一种高速卧式三轴快速对位旋转焊接装置及其应用
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及特种塑料焊接技术领域,具体为一种高速卧式三轴快速对位旋转焊接装置及其应用。
背景技术
目前塑料行业内接头连接的传统方法包括机械装配(螺装、铆装、卡压、橡胶圈等)、胶粘、或其他先进连接方式等,其中机械装配、胶粘的接头强度无法满足设计所需的接头强度,经过验证,相关设备及装置也无法满足设计需求。
塑料焊接方法包括热熔焊、激光焊、红外焊接、超声波焊接、感应焊接、振动摩擦焊等,经过系列验证,均不满足上述严苛工况的材料熔点高、不透明、局部熔化等要求。另塑料焊接方法中的旋转摩擦焊接有望实现侧面、大面积连续缝隙的熔化连接,但目前无相关成熟应用的技术方法或者可供选型的设备。
专利CN111550633A公开了一种聚醚醚酮管接头及焊接方法,专利CN109320906A公开了一种航空液冷系统用聚醚醚酮改性管材,技术上需要实现该接头与圆管在侧面环状高深度连接接触处的高粘合力的密封焊接。在引用专利CN111550633A中,该装备连接接触处的特点是:1)需要接触处承受至少60公斤(6MPa)的压强压力,这样需要特种塑料接头和圆管的接触面积大;2)接头和圆管的壁厚非常薄,装配或焊接过程易变形、破损;3)设计的特种塑料的接头熔点比普通塑料熔点高近一倍;4)圆管可长到3-5米,只能将圆管和接头采用卧式焊接;5)该材料本身不透明,无法透光。
发明内容
基于上述缺陷,本发明的目的在于提供一种可实现高熔点特种塑料、局部、侧面大接触面、连接处高强度、卧式焊接连接的高速卧式三轴快速对位旋转焊接装置。
本发明通过以下技术手段实现解决上述技术问题的:
一种高速卧式三轴快速对位旋转焊接装置,包括防护外壳,还包括设置在所述防护外壳内部的摩擦焊机机架、快速夹头机构、X轴直线运动机构、Y轴直线运动机构、转动机构、气缸顶出机构和零件夹头付;所述快速夹头机构设置在所述摩擦焊机机架一侧;所述X轴直线运动机构设置在所述摩擦焊机机架另一侧;所述Y轴直线运动机构设置在所述X轴直线运动机构上;所述转动机构包括旋转主轴,所述旋转主轴设置在所述Y轴直线运动机构上;所述气缸顶出机构设置在所述Y轴直线运动机构一侧,且所述气缸顶出机构位于所述旋转主轴一端并与所述旋转主轴活动连接;所述零件夹头付设置在所述旋转主轴另一端,且所述零件夹头付与所述气缸顶出机构的输出端活动连接。
本发明通过微小量调节Y轴直线运动机构,直到旋转主轴与X轴直线运动机构在x轴方向同轴度优于2丝以上;然后通过微调快速夹头机构,使得快速夹头机构、旋转主轴、X轴直线运动机构在x轴方向同轴度优于2丝以上,进而可以实现高熔点的特种塑料熔化焊接;可以实现特种塑料的局部焊接而不需要整体零部件加热;可以实现设计接头的圆柱侧面焊接,焊接接触面积较传统焊接方法面积最大,有效保障焊后零部件连接处的强度;可以实现零部件大长度焊接,根据装置所处环境,零部件的圆管部分可以实现3-5米长度焊接;可以实现不同外径、外形设计的接头和圆管焊接,通过设计可更换快速装配夹头系统。
优选地,所述快速夹头机构包括安装座、转动电机、丝杆组件、管夹头和零件夹头;所述安装座固定在所述摩擦焊机机架一侧,所述安装座为U型框架结构;所述转动电机固定在所述安装座底部;所述丝杆组件包括配套的丝杆和丝母,所述丝杆组件的丝杆下端与所述转动电机的输出轴端部固定连接,所述丝杆组件的丝母套设在所述安装座内部并与所述安装座内壁滑动配合;所述管夹头与所述丝母固定连接;所述零件夹头固定在所述零件夹头上。
优选地,所述X轴直线运动机构包括直线导轨付、伺服电机、滚珠丝杆、滑动板和滑块;所述直线导轨付固定在所述摩擦焊机机架顶部另一侧,所述伺服电机固定在所述摩擦焊机机架一侧;所述滚珠丝杆一端与所述伺服电机的输出轴端部固定连接,所述滚珠丝杆的滚珠与所述滑动板底部固定连接;所述滑块固定在所述滑动板底部,且所述滑块套设在直线导轨付上并与所述直线导轨付在其长度方向上滑动配合。
优选地,所述滑动板顶部设置有导向槽。
优选地,所述Y轴直线运动机构包括支撑座和螺杆;所述支撑座设置在导向槽内并与所述导向槽在其长度方向上滑动配合;所述螺杆套设在支撑座内部并与所述支撑座内部螺纹配合,所述螺杆两端通过轴承座与所述滑动板两端转动连接。
优选地,所述转动机构还包括轴套座、皮带轮罩壳、电机安装座和主轴电机;所述轴套座固定在所述支撑座顶部;所述皮带轮罩壳设置在所述轴套座一侧,所述电机安装座设置在所述轴套座另一侧,所述主轴电机固定在所述电机安装座上,且所述主轴电机的输出轴通过所述皮带轮罩壳的皮带带轮与所述旋转主轴转动连接。
优选地,所述旋转主轴内部中空,且所述旋转主轴的内孔壁上设置有沿其长度方向上分布的滑条。
优选地,所述气缸顶出机构包括气缸安装座、气缸和滑动杆;所述气缸安装座固定在所述轴套座一侧;所述气缸固定在所述气缸安装座上;所述滑动杆一端与所述气缸的活塞杆端部固定连接,所述滑动杆伸入所述旋转主轴的内孔中并与所述零件夹头付一侧活动连接。
优选地,所述滑动杆两侧开设有滑槽,且所述滑槽与所述旋转主轴内孔壁上的滑条滑动配合。
本发明还公开一种高速卧式三轴快速对位旋转焊接装置用于高熔点特种塑料、空间排布的圆形管路、圆柱侧面大面积焊缝的快速焊接;
所述高熔点特种塑料包括聚醚醚酮及其改性料,所述空间排布的圆形管路包括10-45mm外径、1-3mm壁厚的圆形管及其接头,所述圆柱侧面大面积焊缝包括空间排布的圆形管路的圆形管及其接头结合处的8-25cm深度环形焊缝焊接。
本发明的优点在于:
1、本发明通过微小量调节Y轴直线运动机构,直到旋转主轴与X轴直线运动机构在x轴方向同轴度优于2丝以上;然后通过微调快速夹头机构,使得快速夹头机构、旋转主轴、X轴直线运动机构在x轴方向同轴度优于2丝以上,进而可以实现高熔点的特种塑料熔化焊接;可以实现特种塑料的局部焊接而不需要整体零部件加热;可以实现设计接头的圆柱侧面焊接,焊接接触面积较传统焊接方法面积最大,有效保障焊后零部件连接处的强度;可以实现零部件大长度焊接,根据装置所处环境,零部件的圆管部分可以实现3-5米长度焊接;可以实现不同外径、外形设计的接头和圆管焊接,通过设计可更换快速装配夹头系统。
2、本发明通过快速夹头机构、X轴直线运动机构、Y轴直线运动机构的设置,可实现三轴快速调整对位。
3、本发明的主轴电机、旋转主轴和气缸顶出机构共同实现进给精度±0.01mm,进给速度可在0-0.20m/s范围内精准设计调节。
附图说明
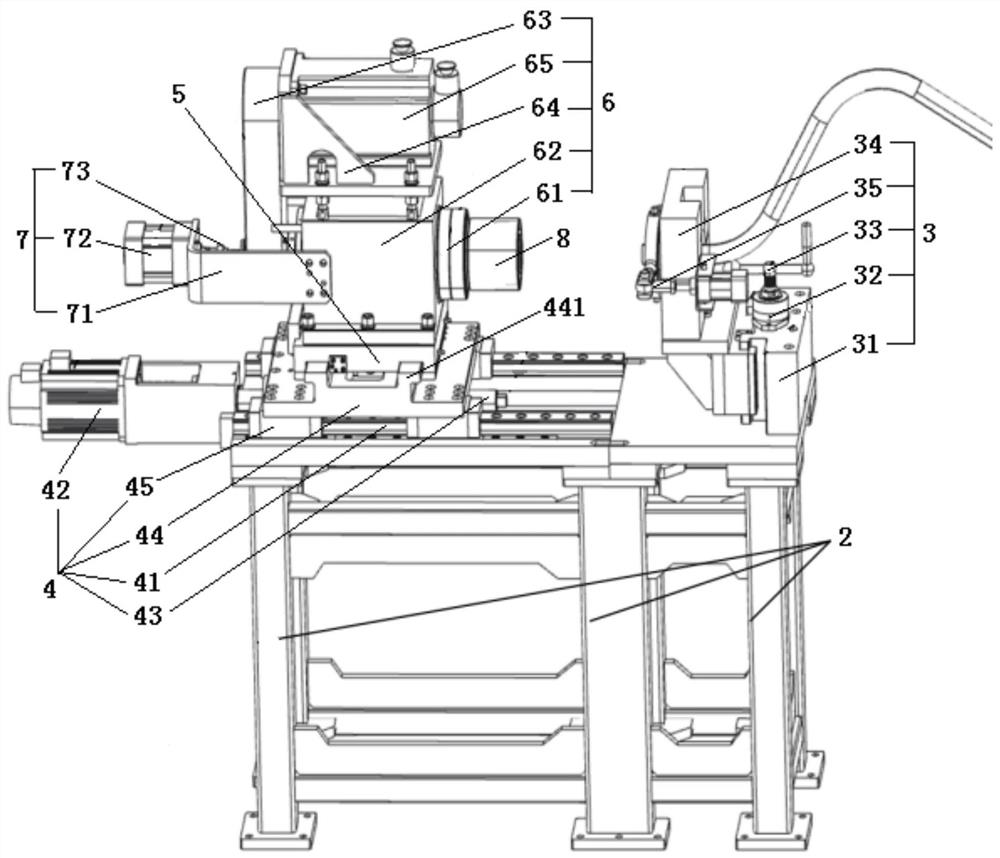
图1为本发明一种高速卧式三轴快速对位旋转焊接装置的结构示意图;
图2为本发明实施例的Y轴直线运动机构的结构示意图;
图3为本发明实施例的旋转主轴和的零件夹头付的连接结构示意图;
图4为本发明实施例的旋转主轴和滑动杆的连接结构示意图。
附图标号说明:
1、防护外壳;2、摩擦焊机机架;3、快速夹头机构;31、安装座;32、转动电机;33、丝杆组件;34、管夹头;35、零件夹头;4、X轴直线运动机构;41、直线导轨付;42、伺服电机;43、滚珠丝杆;44、滑动板;441、导向槽;45、滑块;5、Y轴直线运动机构;51、支撑座;52、螺杆;6、转动机构;61、旋转主轴;611、滑条;62、轴套座;63、皮带轮罩壳;64、电机安装座;65、主轴电机;7、气缸顶出机构;71、气缸安装座;72、气缸;73、滑动杆;731、滑槽;8、零件夹头付。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一
如图1、图2所示,本实施例公开了一种高速卧式三轴快速对位旋转焊接装置,包括防护外壳1、摩擦焊机机架2、快速夹头机构3、X轴直线运动机构4、Y轴直线运动机构5、转动机构6、气缸顶出机构7和零件夹头付8。
本实施例的摩擦焊机机架2、快速夹头机构3、X轴直线运动机构4、Y轴直线运动机构5、转动机构6、气缸顶出机构7和零件夹头付8设置在防护外壳1(图中未示出)内,本实施例的防护外壳1具体采用金属成型加工的一体化防护罩体及三面可推拉门结构。
如图1所示,并具体以图1的方位为参照,摩擦焊机机架2采用现有的钢加和钢板并通过焊接和螺接技术拼接而成,且摩擦焊机机架2设计又六条支撑腿、高稳定钢构支撑面及配重块,使焊接机及整个装置重心位于设备中心,摩擦焊机机架2的顶部采用的是钢板,用于支撑X轴直线运动机构4、Y轴直线运动机构5、转动机构6、气缸顶出机构7和零件夹头付8等机构。
如图1所示,快速夹头机构3包括安装座31、转动电机32、丝杆组件33、管夹头34和零件夹头35;
本实施例的安装座31为U型框架结构,安装座31竖直安装在摩擦焊机机架2顶部右侧,保证安装座31的U型口朝左侧,安装座31的底部可以直接焊接在摩擦焊机机架2顶部右侧,也可以采用螺栓或者螺钉与摩擦焊机机架2顶部右侧固定连接;
如图1所示,并具体以图1的方位参照,转动电机32采用电机支架并配以螺栓或者螺钉安装在安装座31底部,且转动电机32的输出轴向上伸长;丝杆组件33包括配套的丝杆和丝母,丝杆组件33的丝杆下端与转动电机32的输出轴端部焊接固定,丝杆组件33的丝母套设在安装座31的U型腔内并与安装座31的U型腔内壁滑动配合;管夹头34右端与丝杆组件33的丝母左侧焊接固定,也可以采用螺栓或者螺钉固定连接;零件夹头35采用螺栓或者螺钉安装在零件夹头35左侧。
如图1所示,X轴直线运动机构4包括直线导轨付41、伺服电机42、滚珠丝杆43、滑动板44和滑块45;
如图1所示,本实施例的直线导轨付41为一对对称的直线导轨,两个直线导轨分别采用螺栓或者螺钉安装在摩擦焊机机架2顶部左侧前后两端,直线导轨页可以直接焊接在摩擦焊机机架2上;伺服电机42采用安装架并配以螺栓安装在固定在摩擦焊机机架2的顶部钢板的左端;滚珠丝杆43的丝杆左端与伺服电机42的输出轴右端焊接固定,滚珠丝杆43的滚珠与滑动板44底部焊接固定,也可以采用螺栓或者螺钉固定连接;对应的,本实施例的滑块45也设置有两块,两个滑块45分别焊接在,也可以采用螺栓或者螺钉安装在滑动板44底部的前后两侧,且两个滑块45分别套设在直线导轨付41的两个直线导轨上,并与两个直线导轨在其长度方向上滑动配合;
如图1所示,本实施例的滑动板44顶部还设置有导向槽441。
如图1、图2所示,并具体以图1的方位为参照,Y轴直线运动机构5包括支撑座51和螺杆52;支撑座51套设在导向槽441内并与导向槽441在其长度方向上滑动配合;螺杆52套设在支撑座51内部并与支撑座51内部螺纹配合,螺杆52两端通过轴承座与滑动板44两端转动连接,两边的轴承座与分别采用螺栓或者螺钉与滑动板44前后两端固定连接,也可以直接与滑动板44前后两端焊接固定。
如图1、图2所示,转动机构6包括旋转主轴61、轴套座62、皮带轮罩壳63、电机安装座64和主轴电机65;
如图1所示,并具体以图1的方位为参照,轴套座62固定在支撑座51顶部,轴套座62的底部与支撑座51顶部焊接固定,也可以采用螺栓或者螺钉连接的方式固定连接;皮带轮罩壳63设置在轴套座62左侧,皮带轮罩壳63的外壳与轴套座62顶部左侧壁焊接固定,也可以采用螺栓或者螺钉固定连接,电机安装座64设置在轴套座62右侧,电机安装座64与轴套座62顶部右侧壁缓解固定,也可以采用螺栓或者螺钉固定连接;主轴电机65采用螺栓或者螺钉安装在电机安装座64上,且主轴电机65的输出轴通过皮带轮罩壳63的皮带带轮与旋转主轴61转动连接;
如图4所示,本实施例的旋转主轴61内部中空的结构,且旋转主轴61的内孔壁上焊接有沿其长度方向上分布的滑条611。
如图1所示,并具体以图1的方位参照,气缸顶出机构7包括气缸安装座71、气缸72和滑动杆73;气缸安装座71采用螺栓或者螺钉安装在轴套座62左侧;气缸72采用螺栓或者螺钉安装在气缸安装座71上;滑动杆73左端与气缸72的活塞杆右端焊接固定,滑动杆73右端伸入旋转主轴61的内孔中;
如图4所示,本实施例的滑动杆73两侧开设有滑槽731,且滑槽731与旋转主轴61内孔壁上的滑条611滑动配合。
如图1、图2所示,零件夹头付8连接旋转主轴61右端,且零件夹头付8与气缸顶出机构7的滑动杆73右端活动连接,滑动杆73向右滑动与零件夹头付8接触进而实现零部件夹持与松卸。
本发明还设置有PLC程控系统,PLC程控系统包括了可视化操作界面及使用软件语言设计的程序化控制流程。
本实施例的工作原理是:本发明提供一种高速卧式三轴快速对位旋转焊接装置,首先依次将快速夹头机构3、X轴直线运动机构4、Y轴直线运动机构5、转动机构6、气缸顶出机构7和零件夹头付8装配在摩擦焊机机架2上;使用时,先打开防护外壳1的推拉门,然后将需要焊接的接头装配到零件夹头付8上,将需要焊接的圆管装配到管夹头34上,微小量调节X轴直线运动机构4、Y轴直线运动机构5,启动伺服电机42,伺服电机42的输出轴转动带动滚珠丝杆43转动,进而带动滑动板44在直线导轨付41上沿X轴方向移动;然后手动转动螺杆52,进而使得支撑座51带动转动机构6沿Y轴方向移动,直到旋转主轴61与直线导轨付41在X轴方向同轴度优于2丝以上;继续通过微调快速夹头机构3,启动转动电机32,转动电机32的输出轴转动带动丝杆组件33转动进而带动管夹头34和零件夹头35沿Z轴方向移动,使得管夹头34、旋转主轴61、直线导轨付41在x轴方向同轴度优于2丝以上,使得接头与圆管同心度达到1丝以上,通过PLC程控系统控制主轴电机65的转速,启动气缸顶出机构7,气缸72的活塞杆推动滑动杆73在旋转主轴61内左右滑动,进而推动零件夹头付8上的接头与管夹头34上的圆管快速焊接。
本发明相比现有技术存在以下优点:其一,本发明通过微小量调节Y轴直线运动机构5,直到旋转主轴61与X轴直线运动机构4在x轴方向同轴度优于2丝以上;然后通过微调快速夹头机构3,使得快速夹头机构3、旋转主轴61、X轴直线运动机构4在x轴方向同轴度优于2丝以上,进而可以实现高熔点的特种塑料熔化焊接;可以实现特种塑料的局部焊接而不需要整体零部件加热;可以实现设计接头的圆柱侧面焊接,焊接接触面积较传统焊接方法面积最大,有效保障焊后零部件连接处的强度;可以实现零部件大长度焊接,根据装置所处环境,零部件的圆管部分可以实现3-5米长度焊接;可以实现不同外径、外形设计的接头和圆管焊接,通过设计可更换快速装配夹头系统;其二,本发明通过快速夹头机构3、X轴直线运动机构4、Y轴直线运动机构5的设置,可实现三轴快速调整对位;其三、本发明的主轴电机65、旋转主轴61和气缸顶出机构7共同实现进给精度±0.01mm,进给速度可在0-0.20m/s范围内精准设计调节。
实施例二
本实施例与上述实施例的区别在于:本实施例使用一种高速卧式三轴快速对位旋转焊接装置焊接专利专利号:CN111550633A所示的接头和圆管付,接头的内径12
首先,安装装配配套的零件夹头付8,在气缸顶出机构7配合下装配所需焊接的接头,在快速夹头机构3装配所需的圆管;同规格、有批量焊接的第一次焊接时,微小量调节Y轴直线运动机构5,使得接头与圆管同心度达到1丝以上。
然后,在PLC程控系统=的可视化界面上设置主轴电机65的转速为6000r/min,设置气缸顶出机构7进给速度0.15m/s,进给深度9.98±0.01mm;
最后,释放气缸顶出机构7,解开快速夹头机构3,保存上述设置的参数程序。
实施例三
本实施例与上述实施例的区别在于:本实施例使用一种高速卧式三轴快速对位旋转焊接装置焊接接头和圆管,接头的内径25
首先,安装装配配套的零件夹头付8,在气缸顶出机构7配合下装配所需焊接的接头,在快速夹头机构3装配所需的圆管;同规格、有批量焊接的第一次焊接时,微小量调节Y轴直线运动机构5,使得接头与圆管同心度达到2丝以上。
然后,在PLC程控系统=的可视化界面上设置主轴电机65的转速为8000r/min,设置气缸顶出机构7进给速度0.18m/s,进给深度14.96±0.01mm;
最后,释放气缸顶出机构7,解开快速夹头机构3,保存上述设置的参数程序。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种高速卧式三轴快速对位旋转焊接装置及其应用
- 一种高速卧式三轴快速对位旋转焊接装置