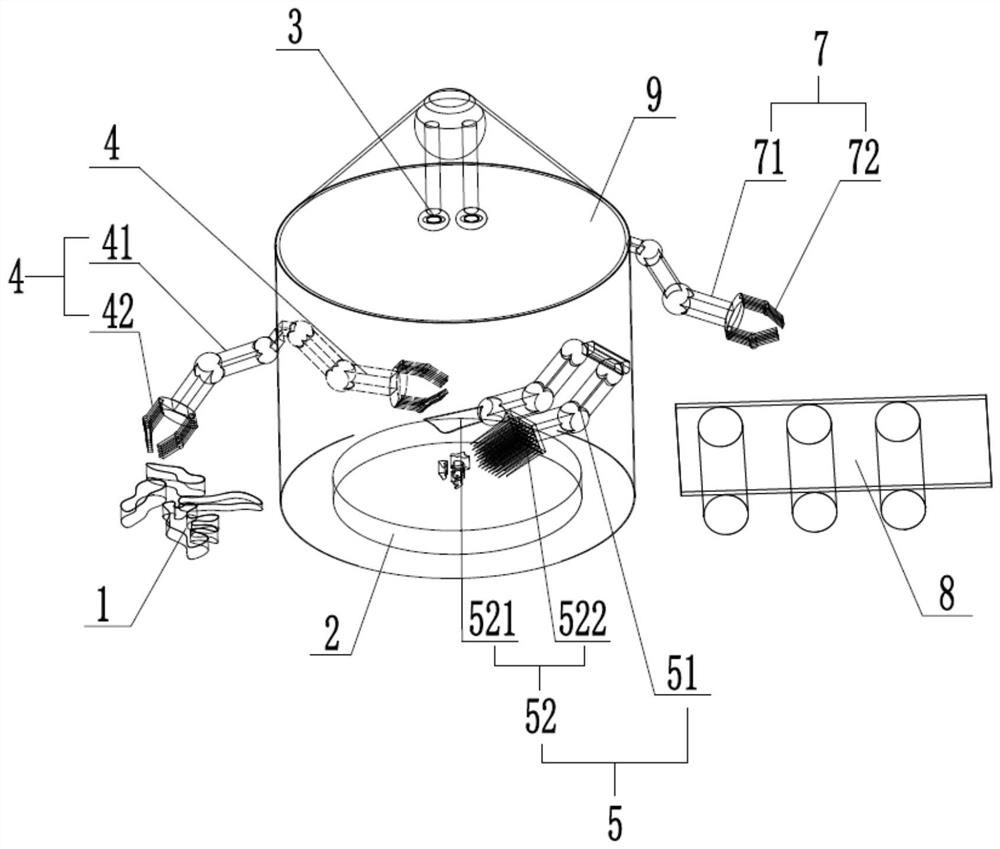
图2是本发明的实施例中适于流水线生产的果蔬去皮装置的结构示意图。
附图说明:
1-果蔬原料;2-砧板;3-人工智能系统;
4-第一机械手;41-第一臂;42-第一前端;
5-第二机械手;51-第二臂;52-第二前端;521-切削部;522-冲洗部;
7-第三机械手;71-第三臂;72-第三前端;
8-真空包装系统;9-操作台。
具体实施方式
下面将结合附图对本发明作进一步说明。
根据本发明的第一个方面,如图1和2所示,本发明提供一种果蔬去皮装置,尤其适用于对姜、萝卜等蔬菜以及苹果、梨等水果进行去皮的装置。
具体来说,如图所示,本发明的适用于家用的果蔬去皮装置包括第一机械手4、第二机械手5和人工智能系统3,其中,第一机械手4用于固定至少一种果蔬原料1,第二机械手4用于对第一机械手4上固定的果蔬原料1进行处理以获得能够直接食用或烹饪的果蔬;人工智能系统3分别与第一机械手4和第二机械手5相连,用于控制第一机械手4和第二机械手5执行相应的操作。
其中,第一机械手4为能够实现抓住果蔬的功能、握住果蔬的功能和拉扯果蔬的功能中一种或几种功能的机械手。具体地,第一机械手4包括第一臂41以及第一前端42,第一前端42与第一臂41转动连接,第一前端42用于固定果蔬原料,第一臂41用于将第一前端42移至操作台9或移出操作台9。
如图1所示,用实线表示的第一机械手4示出了其处于操作台9外部的第一位置,在第一位置,第一机械手4的第一前端42能够抓取果蔬原料1;用虚线表示的第一机械手4示出了其处于操作台9外部的第二位置,在第二位置,第一机械手4的第一前端42抓住果蔬原料1以使第二机械手5进行处理。其中,第一机械手4的第一臂41与操作台9转动连接,以使其能够从第一位置转移至第二位置,从而使果蔬原料1可以从操作台9外转移至操作台9上。
人工智能系统3根据分析后指定合理的操作流程,以控制第一机械手4在第一位置时抓取果蔬原料1某个位置,并控制其沿规定的路径从第一位置转移至第二位置,以便使第二机械手5进行操作。人工智能系统3控制第一机械手4进行抓取和转移的控制方法可采用现有技术中的控制方法,本发明对此不再赘述。
此外,第二机械手5为能够实现削皮功能、切割功能和清扫功能一种或几种功能的机械手。具体地,第二机械手5包括第二臂51以及第二前端52,第二前端52与第二臂51转动连接,第二臂51可带动第二前端52进行升降,第二前端52用于对固定于第一前端41的果蔬原料1进行处理以获得能够直接食用或烹饪的果蔬。
如图1所示,第二臂51与操作台9转动连接,其沿与操作台9相连处进行转动时,能够带动第二前端52上下运动,从而实现螺旋式去皮的操作。
进一步地,第二前端52包括冲洗部522以及切削部521,其中,冲洗部522用于对果蔬原料1和/或操作台9进行清扫操作,具体地,冲洗部522包括冲洗喷头和冲洗刷头,冲洗喷头向果蔬原料1上喷水,冲洗刷头对果蔬原料1进行洗刷,以去除果蔬原料1的外皮上粘着的泥土和杂物等。此外,冲洗部522还可对操作台9进行冲洗操作,以便将切削后的碎屑等吹落操作台9。可以理解地,操作台9的下方相应地设置有碎屑收集装置,以便收集切削完成后残留的外皮、碎屑等。
切削部521用于对果蔬原料1进行切削操作,其包括切割刀,其用于以螺旋的方式取出果蔬原料1的外皮,以及去除果蔬原料1上不符合质量要求的部分(例如发黄或发黑的部分)。
人工智能系统3能够控制第二机械手5对果蔬原料1进行操作,例如切削果蔬原料1的什么部位以及采用何种方式进行切削等。人工智能系统3控制第二机械手5进行清扫和切削的控制方法可采用现有技术中的控制方法,本发明对此不再赘述。
如图1所示,第一机械手4位于第二位置时,其将果蔬原料1固定住,第二机械手5的冲洗部522对果蔬原料1进行清扫操作,以去除果蔬原料上的泥土和杂物。切削部521用于对果蔬原料进行削皮操作和切割操作,以去除果蔬原料的外皮和果蔬原料1上不符合质量要求的部分(例如发黄或发黑的部分)。
其中,第二前端52与第二臂51转动连接,从而实现切削部521旋转切削的操作,此外,第二臂51可带动第二前端52进行升降操作,从而实现切削部521从上之下或从下至上的螺旋式切削,从而将果蔬原料1上的外皮去除。
人工智能系统3至少包括图像识别装置和定位装置。其中,图像识别装置用于采集果蔬原料的图像信息,其能够识别果蔬的种类以及果蔬上不符合质量要求的部分(例如发黄或发黑的部分);定位装置用于采集果蔬原料的位置信息,从而使第一机械手4能够准确地抓取到果蔬,以及使第一机械手4将果蔬转移至固定的位置,并能够使第二机械手5准确地对第一机械手4上固定的果蔬原料1进行处理。
进一步地,图像识别装置和定位装置设置在操作台9的上端,此外,还可根据线路板等各种原因调整人工智能系统3的位置。第一机械手4和第二机械手5在操作台9底端的砧板2上进行操作。此外,第一机械手4和第二机械手5也可根据工业设计要求、用户需求和美观等要求更改其设置位置。
其中,操作台9可以是杯形容器,也可根据工业设计要求、用户需求和美观等要求更改形状及材质。
上述实施例中,第一机械手4和第二机械手5的数量均为一个,以适合家用。
下面以去姜皮为例,对本发明的果蔬去皮装置进行详细地说明。
人工智能系统3控制第一机械手4抓握住带皮的姜,将其从第一位置转移至第二位置,并控制第二机械手5以螺旋式削除姜皮,并通过人工智能系统3的图像识别系统检测姜上是否有发黄、发黑等不符合质量要求的部分,若有,则控制第二机械手5将上述发黄、发黑的部分。
如图2所示,针对流水线操作,本发明的果蔬去皮装置还包括第三机械手7,第三机械手7与操作台9转动相连,第三机械手7用于将能够直接食用或烹饪的果蔬转移出操作台。第三机械手7与第一机械手4的设置方式类似,第三机械手7包括第三臂71以及与第三臂71转动连接的第三前端72,其中第三前端72用于抓取砧板2上处理好的果蔬,通过第三臂71的转动,使其从操作台9上转移至操作台9的外部。
进一步地,还包括设置在操作台9外部的真空包装系统8,第三机械手7将能够直接食用或烹饪的果蔬转移至真空包装系统8中,从而将处理好的果蔬分开小包并将其进行独立真空包装。
本实施例中,第一机械手4和第二机械手5的数量均为多个,以适用于商业用途,其具体数量可根据工业设计要求、用户需求和美观等要求进行设置。并且可通过人工智能系统3控制不同的机械手分别进行相应的操作,使机械手不断工作以实现流水线作业。
根据本发明的第二个方面,本发明提供一种果蔬去皮方法,采用上述的果蔬去皮装置进行去皮,包括以下步骤:
第一步,人工智能系统3控制第一机械手4固定至少一种果蔬原料1,并将其转移至操作台9上指定位置。具体地,人工智能系统3控制第一机械手4在第一位置抓握住果蔬原料1,并按照预设的路线从第一位置转移至第二位置。
第二步,人工智能系统3控制第二机械手5对第一机械手4上固定的果蔬原料1进行操作,以获得能够直接食用或烹饪的果蔬。
具体地,首先,人工智能系统3控制第二机械手5对第一机械手4上固定的果蔬原料1进行清扫操作,以去除果蔬原料1上的泥土和杂物;其次,人工智能系统3控制第二机械手5对第一机械手4上固定的果蔬原料1进行削皮操作,以去除果蔬原料1的外皮;最后,人工智能系统3控制第二机械手5对第一机械手4上固定的果蔬原料1进行切除操作,以去除果蔬原料1上不符合质量要求的部分。
第三步,人工智能系统3控制第一机械手4将操作完成后的果蔬放置在操作台9上指定位置。
第四步,人工智能系统4控制第三机械手7将操作台9上指定位置的果蔬转移至真空包装系统8中,从而将处理好的果蔬分开小包并将其进行独立真空包装。
需要说明的是,上述操作中第四步为可选的步骤,针对家用的果蔬去皮装置,可以取消第四步。
虽然已经参考优选实施例对本发明进行了描述,但在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,各个实施例中所提到的各项技术特征均可以任意方式组合起来。本发明并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
- 拨料去皮装置及具有该装置的果蔬去皮机
- 果蔬去皮装置及方法