队列分析方法及其图像监控设备
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及一种队列分析方法及其图像监控设备,特别是有关一种可用来判断后方对象是否与前方对象属于同队列的队列分析方法及其图像监控设备。
背景技术
传统的排队分析方法设定数值固定的距离门槛与时间门槛,若后方顾客与前方顾客的间距小于距离门槛、且后方顾客停留时间超出时间门槛,认定后方顾客属于前方顾客的所在队伍里。若前方顾客前进时,后方顾客没有跟着移动、稍微拉开与前方顾客的间距,可能导致系统判断间距大于距离门槛,认定后方顾客不属于前方顾客的所在队伍。或者,若前方顾客没有移动,后方顾客退后让开空间给路人通过,一样会拉开与前方顾客的间距,也可能导致系统判断间距大于距离门槛,认定后方顾客不属于前方顾客的所在队伍。因此,如何设计一种能随着特定因素调整距离门槛、避免队伍断裂的排队分析方法,便为相关监控产业的发展目标。
发明内容
本发明涉及一种可用来判断后方对象是否与前方对象属于同队列的队列分析方法及其图像监控设备。
本发明进一步公开一种队列分析方法,用来判断后方对象是否与前方对象属于同队列。该队列分析方法包括有计算该后方对象与该前方对象的角度差及间距,利用该角度差将原始间距门槛调整为修正间距门槛,将该间距与该修正间距门槛进行比较,以及若该间距小于该修正间距门槛,则判断该后方对象与该前方对象属于同队列。
本发明还公开一种图像监控设备,包括有图像取得器以及运算处理器。该图像取得器用来取得图像。该运算处理器电连接该图像取得器,该运算处理器分析该图像以判断该图像中的后方对象与前方对象是否属于同队列,意即计算该后方对象与该前方对象的角度差及间距,利用该角度差将原始间距门槛调整为修正间距门槛,将该间距与该修正间距门槛进行比较,以及若该间距小于该修正间距门槛,则判断该后方对象与该前方对象属于同队列。
本发明的队列分析方法及其图像监控设备考虑了排队对象的身体面向、停滞时间、及身后聚集人数等因素,适应性地调整间距门槛,确保在特定情境下仍能保持队列完整性、不致误判而中断。前述说明提及的情境是后方对象与前方对象的间距虽然超出原始间距门槛,但是若后方对象面向前方对象(意即角度差较小)、或是后方对象的停滞时间长(意即后方对象有意识地排队)、或是后方对象的背后聚集人数众多(意即多数对象有秩序地等待),可将原始间距门槛放大为修正间距门槛,提高后方对象计入前方对象所在队列的机率。另一种情境是后方对象稍微远离前方对象,而且更接近旁边的另一队列;但是后方对象面向前方对象(角度差较小)、背向或侧向另一队列(与另一队列对象的角度差较大),这时本发明便能放大本队列的间距门槛、并且缩短另一队列的间距门槛,可以更准确地判断后方对象不属于另一队列,而是划分到与前方对象相同的队列里。
附图说明
图1为本发明实施例的图像监控设备的功能方块图。
图2为本发明实施例的图像监控设备的安装示意图。
图3为本发明实施例的图像监控设备所取得图像的示意图。
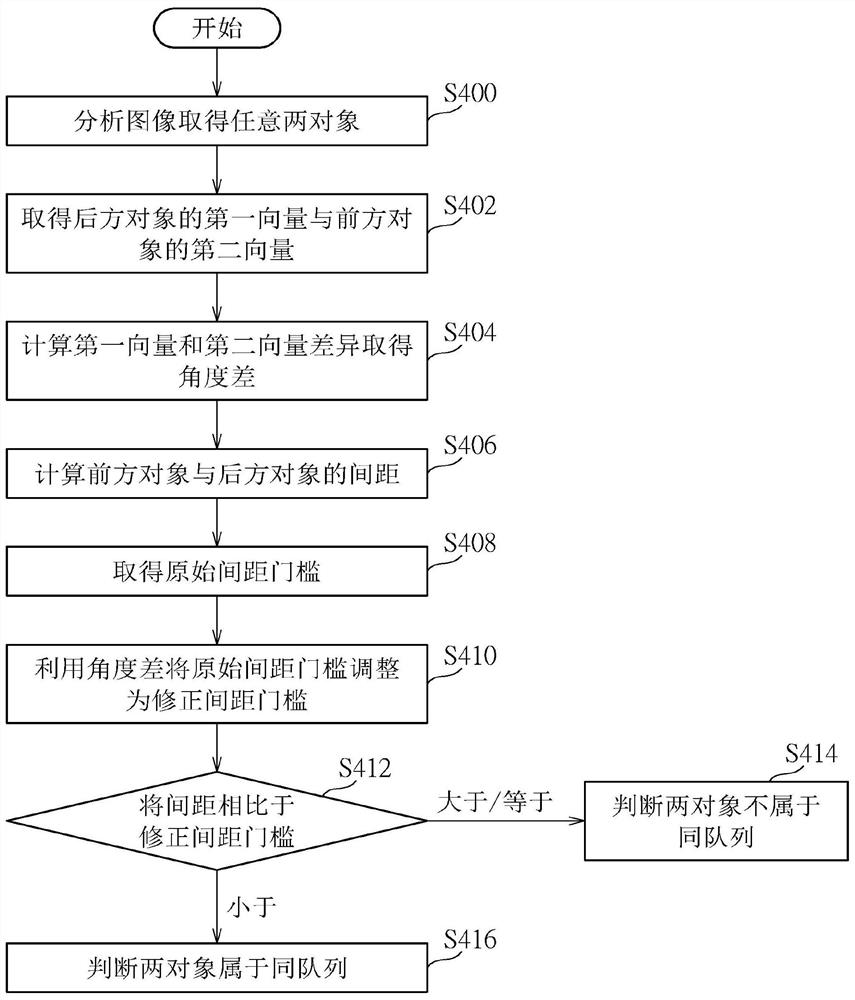
图4为本发明实施例的队列分析方法的流程图。
其中,附图标记说明如下:
10 图像监控设备
12 图像取得器
14 运算处理器
O 物件
O_f 前方物件
O_r、O_r’ 后方物件
d 物件间距
v1 第一向量
v2 第二向量
步骤S400、S402、S404、S406、S408、S410、S412、S414、S416
具体实施方式
请参阅图1至图3,图1为本发明实施例的图像监控设备10的功能方块图,图2为本发明实施例的图像监控设备10的安装示意图,图3为本发明实施例的图像监控设备10所取得图像I的示意图。图像监控设备10可包括图像取得器12以及运算处理器14。图像监控设备10一般会设置在商场柜台或自动贩物/售票机附近,用来侦测监控范围R内的对象O,例如顾客排队信息。图像取得器12用来取得图像监控设备10所针对监控范围R的图像I。运算处理器14可通过有线或无线方式电连接图像取得器12。运算处理器14分析图像I内多个对象O的间距以判断队列状态。
请参阅图1至图4,图4为本发明实施例的队列分析方法的流程图。图4所述的队列分析方法可适用于图1与图2所示的图像监控设备10。队列分析方法可先定义一个起点范围,例如图像I内的售票机,然后从起点范围逐个分析前后两个对象O,判断对象的间是否形成队列。首先,执行步骤S400,分析图像I以取得任意两个对象,例如前方对象O_f与后方对象O_r。接着,执行步骤S402、S404与S406,取得后方对象O_r的第一向量v1与前方对象O_f的第二向量v2,计算第一向量v1和第二向量v2的间差异取得角度差θ,并且另行计算前方对象O_f与后方对象O_r的间距d。
步骤S400中,任意两个对象可以是相邻对象,如图2所示的前方对象O_f与后方对象O_r的间没有其它物件。或者,任意两个对象也可以是非相邻对象,例如图2所示的前方对象O_f与后方对象O_r’;只要前方对象O_f与后方对象O_r’的间的对象数量低于预定值,就能应用本发明的队列分析方法去判断这两个前后对象O是否属于同一队列。预定值预先储存在图像监控设备10的记忆单元(未示于图中),其数值为正整数,可根据图像监控设备10的应用场所而相应变化,于此不再详加说明。
本发明的图像监控设备10通常设置在天花板,因此图像I会撷取到多个对象O的俯视图案。队列分析方法可选择性利用特征分析估测或神经网络训练等技术判断各对象O的面向,取得各对象O的向量值;然实际应用不限于此,只要能分析对象面向的各种图像处理技术都属于本发明队列分析方法的设计范畴。
接下来,队列分析方法执行步骤S408与S410,从图像监控设备10的记忆单元(未示于图中)取得原始间距门槛Th1,并利用角度差θ将原始间距门槛Th1调整为修正间距门槛Th2。最后,步骤S412将间距d与修正间距门槛Th2进行比较。若间距d大于或等于修正间距门槛Th2,表示后方对象O_r远离前方对象O_f,执行步骤S414以判断两对象O_r与O_f不是同队列;若间距d小于修正间距门槛Th2,执行步骤S416判断后方对象O_r与前方对象O_f属于相同队列。
在实际情境中,排队顾客不会一直面向柜台或售票机,可能转身与他人谈话,也可能低头操作手机而无意地拉开与前人的距离,也可能刻意拉开与前人距离以让出空间给他人通过。为了避免排队顾客的间因距离过远而认定队列中断,本发明的队列分析方法可利用顾客的身体面向自适应地调整原始间距门槛Th1,只要前后两对象的角度差落在容许范围内,就会将原始间距门槛Th1放大为修正间距门槛Th2,以此提高前后两对象归属为相同队列的机率。
关于步骤S410,队列分析方法利用角度函数进行间距门槛的调整,如公式一。图像监控设备10的记忆单元可以预先储存一组或多组角度函数及其角度权重k。若记忆单元只有一组角度函数与角度权重k,队列分析方法直接将角度差θ与角度权重k代入角度函数,得到角度校正值,原始间距门槛Th1通过角度校正值即能调整为修正间距门槛Th2;若记忆单元具有多组角度函数与角度权重k,队列分析方法可依据图像监控设备10所在场景选择一组适合的角度函数及角度权重k,同样利用角度差θ的代入结果计算出对应的修正间距门槛Th2。
举例来说,角度函数可以是余弦函数、或是与余弦函数具有相同或相似转换特性的任意函数,角度校正值则可为角度权重k和余弦函数值的乘积或其特定运算值。此处的相同或相似转换特性是指余弦函数值能随着角度差θ变化(θ=0°~180°)而从极大值转化为极小值;因此,若后方对象O_r正面朝向前方对象O_f,角度差θ较小,原始间距门槛Th1可放大为修正间距门槛Th2;若后方对象O_r背向前方对象O_f,角度差θ放大,原始间距门槛Th1则会缩短成修正间距门槛Th2。在其它的可能实施例中,本发明可在后方对象O_r正面朝向前方对象O_f时放大原始间距门槛Th1成为修正间距门槛Th2,但在后方对象O_r背向前方对象O_f时,维持原始间距门槛Th1而不进行调整,其变化端视实际需求而定。
Th2=Th1×(1+k×cosθ) 公式一
除了身体面向的特点,本发明的图像监控设备10还可进一步利用其它因素对间距门槛进行调整。某一种变化态样中,队列分析方法会判断后方对象O_r是否停滞在原地。若否,队列分析方法后方对象O_r判断不属于前方对象O_f的所在队列、仅利用后方对象O_r相对于前方对象O_f的角度差θ调整间距门槛;若是,记录并取得停滞时间t。只要停滞时间t超出等待时间门槛,停滞时间t即可代入默认的时间函数,如公式二,并通过时间权重m取得时间校正值。最后,队列分析方法便能利用角度校正值和时间校正值,将原始间距门槛Th1调整为修正间距门槛Th2。举例来说,时间函数可为正切函数,时间校正值则为时间权重m与正切函数值的乘积。
正切函数的特性是停滞时间t较短时,所计算出的时间校正值较小,停滞时间t拉长,计算出的时间校正值则相应大幅增加,才能在后方对象O_r的长时间等待下,将原始间距门槛Th1放大为修正间距门槛Th2;然其实际应用不限于此,只要具有与正切函数相同或相似转换特性的任意函数,皆能套用在本发明的队列分析方法。
如图2所示,如果后方对象O_r的停滞时间t较长、且又面向前方对象O_f,表示后方对象O_r与前方对象O_f属于同队列的可能性极高。故本发明设计出时间函数与时间权重m的修正概念,当停滞时间t越久,原始间距门槛Th1的放大或增加比例越高,可换算出较长的修正间距门槛Th2;即使后方对象O_r稍微远离前方对象O_f,也能因较长的修正间距门槛Th2归类到前方对象O_f的所在队列。
Th2=Th1×(1+k×cosθ×(1+m×tanh(t))) 公式二
另一种变化态样中,队列分析方法会分析及取得后方对象O_r背向前方对象O_f的一侧的对象排列数量g,如图2所示后方对象O_r背后的四个物件O。接着,队列分析方法取得数量权重n与数量函数,如公式三,将对象排列数量g代入数量函数,并搭配数量权重n计算其数量校正值,即能利用角度校正值、时间校正值和数量校正值将原始间距门槛Th1调整为修正间距门槛Th2。举例来说,数量函数可为正切函数,数量校正值则是数量权重n与正切函数值的乘积:正切函数的特性如前所述,数量函数的实际应用不限于此,端视设计需求而定。
请参照图2,如果后方对象O_r面向前方对象O_f,且其背面排有许多其它对象,表示后方对象O_r及其背后对象同属于前方对象O_f所在队列的机率极高。因此本发明设计了数量函数与数量权重n的修正概念,背后的对象排列数量g越多,原始间距门槛Th1的放大或增加比例越高,可换算出较长的修正间距门槛Th2;即使后方对象O_r稍微远离前方对象O_f,也能因较长的修正间距门槛Th2,判定后方对象O_r与前方对象O_f属于同一队列。
特别一提的是,虽然本发明的队列分析方法提供了只考虑角度差θ的第一实施态样、考虑角度差θ与停滞时间t的第二实施态样、及考虑角度差θ与停滞时间t与对象排列数量g的第三实施态样,但实际应用不限于此。队列分析方法也可以只考虑角度差θ与对象排列数量g、或是综合考虑角度差θ和停滞时间t与对象排列数量g及其以外的其它因素。
Th2=Th1×(1+k×cosθ×(1+m×tanh(t)+n×tanh(g))) 公式三
本发明的队列分析方法及其图像监控设备考虑了排队对象的身体面向、停滞时间、及身后聚集人数等因素,适应性地调整间距门槛,确保在特定情境下仍能保持队列完整性、不致误判而中断。前述说明提及的情境是后方对象与前方对象的间距虽然超出原始间距门槛,但是若后方对象面向前方对象(意即角度差较小)、或是后方对象的停滞时间长(意即后方对象有意识地排队)、或是后方对象的背后聚集人数众多(意即多数对象有秩序地等待),可将原始间距门槛放大为修正间距门槛,提高后方对象计入前方对象所在队列的机率。另一种情境是后方对象稍微远离前方对象,而且更接近旁边的另一队列;但是后方对象面向前方对象(角度差较小)、背向或侧向另一队列(与另一队列对象的角度差较大),这时本发明便能放大本队列的间距门槛、并且缩短另一队列的间距门槛,可以更准确地判断后方对象不属于另一队列,而是划分到与前方对象相同的队列里。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 队列分析方法与图像监控设备
- 队列分析方法及其图像监控设备