一种基于同期卫星影像的多架次无人机影像相对辐射校正方法
文献发布时间:2023-06-19 11:11:32
技术领域
本发明属于遥感影像相对辐射校正领域,特别涉及一种跨传感器的多架次无人机影像相对辐射校正方法。
背景技术
无人机凭借低成本、实时、高效的优势,广泛应用于作物干旱胁迫、杂草检测、营养状况、长势监测和产量预测等方面。但是,在进行大范围作物监测中,无人机因续航能力不强,往往需要获取多架次无人机影像才能完成任务。在多架次无人机影像获取中,由于太阳辐照度、大气状态以及地形等因素的影响,导致相同地物在不同影像中存在辐射差异,不利于进一步的定量化研究。辐射校正的目的就是保留地表物体真实的变化信息,去除上述因素造成的辐射差异。因此,在利用多架次无人机遥感影像生成无缝合成地图(通过拼接)或反演生化参数之前,需要对各架次无人机影像进行辐射校正处理。
目前,常用的辐射校正方法主要有两大类:绝对辐射校正(Absolute radiometriccorrection)和相对辐射校正(Relative radiometric correction)。绝对辐射校正是将每幅影像的灰度值转化为地表反射率,以及遥感预处理中大气校正的过程。要执行这一过程,就必须清晰定义成像瞬间实时大气状态参数(如水汽、气溶胶特征)以及恰当的辐射传输方程从而模拟大气与电磁辐射的交互作用,这些数据不是很容易能够获取,特别是针对很多历史遥感图像,无法得到有效执行。而对于无人机影像来说,由于飞行高度和飞行区域的限制,更加无法获得绝对辐射校正所需的参数。而相对辐射校正则避免了这样的问题,它是以一幅影像作为参考,并调整目标影像的辐射特性以匹配参考影像。该方法的基本原理是首先选定一幅参考影像,调整另一影像的辐射特性,使之与参考影像一致,从而使得两幅影像在相同地物上具有相似灰度值。这种操作不仅简单高效,而且低成本地实现跨传感器、多时相遥感影像间的辐射校正。因此,相比绝对辐射校正,相对辐射校正更加受到研究人员的青睐,此前也有许多关于不同相对辐射校正方法的研究。
针对多架次无人机影像的相对辐射校正,研究人员通常在两幅影像的重叠区域提取伪不变特征点,并建立线性回归来消除无人机影像之间的辐射差异。例如,为了以高空间分辨率(即亚米)绘制大城市区域的地图,需要在许多飞行路线上获取机载热红外影像并将其拼接在一起,当前研究一般采用重叠区域提取伪不变特征点建立线性回归的方法来消除辐射差异。但是这种方法受到重叠区域的影响,无法获得相对精确的辐射校正结果。应用粗分辨率影像对高分辨率影像进行相对辐射校正是当前研究的热点。因此可以将无人机影像升尺度到卫星影像的空间分辨率,然后建立各波段与卫星影像的模型,并依据该模型进行辐射校正。但是由于无人机影像升尺度到卫星影像过程中产生的尺度效应,导致人为寻找均质像元的不确定性增大。虽然卫星影像可以为多架次无人机影像的辐射不一致研究提供数据基础,但是以卫星影像辅助无人机影像进行相对辐射校正的研究鲜有报道。因此,明确卫星影像如何辅助无人机影像进行相对辐射校正尤为重要。
发明内容
本发明所解决的问题在于提供一种基于同期卫星影像的多架次无人机影像相对辐射校正方法,并解决构建过程中存在的技术问题,减小同时期的多架次无人机影像因为外界环境引起的辐射差异,便于生成无缝合成地图(通过拼接)或反演生化参数。
实现本发明目的的技术解决方案为:
一种基于同期卫星影像的多架次无人机影像相对辐射校正方法,包括以下步骤:
步骤1:根据多架次有辐射差异无人机影像的成像时间,获取同时期的中高空间分辨率卫星影像并进行预处理,得到相同区域的无人机影像和卫星影像;
步骤2:将重采样无人机影像和卫星影像的光谱反射率作为训练数据集,以回归树的方式将训练数据集分割为多个子集并建立多元线性回归模型;
步骤3:将多子集多元线性回归模型应用到无人机影像,生成具有卫星辐射特征的参考影像;
步骤4:基于无人机影像和具有卫星辐射特征的参考影像,以像元为处理单元,应用最小二乘回归方法获得各波段的相对辐射校正模型;
步骤5:将无人机影像逐像元乘以对应波段的相对辐射校正模型,从而获得相对辐射校正后的无人机影像。
进一步的,本发明提出的基于同期卫星影像的多架次无人机影像相对辐射校正方法,步骤1中数据预处理的具体步骤包括:
步骤1-1:对多架次无人机影像分别进行地理配准和辐射定标,对卫星影像进行辐射定标、大气校正、几何校正,获得无人机和卫星光谱反射率数据;
步骤1-2:将多架次无人机和卫星影像重投影到相同坐标系;
步骤1-3:利用最近邻插值法将步骤1-2中的无人机影像数据重采样至卫星影像的空间分辨率,得到与卫星影像一致的空间分辨率无人机影像数据。
进一步的,本发明提出的基于同期卫星影像的多架次无人机影像相对辐射校正方法,步骤2中生成多子集多元回归模型的具体步骤包括:
步骤2-1:将重采样无人机影像和卫星影像各个波段的光谱反射率数据作为训练数据集;
步骤2-2:应用Cubist回归树模型,将训练数据集分割为多个子集,从无人机重采样影像的所有像素中提取输入数据,Cubist模型的规则数设置为1-20,步长为1,结合基于均方根误差(Root Mean Square Error,RMSE)和拟合度(R-squared,R
步骤2-3:保存训练数据集获得的多子集多元线性回归模型。
进一步的,本发明提出的基于同期卫星影像的多架次无人机影像相对辐射校正方法,步骤3中生成参考影像的具体步骤包括:
步骤3-1:将无人机影像作为输入数据;
步骤3-2:应用步骤2获得的多子集多元线性回归模型,逐像元地生成具有卫星辐射特征的参考影像。
进一步的,本发明提出的基于同期卫星影像的多架次无人机影像相对辐射校正方法,步骤4中生成相对辐射校正模型的具体步骤包括:
步骤4-1:将无人机影像作为输入数据,将参考影像作为目标数据;
步骤4-2:应用最小二乘回归方法建立各波段的相对辐射校正模型;
步骤4-3:保存各波段的相对辐射校正模型。
进一步的,本发明提出的基于同期卫星影像的多架次无人机影像相对辐射校正方法,步骤4-2中最小二乘回归方法的公式为:
其中,x
进一步的,本发明提出的基于同期卫星影像的多架次无人机影像相对辐射校正方法,步骤5中生成相对辐射校正影像的公式为:
F(m
其中,F(m
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
1、本发明的基于同期卫星影像的多架次无人机影像相对辐射校正方法既减小了多架次无人机影像之间的辐射差异,也保证了无人机影像的空间信息完整性;
2、本发明的基于同期卫星影像的多架次无人机影像相对辐射校正方法是一种跨传感器的相对辐射校正方法,不受多架次无人机影像间重叠区域大小的限制,具有很好的适用性;
3、本发明的基于同期卫星影像的多架次无人机影像相对辐射校正方法操作步骤简单、高效,并且可实现自动化,易于推广。
附图说明
图1是本发明的基于同期卫星影像的多架次无人机影像的示例影像图。
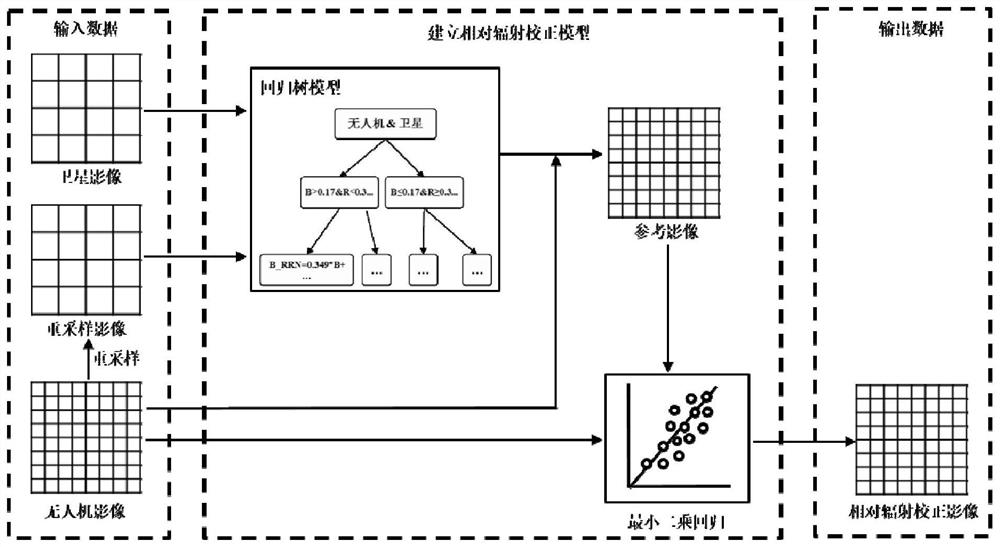
图2是本发明的基于同期卫星影像的多架次无人机影像相对辐射校正方法的示意图。
图3是其他方法与本发明方法所生成的相对辐射校正影像与原始影像镶嵌对比图。
图4是其他方法与本发明方法所生成的高分辨率影像植被指数与原始影像植被指数重叠区域的密度散点对比图。
具体实施方式
下面详细描述本发明的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
本发明实施例以水稻种植区为例,研究区如图1所示,所采用的无人机数据为六旋翼无人机(DJI M600 Pro,深圳,中国)搭载的多光谱相机(Airphen,Hiphen,France)获取研究区的无人机影像,卫星影像是Sentinel-2卫星获得的同时期多光谱影像数据,其中:(a)、(b)是两幅无人机影像,而且这两幅无人机影像具有重叠区域,获取自2019年7月21日;(c)、(d)是同日拍摄的Sentinel-2卫星影像。考虑到Sentinel-2与无人机影像的建模要求,选取与无人机影像一致的五个波段,具体波段信息如表1所示。
表1无人机波段和相应的卫星波段信息
如图2所示,基于同期卫星影像的多架次无人机影像相对辐射校正方法具体包括以下步骤:
步骤1:获取相同区域的无人机影像和卫星影像,具体步骤包括:
步骤1-1:对多架次无人机影像分别进行地理配准和辐射定标,对卫星影像进行辐射定标、大气校正、几何校正,获得无人机和卫星的光谱反射率数据;
无人机系统于10:00~14:00(北京时间)时间范围内获取了核心测试区域的多架次无人机影像。飞行高度为200m,飞行速度为10m/s,相机设置为自动拍摄照片模式,拍摄时间间隔设置为1s,所有飞行设置旨在确保85%的重叠度与0.1m的空间分辨率。应用PhotoScan软件对无人机影像进行影像拼接和辐射定标等,将无人机影像灰度值转换为反射率。根据无人机影像的采集日期和地理位置,下载了对应的Sentinel-2多光谱影像。利用ESA提供的SNAP软件的Sentinel-2Super Resolution功能,将卫星影像所有波段重采样到10m并在ENVI 5.3软件和ARCGIS 10.2中进行影像裁剪等处理。考虑到Sentinel-2与无人机影像的建模要求,选取与无人机影像一致的五个波段。
步骤1-2:将多架次无人机和卫星影像分别重新投影到相同的坐标系UTM WGS-84;
步骤1-3:利用最近邻插值法将步骤1-2中的无人机影像数据重采样至卫星影像的空间分辨率,得到与卫星影像一致的空间分辨率无人机影像数据。
步骤2:构建多子集多元线性回归模型,具体步骤包括:
步骤2-1:将重采样无人机影像和卫星影像各个波段的光谱反射率数据作为训练数据集;
步骤2-2:应用Cubist回归树模型,将训练数据集分割为多个子集,从无人机重采样影像的所有像素中提取输入数据,Cubist模型的规则数设置为1-20,步长为1,结合基于均方根误差(Root Mean Square Error,RMSE)和拟合度(R-squared,R
步骤2-3:保存训练数据集获得的多子集多元线性回归模型。
步骤3:生成具有卫星辐射特征的参考影像,具体步骤包括:
步骤3-1:将无人机影像作为输入数据;
步骤3-2:应用步骤2获得的多子集多元线性回归模型,逐像元地生成具有卫星辐射特征的参考影像。
步骤4:获取相对辐射校正模型,具体步骤包括:
步骤4-1:将无人机影像作为输入数据,将参考影像作为目标数据;
步骤4-2:应用最小二乘回归方法建立各波段的相对辐射校正模型。其中,最小二乘回归方法的公式为:
其中,x
步骤4-3:保存各波段的相对辐射校正模型。
步骤5:将无人机影像逐像元乘以对应波段的相对辐射校正模型,从而获得相对辐射校正后的无人机影像,其公式为:
F(m
其中,F(m
下面比较本发明提出的方法与MOR法、PIF法、CB法在研究区内对多架次含重叠区域无人机影像相对辐射校正的表现。
现有技术和本发明方法所生成的相对辐射校正影像与原始影像对比图如图3所示,其中:(a)为具有辐射一致性的卫星影像,(b)为辐射不一致的无人机影像,(c)为平均比率法(Mean of Ratio,简称MOR法)的相对辐射校正结果,(d)为伪不变特征法(Pseudo-invariant Features,简称PIF法)的相对辐射校正结果,(e)为基于规则和实例的回归模型(Cubist,简称CB法)的相对辐射校正结果,(f)为本发明方法的相对辐射校正结果,第二行(g)-(l)和第三行(m)-(r)分别表示在(a)-(f)中子区域(矩形框)的放大图。各方法得到的植被指数与原始影像植被指数的散点图如图4所示,其中:(a)-(e)表示各方法获得的植被指数CIre的密度散点图,(f)-(j)表示各方法获得的植被指数NDVI的密度散点图,从左到右的五列分别对应原始无人机影像、MOR、PIF、CB、本发明方法。表2汇总了其他方法与本发明方法对研究区内的植被指数相对辐射校正的统计评估情况,其中:CC是相关系数,RMSE是均方根误差,粗体值分别表示对应方法的最高的CC值和最低的RMSE值。
表2.本研究评估的四种相对辐射校正方法重叠区域的统计评估
从图3、图4和表2可以看出,本发明方法所生成的相对辐射结果从目视角度和统计角度来看,本发明的方法可以消除多架次无人机影像之间的辐射差异,从而生成无缝拼接地图,用于绘制高分辨率大区域的研究区和进行生化参数反演研究等。
以上所述仅是本发明的部分实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进,这些改进应视为本发明的保护范围。
- 一种基于同期卫星影像的多架次无人机影像相对辐射校正方法
- 一种基于同期卫星影像的多架次无人机影像相对辐射校正方法