机场跑道异物检测装置及方法
文献发布时间:2023-06-19 11:02:01
技术领域
本发明涉及雷达检测技术领域,具体来说涉及一种机场跑道异物检测装置及方法。
背景技术
机场跑道道面异物检测是保证飞机安全起降的极为重要环节,对于单日起降架次少的小型机场跑道,由于工作窗口期较长可以采用人工巡检的方式。但对于大型机场单日起降架次多,起降航班的时间间隔只有几分钟,这时必须采用道面探测设备进行实时检测,保证飞机安全进港出港。
我国是人口大国,也是出行大国。我国民用大中型机场众多,但在目前国内外民航市场上,针对跑道异物的检测方式多为单一的边灯式雷达或者人工巡检。人工巡检的方式不仅费时费力,还容易存在检测不准确的情况;而边灯式雷达探测距离短,往往一条跑道就需要几十部雷达,成本过高。
发明内容
本发明旨在解决现有的机场跑道异物检测方法存在检测准确度低以及成本较高问题,提出一种机场跑道异物检测装置及方法。
本发明解决上述技术问题所采用的技术方案是:机场跑道异物检测装置,包括:雷达模块、驱动模块、塔架和上位机,所述雷达模块和驱动模块分别与上位机电性连接,所述雷达模块与驱动模块固定连接,所述驱动模块与塔架可移动式连接,所述塔架固定于机场跑道的一侧,塔架的固定位置与机场跑道中线的垂直距离为150-240米,所述雷达模块距离地面的高度和塔架的固定位置与机场跑道中线的垂直距离的比值为tan2.5°-tan3.5°;
所述上位机,用于生成扫描驱动信号,将所述扫描驱动信号发送至驱动模块和雷达模块,以及接收雷达模块发送的检测结果;
所述驱动模块,用于接收扫描驱动信号,根据所述扫描驱动信号带动雷达模块进行旋转,使得雷达模块能够对机场跑道进行扫描;
所述雷达模块,用于接收扫描驱动信号,根据所述扫描驱动信号确定雷达的实时方位角,向机场跑道发送射频信号以及接收经过目标反射后的反射信号,根据所述反射信号和实时方位角判断机场跑道是否有异物生成检测结果,并将所述检测结果发送至上位机。
进一步的,所述雷达模块包括:天线、频综模块、毫米波模块、中频模块和信号处理模块;
所述频综模块,用于生成时钟信号和本振信号;
所述毫米波模块,用于对所述本振信号进行八倍频处理后得到的射频信号输入至天线,以及通过天线接收反射信号并将其变换到零中频IQ信号;
所述中频模块,用于对零中频I路信号和Q路信号进行放大;
所述信号处理模块,用于接收扫描驱动信号,根据所述扫描驱动信号确定雷达的实时方位角,对放大后的零中频I路信号和Q路信号进行采样,并根据采样信号和实时方位角判断机场跑道是否有异物,生成检测结果,并将所述检测结果发送至上位机。
进一步的,所述信号处理模块还用于:当判定机场跑道有异物时,根据采样信号和实时方位角确定异物的位置。
进一步的,所述驱动装置包括:电源模块、控制器、电机、电机驱动模块和传动机构;
所述电源模块,用于给控制器和电机供电;
所述控制器,用于接收扫描驱动信号,根据所述扫描驱动信号并通过电机驱动模块驱动电机转动;
所述传功机构,用于在电机的驱动下带动雷达模块进行旋转,使得雷达模块能够对机场跑道进行扫描。
进一步的,所述驱动装置上设有编码器;
所述编码器,用于检测电机的实时转动角度,并将其发送至雷达模块;
所述雷达模块,还用于接收编码器发送的实时转动角度,并据此确定雷达的实时方位角,根据所述反射信号和确定的实时方位角判断机场跑道是否有异物生成检测结果。
另一方面,本发明还提出一种机场跑道异物检测方法,应用于上述的机场跑道异物检测装置,包括以下步骤:
步骤1、上位机生成扫描驱动信号,将所述扫描驱动信号发送至驱动模块和雷达模块;
步骤2、驱动模块接收扫描驱动信号,根据所述扫描驱动信号带动雷达模块进行旋转,使得雷达模块能够对机场跑道进行扫描;
步骤3、雷达模块接收扫描驱动信号,根据所述扫描驱动信号确定雷达的实时方位角,向机场跑道发送射频信号以及接收经过目标反射后的反射信号,根据所述反射信号和实时方位角判断机场跑道是否有异物生成检测结果,并将所述检测结果发送至上位机。
本发明的有益效果是:本发明所述的机场跑道异物检测装置及方法,通过在机场跑道的一侧并采用塔架的方式固定雷达模块,实现对机场跑道异物的自动检测,提高了异物检测的准确性,并且一个雷达模块检测的跑道长度可达600-900米,无需在同一跑道设置较多的雷达模块,减少了异物检测的成本,提高了机场跑道的安全性。
附图说明
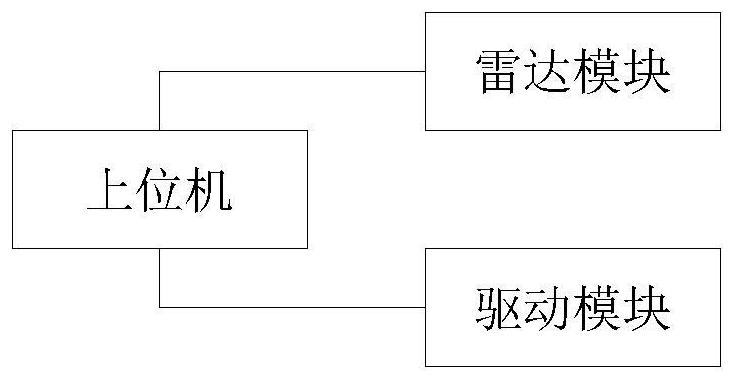
图1为本发明实施例所述的机场跑道异物检测装置的原理示意图;
图2为本发明实施例所述的机场跑道异物检测装置的结构示意图;
图3为本发明实施例所述的机场跑道异物检测方法的流程示意图;
附图标记说明:
D-雷达模块;A-机场跑道;T-塔架;l-机场跑道中线;a-塔架的固定位置与机场跑道中线的垂直距离;b-雷达模块距离地面的高度。
具体实施方式
下面将结合附图对本发明的实施方式进行详细描述。
本发明旨在解决现有的机场跑道异物检测方法存在检测准确度低以及成本较高问题,提出一种机场跑道异物检测装置及方法,其主要的技术方案包括:雷达模块、驱动模块、塔架和上位机,所述雷达模块和驱动模块分别与上位机电性连接,所述雷达模块与驱动模块固定连接,所述驱动模块与塔架可移动式连接,所述塔架固定于机场跑道的一侧,塔架的固定位置与机场跑道中线的垂直距离为150-240米,所述雷达模块距离地面的高度和塔架的固定位置与机场跑道中线的垂直距离的比值为tan2.5°-tan3.5°;所述上位机,用于生成扫描驱动信号,将所述扫描驱动信号发送至驱动模块和雷达模块,以及接收雷达模块发送的检测结果;所述驱动模块,用于接收扫描驱动信号,根据所述扫描驱动信号带动雷达模块进行旋转,使得雷达模块能够对机场跑道进行扫描;所述雷达模块,用于接收扫描驱动信号,根据所述扫描驱动信号确定雷达的实时方位角,向机场跑道发送射频信号以及接收经过目标反射后的反射信号,根据所述反射信号和实时方位角判断机场跑道是否有异物生成检测结果,并将所述检测结果发送至上位机。
在实际使用之前,需要将雷达模块与驱动装置固定后安装在塔架上,塔架垂直固定于距离机场跑道的一侧,其固定位置距离机场跑道中线的垂直距离为150-240米,塔架的高度能够使得雷达模块距离地面的高度和塔架的固定位置与机场跑道中线的垂直距离的比值为tan2.5°-tan3.5°,其中,机场跑道中线为平行于机场跑道,位于机场跑道二分之一宽度处的中线;在实际使用时,驱动模块接收上位机发送扫描驱动信号进而带动雷达模块进行实现雷达的圆周扫描、扇形扫描及驻留功能,雷达模块在扫描过程中,实时判断当前扫描位置是否存在异物,并据此生成检测结果,最后,雷达模块将检测结果发送至上位机,工作人员可以根据上位机中的检测结果判断机场跑道是否存在异物。
实施例
本发明实施例所述的机场跑道异物检测装置,如图1所示,包括:雷达模块、驱动模块、塔架和上位机,所述雷达模块和驱动模块分别与上位机电性连接,所述雷达模块与驱动模块固定连接,所述驱动模块与塔架可移动式连接,所述塔架固定于机场跑道的一侧,塔架的固定位置与机场跑道中线的垂直距离为150-240米,所述雷达模块距离地面的高度和塔架的固定位置与机场跑道中线的垂直距离的比值为tan2.5°-tan3.5°;
所述上位机,用于生成扫描驱动信号,将所述扫描驱动信号发送至驱动模块和雷达模块,以及接收雷达模块发送的检测结果;
所述驱动模块,用于接收扫描驱动信号,根据所述扫描驱动信号带动雷达模块进行旋转,使得雷达模块能够对机场跑道进行扫描;
所述雷达模块,用于接收扫描驱动信号,根据所述扫描驱动信号确定雷达的实时方位角,向机场跑道发送射频信号以及接收经过目标反射后的反射信号,根据所述反射信号和实时方位角判断机场跑道是否有异物生成检测结果,并将所述检测结果发送至上位机。
具体而言,雷达模块可通过法兰与驱动模块进行固定,塔架横梁避开雷达底部的维修通道入口,保证维护人员能正常进入雷达进行维护作业。
可以理解,在实际使用之前,如图2所示,需要将雷达模块D与驱动装置固定后安装在塔架T上,塔架T垂直固定于距离机场跑道A的一侧,其固定位置距离机场跑道中线l的垂直距离a为150-240米,塔架T的高度能够使得雷达模块距离地面的高度b和塔架的固定位置与机场跑道中线l的垂直距离a的比值为tan2.5°-tan3.5°,即b/a=tan2.5°-tan3.5°,其中,机场跑道中线l为平行于机场跑道,位于机场跑道A二分之一宽度处的中线;
本实施例中,所述雷达模块可以包括:天线、频综模块、毫米波模块、中频模块和信号处理模块;
所述频综模块,用于生成时钟信号和本振信号;
所述毫米波模块,用于对所述本振信号进行八倍频处理后得到的射频信号输入至天线,以及通过天线接收反射信号并将其变换到零中频IQ信号;
所述中频模块,用于对零中频I路信号和Q路信号进行放大;
所述信号处理模块,用于接收扫描驱动信号,根据所述扫描驱动信号确定雷达的实时方位角,对放大后的零中频I路信号和Q路信号进行采样,并根据采样信号和实时方位角判断机场跑道是否有异物,生成检测结果,并将所述检测结果发送至上位机。
为了实现雷达的自动扫描,其中,上位机发送的扫描驱动信号可以是预先设置好的,在需要对机场跑道进行异物检测时,工作人员可通过上位机发送扫描驱动信号。
可以理解,雷达模块可通过通信模块与上位机进行连接,在实际使用时,驱动模块接收上位机发送扫描驱动信号进而带动雷达模块进行实现雷达的圆周扫描、扇形扫描及驻留功能,雷达模块在扫描过程中,通过其天线发射射频信号以及接收反射信号,其中的控制模块通过接收的反射信号以及读取的雷达实时方位角判断当前扫描位置是否存在异物,若是,则记录存在异物及其位置,待雷达扫描结束后,生成检测结果,最后,控制模块将检测结果发送至上位机,工作人员可以根据上位机中的检测结果判断机场跑道是否存在异物及异物的位置。
为了对天线进行保护,在天线外部还设有由玻璃纤维制成的天线罩。
本实施例中,所述驱动装置可以包括:电源模块、控制器、电机、电机驱动模块和传动机构;
所述电源模块,用于给控制器和电机供电;
所述控制器,用于接收扫描驱动信号,根据所述扫描驱动信号并通过电机驱动模块驱动电机转动;
所述传功机构,用于在电机的驱动下带动雷达模块进行旋转,使得雷达模块能够对机场跑道进行扫描。
其中,电机驱动模块可采用YASKAWA公司三相AC 200V SGD7S-5R5A型伺服电机驱动器,电机可采用YASKAWA公司SGM7J-08AFC6S型伺服电机。
可以理解,驱动装置中的控制器收到扫描驱动信号后,根据扫描驱动信号控制电机转动,进而通过传动机构带动雷达模块进行旋转,使得雷达模块能够对机场跑道进行圆周扫描、扇形扫描及驻留。
为了提高异物位置确定的准确性,本实施例中,所述驱动装置上设有编码器;
所述编码器,用于检测电机的实时转动角度,并将其发送至雷达模块;
所述雷达模块,还用于接收编码器发送的实时转动角度,并据此确定雷达的实时方位角,根据所述反射信号和确定的实时方位角判断机场跑道是否有异物生成检测结果。
可以理解,编码器设置于电机上,其能够实时获取电机的实时转动角度,并将电机的实时转动角度发送至雷达模块中的控制模块,控制模块据此计算出对应的雷达的方位角,进而根据反射信号和雷达的方位角判断是否有异物以及异物的位置。
基于上述技术方案,本实施例还提出一种机场跑道异物检测方法,如图3所示,应用于上述的机场跑道异物检测装置,包括以下步骤:
步骤S1、上位机生成扫描驱动信号,将所述扫描驱动信号发送至驱动模块和雷达模块;
步骤S2、驱动模块接收扫描驱动信号,根据所述扫描驱动信号带动雷达模块进行旋转,使得雷达模块能够对机场跑道进行扫描;
步骤S3、雷达模块接收扫描驱动信号,根据所述扫描驱动信号确定雷达的实时方位角,向机场跑道发送射频信号以及接收经过目标反射后的反射信号,根据所述反射信号和实时方位角判断机场跑道是否有异物生成检测结果,并将所述检测结果发送至上位机。
可以理解,由于本发明实施例所述的机场跑道异物检测方法是基于实施例所述机场跑道异物检测装置实现的方法,对于实施例公开的方法而言,由于其与实施例公开的装置相对应,所以描述的较为简单,相关之处参见装置的部分说明即可。
- 机场跑道异物检测装置及方法
- 一种机场跑道异物检测装置