一种新型细长型柔性扑翼
文献发布时间:2023-06-19 11:03:41
技术领域
本发明主要涉及扑翼飞行器领域,尤其涉及一种新型细长型柔性扑翼。
背景技术
扑翼飞行器的气动效率高,机动性能好,通过扑翼运动能够同时提供升力和推力。传统扑翼飞行器多采用刚性机翼,由于柔性不足、形状不变,功能比较局限;正在发展的智能主动控制的变形扑翼,涉及智能材料及控制等复杂技术,实现难度较高。
发明内容
一种新型细长型柔性扑翼,所述柔性扑翼的一端为固定端,另一端为自由端,所述固定端与飞行器连接,连接处位于扑翼前缘与扑翼弦向中点之间的任意位置,扑翼包括展向梁、弦向梁、蒙皮,展向梁与弦向梁通过刚性关节和/或柔性关节连接,形成骨架,蒙皮包围在骨架外且用粘接剂或铆钉固定于骨架上,柔性关节为铰链连接,所述柔性关节还包括四连杆机构和限制杆件,四连杆机构位于弦向梁上,限制杆件位于展向梁上。
驱动信号可以从飞行器通过连接处传递到扑翼,控制扑翼的扑动。
在一些优选的实施方式中,所述细长型翼型的展弦比大于等于3。
在一些优选的实施方式中,所述展向梁的数量为奇数且大于等于3,优选为5。
展向梁作为主要的支撑结构,所述展向梁的数量具体可以列举出例如:3、5、7、9、11、13、15、17、19、21、23、25、27、29、31、33、35、37、39、41、43、45、47、49、51、53、55、57、59、61、63、65、67、69、71、73、75、77、79、81、83、85、87、89、91、93、95、97、99。
在一些优选的实施方式中,展向梁之间相互平行,弦向梁之间相互平行。
在一些优选的实施方式中,位于前缘的展向梁与弦向梁通过刚性关节连接,位于后缘的展向梁与弦向梁通过刚性关节连接。
柔性关节能够使弦向梁和展向梁之间产生相对转动,转动幅度受到限制杆件的限制。
在一些优选的实施方式中,所述刚性关节的连接方式为螺栓螺母连接、焊接、铆钉连接、插口连接、卡扣连接、法兰连接、螺纹连接中的一种。
所述刚性关节的连接方式也不局限于以上连接形式。
在一些优选的实施方式中,所述四连杆机构包括连杆一、连杆二、连杆三、连杆四、铰链一、铰链二、铰链三、铰链四,连杆一和连杆二通过铰链一连接,连杆二和连杆三通过铰链二连接,连杆三和连杆四通过铰链三连接,连杆四和连杆一通过铰链四连接。
在一些优选的实施方式中,所述四连杆机构通过铰链一和铰链四固定在弦向梁上,连杆一通过铰链一和铰链四连接于弦向梁上。
本发明的第二方面提供一种用于上述的新型细长型柔性扑翼的四连杆机构,所述四连杆机构包括连杆一、连杆二、连杆三、连杆四、铰链一、铰链二、铰链三、铰链四,连杆一和连杆二通过铰链一连接,连杆二和连杆三通过铰链二连接,连杆三和连杆四通过铰链三连接,连杆四和连杆一通过铰链四连接。
工作原理及有益效果:柔性关节包括四连杆机构和限制杆件,通过对四连杆机构进行调整,来调整展向梁和弦向梁之间相对转动的幅值,从而实现不同“柔度”的调节。通过设置柔性关节的分布并调整其“柔度”,使柔性扑翼在面对不同工况载荷下能够灵活地调整为最优的结构,以满足气动和结构性能的双重需求。
如图4,所述四连杆机构包括连杆一、连杆二、连杆三、连杆四、铰链一、铰链二、铰链三、铰链四,连杆一和连杆二通过铰链一连接,连杆二和连杆三通过铰链二连接,连杆三和连杆四通过铰链三连接,连杆四和连杆一通过铰链四连接。铰链一和铰链四的位置固定在弦向梁上,铰链二和铰链三的位置根据需要进行调整。
通过调整铰链二和铰链三的位置,可实现弦向梁向展向梁两侧的转动受到不同幅度的限制。
图4为四连杆机构的一般情况之一,当弦向梁向纵向梁的上侧转动时,连杆二接触限制杆件时即停止;当弦向梁向纵向梁的下侧转动时,连杆三接触限制杆件时即停止。
图5和图6显示两种特殊情况。
如图5所示,当连杆二平行于限制杆件且位于连杆一上侧,则完全限制弦向梁向展向梁上侧的转动。
如图6所示,当连杆二平行于限制杆件且位于连杆一下侧,则完全限制弦向梁向展向梁下侧的转动。
如此,通过更换不同长度的连杆及调整铰链的位置可实现对于弦向梁向展向梁单侧转动幅度的限制。通过更换不同长度的连杆及调整铰链的位置可实现对于弦向梁向展向梁双侧转动幅度的限制,达到两侧具有相同或不同转动幅度的效果。
本发明提供的新型细长型柔性扑翼,是一种可被动变形的机翼结构。不仅解决了现有扑翼承载能力和变形之间的矛盾问题,而且结构简洁,容易操纵。发明人在完成本发明的过程中发现,本发明提供的柔性扑翼整体结构上有展向梁作为主要的支撑结构,具有足够的承载能力和抗弯刚度;由于柔性关节和刚性关节的存在,实现结构的刚柔相济,又能够提供必要而不过度的被动变形以满足气动性能。
此外,发明人预料不到的发现,通过设置柔性关节处的四连杆机构和限制杆件,能够使柔性扑翼的弦向梁和展向梁在连接处具有在一定范围内可转动的效果,方便根据不同条件调整不同位置的柔性关节的灵活程度。这样通过“大转动小变形”实现扑翼的变形,提高气动和结构效率。
附图说明
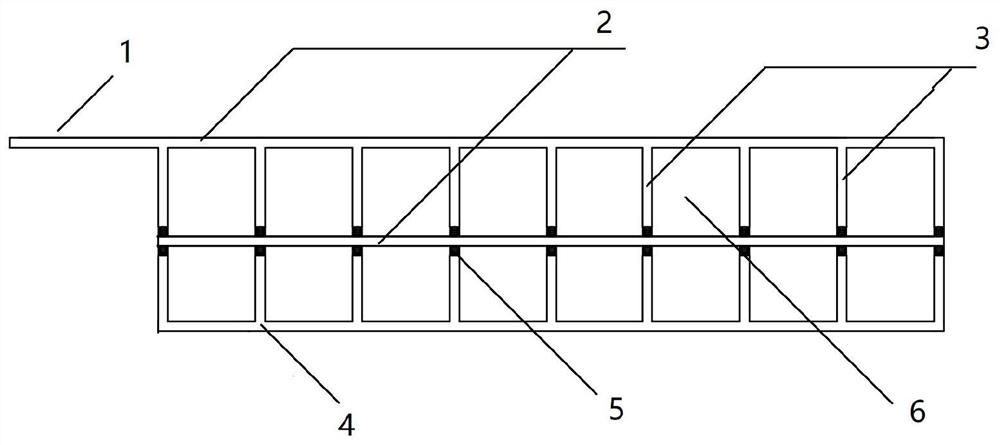
图1为本发明的一些实施方式中提供的新型细长型柔性扑翼示意图;
图2为本发明的一些实施方式中提供的新型细长型柔性扑翼示意图;
图3为本发明的一些实施方式中提供的柔性关节示意图;
图4为本发明的一些实施方式中提供的四连杆机构示意图;
图5为本发明的一些实施方式中提供的四连杆机构示意图;
图6为本发明的一些实施方式中提供的四连杆机构示意图;
图中各标记如下,1为固定端,2为展向梁,3为弦向梁,4为蒙皮,5为柔性关节,6为刚性关节,7为四连杆机构,8为铰链,9为限制杆件,10为连杆一、11为连杆二、12为连杆三、13为连杆四、14为铰链一、15为铰链二、16为铰链三、17为铰链四。
具体实施方式
本发明中,细长型翼型是指展弦比大于等于3的翼型。
实施例1
如图1,一种新型细长型柔性扑翼,所述柔性扑翼的一端为固定端1,另一端为自由端,所述固定端与飞行器连接,连接处位于扑翼前缘与扑翼弦向中点之间的任意位置,扑翼包括展向梁2、弦向梁3、蒙皮4,展向梁与弦向梁通过刚性关节6和柔性关节5连接,形成骨架,蒙皮包围在骨架外且用粘接剂固定于骨架上,柔性关节为铰链8连接,所述柔性关节还包括四连杆机构7和限制杆件9,四连杆机构位于弦向梁上,限制杆件位于展向梁上。
所述展向梁的数量为3。第一根展向梁为扑翼前缘,第三根展向梁为扑翼后缘。
展向梁之间相互平行,弦向梁之间相互平行。
位于前缘的展向梁与弦向梁通过刚性关节连接,位于后缘的展向梁与弦向梁通过刚性关节连接。第二根展向梁与弦向梁通过柔性关节连接。
所述刚性关节的连接方式为螺栓螺母连接。
如图4,所述四连杆机构包括连杆一10、连杆二11、连杆三12、连杆四13、铰链一14、铰链二15、铰链三16、铰链四17,连杆一和连杆二通过铰链一连接,连杆二和连杆三通过铰链二连接,连杆三和连杆四通过铰链三连接,连杆四和连杆一通过铰链四连接。
所述四连杆机构通过铰链一和铰链四固定在弦向梁上,连杆一通过铰链一和铰链四转动连接于弦向梁上。
所述柔性关节处四连杆机构的位置如图4,连杆二和连杆四分别位于连杆一的两侧,限制弦向梁向展向梁两侧的转动幅度,使柔性扑翼的弦向梁和展向梁在连接处具有双向可转动效果,且转动幅度可调节。
实施例2
如图1,一种新型细长型柔性扑翼,所述柔性扑翼的一端为固定端1,另一端为自由端,所述固定端与飞行器连接,连接处位于扑翼前缘与扑翼弦向中点之间的任意位置,扑翼包括展向梁2、弦向梁3、蒙皮4,展向梁与弦向梁通过刚性关节6和柔性关节5连接,形成骨架,蒙皮包围在骨架外且用铆钉固定于骨架上,柔性关节为铰链8连接,所述柔性关节还包括四连杆机构7和限制杆件9,四连杆机构位于弦向梁上,限制杆件位于展向梁上。
所述展向梁的数量为3。第一根展向梁为扑翼前缘,第三根展向梁为扑翼后缘。
展向梁之间相互平行,弦向梁之间相互平行。
位于前缘的展向梁与弦向梁通过刚性关节连接,位于后缘的展向梁与弦向梁通过刚性关节连接。第二根展向梁与弦向梁通过柔性关节连接。
所述刚性关节的连接方式为螺栓螺母连接。
如图4,所述四连杆机构包括连杆一10、连杆二11、连杆三12、连杆四13、铰链一14、铰链二15、铰链三16、铰链四17,连杆一和连杆二通过铰链一连接,连杆二和连杆三通过铰链二连接,连杆三和连杆四通过铰链三连接,连杆四和连杆一通过铰链四连接。
所述四连杆机构通过铰链一和铰链四固定在弦向梁上,连杆一通过铰链一和铰链四转动连接于弦向梁上。
所述柔性关节处四连杆机构的位置如图5,连杆二平行于限制杆件且位于连杆一上侧,完全限制弦向梁向展向梁上侧的转动,使柔性扑翼的弦向梁和展向梁在连接处具有单向可转动效果,且转动幅度可调节
实施例3
如图2,一种新型细长型柔性扑翼,所述柔性扑翼的一端为固定端1,另一端为自由端,所述固定端与飞行器连接,连接处位于扑翼前缘与扑翼弦向中点之间的任意位置,扑翼包括展向梁2、弦向梁3、蒙皮4,展向梁与弦向梁通过刚性关节6和柔性关节5连接,形成骨架,蒙皮包围在骨架外且用粘接剂固定于骨架上,柔性关节为铰链8连接,所述柔性关节还包括四连杆机构7和限制杆件9,四连杆机构位于弦向梁上,限制杆件位于展向梁上。
所述展向梁的数量为5。第一根展向梁为扑翼前缘,第五根展向梁为扑翼后缘。
展向梁之间相互平行,弦向梁之间相互平行。
位于前缘的展向梁与弦向梁通过刚性关节连接,位于后缘的展向梁与弦向梁通过刚性关节连接。第二根展向梁与弦向梁通过柔性关节连接。
所述刚性关节的连接方式为铆钉连接。
如图4,所述四连杆机构包括连杆一10、连杆二11、连杆三12、连杆四13、铰链一14、铰链二15、铰链三16、铰链四17,连杆一和连杆二通过铰链一连接,连杆二和连杆三通过铰链二连接,连杆三和连杆四通过铰链三连接,连杆四和连杆一通过铰链四连接。
所述四连杆机构通过铰链一和铰链四固定在弦向梁上,连杆一通过铰链一和铰链四转动连接于弦向梁上。
所述柔性关节处四连杆机构的位置如图5,连杆二平行于限制杆件且位于连杆一上侧,完全限制弦向梁向展向梁上侧的转动,使柔性扑翼的弦向梁和展向梁在连接处具有单向可转动效果,且转动幅度可调节。
实施例4
如图2,一种新型细长型柔性扑翼,所述柔性扑翼的一端为固定端1,另一端为自由端,所述固定端与飞行器连接,连接处位于扑翼前缘与扑翼弦向中点之间的任意位置,扑翼包括展向梁2、弦向梁3、蒙皮4,展向梁与弦向梁通过刚性关节6和柔性关节5连接,形成骨架,蒙皮包围在骨架外且用铆钉固定于骨架上,柔性关节为铰链8连接,所述柔性关节还包括四连杆机构7和限制杆件9,四连杆机构位于弦向梁上,限制杆件位于展向梁上。
所述展向梁的数量为5。第一根展向梁为扑翼前缘,第五根展向梁为扑翼后缘。
展向梁之间相互平行,弦向梁之间相互平行。
位于前缘的展向梁与弦向梁通过刚性关节连接,位于后缘的展向梁与弦向梁通过刚性关节连接。第二根展向梁与弦向梁通过柔性关节连接。
所述刚性关节的连接方式为铆钉连接。
如图4,所述四连杆机构包括连杆一10、连杆二11、连杆三12、连杆四13、铰链一14、铰链二15、铰链三16、铰链四17,连杆一和连杆二通过铰链一连接,连杆二和连杆三通过铰链二连接,连杆三和连杆四通过铰链三连接,连杆四和连杆一通过铰链四连接。
所述四连杆机构通过铰链一和铰链四固定在弦向梁上,连杆一通过铰链一和铰链四转动连接于弦向梁上。
所述柔性关节处四连杆机构的位置如图6,连杆二平行于限制杆件且位于连杆一侧,完全限制弦向梁向展向梁上侧的转动,使柔性扑翼的弦向梁和展向梁在连接处具有单向可转动效果,且转动幅度可调节。
- 一种新型细长型柔性扑翼
- 一种新型含可修复关节的仿生柔性扑翼、飞行器