一种人工势场和虚拟领航者的无人机编队形成和保持方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明属于无人机编队技术领域,尤其涉及在编队形成过程中,复杂环境下一种人工势场和虚拟领航者的无人机编队形成和保持方法。
背景技术
单架无人机的任务载荷有限,且功能单一,多架无人机可以通过能力互补和行动协调实现系统效能提升,提高执行率,在军用和民用领域有着广泛的应用,如交通监控、娱乐表演和军事侦察等;无人机编队是多机协同任务的基础,具有很高的研究价值。
无人机编队执行任务的第一步是多无人机编队的形成和保持,编队的形成是指多无人机从不同的初始状态演变成一定几何形状的过程,并能稳定维持该形状。
目前无人机编队的形成过程中很少考虑障碍物因素,或者障碍物是静止的,即使在编队的形成过程中考虑障碍物的避障问题,但最终形成编队的瞬间是某种静态队形,不能很好满足实际需求,为了更加符合实际情况,本文所述方法能够使无人机在编队形成过程中实现动态障碍物的避障,并且编队形成的瞬间是动态飞行的,可以在瞬息万变的信息化战场上,满足无人机编队的快速性和多变性,具有重要的军事应用前景。
发明内容
本发明的目的在于完善现有方法的不足,提供复杂环境下一种人工势场和虚拟领航者的无人机编队形成和保持方法,能够在编队形成过程中实现避障,且形成期望队形的瞬间是动态飞行状态,具有快速性和多变性。
为了解决现有技术中存在的技术问题,本发明采用如下技术方案实施:
一种人工势场和虚拟领航者的无人机编队形成和保持方法,包括如下步骤:
S1、设置编队无人机的期望队形获得虚拟领航者无人机和期望无人机的位置信息;
S2、初始化编队无人机、期望无人机和虚拟领航者无人机属性;
S3、根据初始化信息构建编队无人机和期望无人机的吸引力模型、编队无人机之间的排斥力模型以及编队无人机与周围障碍物的排斥力模型;
S4、根据吸引力和排斥力模型对编队无人机速度、位置信息更新;
S5、根据初始化设置信息对虚拟领航者及期望无人机速度、位置信息更新;
S6、判断编队无人机和期望无人机的速度和位置是否相同,若满足条件则形成编队并保持飞行;否则返回步骤S4。
进一步,所述吸引力模型通过如下步骤构建:
设置编队无人机的吸引力模型:即第i架编队无人机在引力场中受到的吸引力定义如下
其中,
进一步,所述排斥力模型通过如下步骤构建:设置编队无人机的排斥力模型:编队无人机在形成编队过程中,能防止无人机之间的碰撞,避开飞行环境中的动态障碍物;编队无人机在斥力场中受到的排斥力定义如下:
编队无人机之间的避碰:在每个编队无人机周围设置一个圆形避碰区域,其中区域半径为R,当编队无人机之间的距离小于区域半径R时,会受到排斥力,规定R小于编队无人机期望队形中任意两架期望无人机间的最小距离;
根据避障区域半径R,设置编队无人机i由周围编队无人机j产生的斥场函数,进而计算第i架无人机的排斥力:
其中,
编队无人机在飞行过程中会受到周围动态障碍物的影响,设置障碍物斥力场的区域半径为D,当编队无人机与障碍物的距离小于D时,会受到由障碍物产生的排斥力,第i架编队无人机受到障碍物斥力场产生的排斥力:
其中,
编队无人机受到的排斥力由周围编队无人机和动态障碍物的斥力场产生,第i架编队无人机受到的总排斥力:
进一步,根据吸引力模型和排斥力模型构建合力模型:即第i架编队无人机受到的合力模型:
有益效果
本发明采用人工势场和虚拟领航者相结合,借助虚拟领航者可保持稳定的期望队形,编队无人机在人工势场法产生的势场力作用下进行避障并形成编队,并且最终的编队队形是动态飞行的,可以在瞬息万变的信息化战场上,满足无人机编队的快速性和多变性,另外,还考虑到编队形成过程中障碍物的影响,更符合实际情形。
附图说明
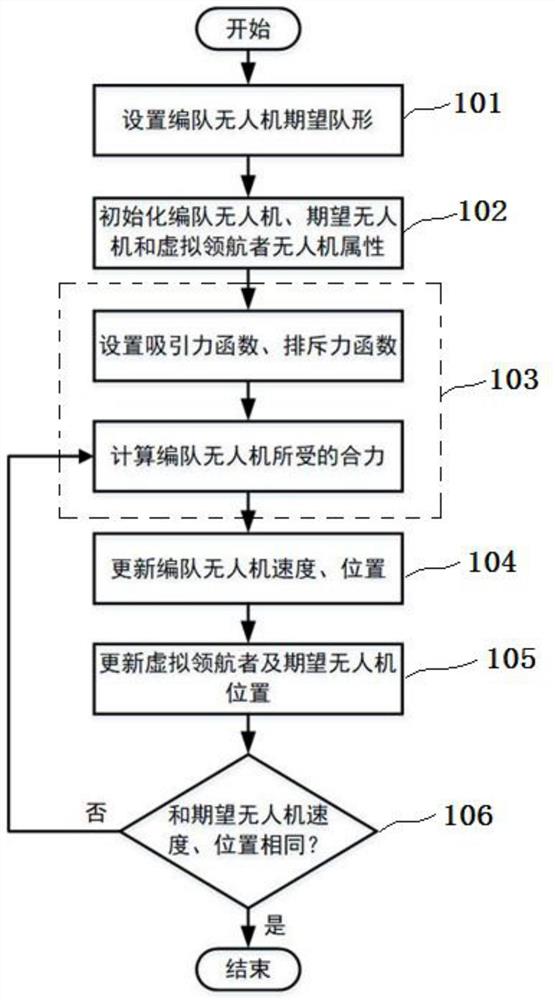
图1是复杂环境下一种人工势场和虚拟领航者的无人机编队形成和保持方法的流程图;
图2是编队无人机、障碍物以及期望队形的位置分布示意图。
图3是第i架编队无人机在编队形成飞行过程中的受力示意图。
图4是实施案例中的仿真结果。
图5是实施案例仿真过程中编队无人机和动态障碍物的避碰说明1。
图6是实施案例仿真过程中编队无人机和动态障碍物的避碰说明2。
具体实施方式
为了更好的理解本发明的技术方案,下面结合附图和具体实施例对本发明进行详细描述。
本发明实施例给出复杂环境下一种人工势场和虚拟领航者的无人机编队形成和保持方法,具体流程如图1所示,
S1、设置编队无人机的期望队形获得虚拟领航者无人机和期望无人机的位置信息;由一架虚拟领航者无人机和m架期望无人机组成,其中m架期望无人机组成期望队形,如三角形、矩形等,虚拟领航者位于期望队形的中心位置。
S2、初始化编队无人机、期望无人机和虚拟领航者无人机属性;根据编队需求,确定编队无人机数量m,相应地,存在m架期望无人机,以及一架虚拟领航者无人机,并对其位置和速度进行初始化设置;具体过程如下:
2.1)初始化编队无人机的位置P
2.2)初始化虚拟领航者无人机的位置P
S3、根据初始化信息构建编队无人机和期望无人机的吸引力模型、编队无人机之间的排斥力模型以及编队无人机与周围障碍物的排斥力模型;
3.1、设置编队无人机的吸引力模型:即第i架编队无人机在引力场中受到的吸引力定义如下
其中,
3.2、设置编队无人机的排斥力模型:编队无人机在形成编队过程中,能防止无人机之间的碰撞,避开飞行环境中的动态障碍物;编队无人机在斥力场中受到的排斥力定义如下:
编队无人机之间的避碰:在每个编队无人机周围设置一个圆形避碰区域,其中区域半径为R,当编队无人机之间的距离小于区域半径R时,会受到排斥力,规定R小于编队无人机期望队形中任意两架期望无人机间的最小距离;
根据避障区域半径R,设置编队无人机i由周围编队无人机j产生的斥场函数,进而计算第i架无人机的排斥力:
其中,
编队无人机在飞行过程中会受到周围动态障碍物的影响,设置障碍物斥力场的区域半径为D,当编队无人机与障碍物的距离小于D时,会受到由障碍物产生的排斥力,第i架编队无人机受到障碍物斥力场产生的排斥力:
其中,
编队无人机受到的排斥力由周围编队无人机和动态障碍物的斥力场产生,第i架编队无人机受到的总排斥力:
3.3、第i架编队无人机受到的合力:
S4、根据吸引力和排斥力模型对编队无人机速度、位置信息更新;
S5、根据初始化设置信息对虚拟领航者及期望无人机速度、位置信息更新;
包括:
根据编队无人机二阶运动学模型:
编队无人机由于加速度的改变,速度会相应变化,每隔一秒更新自身速度。
编队无人机由于速度的改变,位置会相应变化,每隔一秒更新自身位置。
期望无人机跟随虚拟领航者无人机飞行,同样每隔一秒更新自身位置。
S6、判断编队无人机和期望无人机的速度和位置是否相同,若满足条件则形成编队并保持飞行;否则返回步骤S4。
本发明实施例以二维空间中四架编队无人机形成一个正方形的编队形状为例,具体步骤如下:
1)设置编队无人机的期望队形:由一架虚拟领航者无人机和4架期望无人机组成,其中4架期望无人机组成正方形编队,虚拟领航者位于期望队形的中心位置。
2)初始化编队无人机的位置和速度,如图2所示,四架编队无人机的位置分别为P
3)初始化期望无人机以及虚拟领航者无人机的位置和速度,如图2所示,四架期望无人机组正方形编队,且虚拟领航者无人机初始位置P
4)设置编队无人机飞行过程中的动态障碍物,如图2所示,灰色圆形均为动态障碍物,其初始位置分布为(7,12)、(11,9)、(16,16)、(21,20)和(20,11),5个障碍物均在Y轴方向上做振幅为2.2的简谐运动(可选)。
5)设置编队无人机的吸引力函数:定义引力场只受编队无人机与对应期望无人机的相对位置,以及编队无人机与虚拟领航者无人机的相对速度影响,与传统吸引力不同,改进后的吸引力考虑速度因素,编队的快速性和稳定性表现更佳。第i架编队无人机在引力场中受到的吸引力定义如下:
其中,k
6)编队无人机之间的避碰:在每个编队无人机周围设置一个圆形避碰区域,其中区域半径为R,当编队无人机之间的距离小于区域半径R时,会受到排斥力,规定R小于编队无人机期望队形中任意两架期望无人机间的最小距离。
7)根据避障区域半径R,设置编队无人机i由周围编队无人机j产生的斥场函数,进而计算第i架无人机的排斥力:
其中,k
8)编队无人机在飞行过程中会受到周围动态障碍物的影响,设置障碍物斥力场的区域半径为D,当编队无人机与障碍物的距离小于D时,会受到由障碍物产生的排斥力,第i架编队无人机受到障碍物斥力场产生的排斥力:
其中,
9)编队无人机受到的排斥力由周围编队无人机和动态障碍物的斥力场产生,第i架编队无人机受到的总排斥力:
10)第i架编队无人机受到的合力:
11)根据编队无人机二阶运动学模型:
12)编队无人机由于加速度的改变,速度会相应变化,每隔一秒更新自身速度。
13)编队无人机由于速度的改变,位置会相应变化,每隔一秒更新自身位置。
14)期望无人机跟随虚拟领航者无人机飞行,同样每隔一秒更新自身位置。
15)对比编队无人机与期望无人机速度是否相同。
16)对比编队无人机与期望无人机位置是否相同。
17)若步骤15)和步骤16)不能同时满足,执行步骤5)至步骤10),进而不断更新编队无人机的加速度、速度及位置。
18)若步骤15)和步骤16)不能同时满足,执行步骤5)至步骤10),进而不断更新期望无人机和虚拟领航者无人机的位置。
19)若步骤15)和步骤16)能同时满足,表示达到期望队形,可形成编队并保持飞行。
如图3所示,其为本发明案例第i架编队无人机在编队形成飞行过程中的受力示意图,黑色实心圆圈表示编队无人机,黑色空心圆圈表示期望无人机,灰色实心三角形表示障碍物。从图中可以看出,编队无人机受到期望无人机的吸引力,在一定范围内,编队无人机受到周围编队无人机和障碍物的排斥力。
本发明案例最终仿真结果如图4所示,从图中可以看出,4架编队无人机从各自初始位置出发,在周围编队无人机、动态障碍物以及期望无人机的势场力作用下,安全无碰撞、高效的形成预期的正方形编队,且形成预期队形的瞬间是动态飞行状态。仿真结果验证了本发明提出的在复杂环境下一种基于人工势场和虚拟领航者的编队形成和保持方法。
编队无人机在形成正方形编队过程中,其飞行路径不存在“碰撞”情况,但图4中红色正方形和三角形标记处,编队无人机和动态障碍物之间有明显的“碰撞”,由于二维仿真展示有限,动态障碍物在做简谐运动过程中所造成的错觉,动态障碍物和编队无人机“碰撞”重叠区域,是不同时刻的位置;在同一时刻,编队无人机和动态障碍物之间不存在碰撞,仿真过程如图5和图6所示。
本发明并不限于上文描述的实施方式。以上对具体实施方式的描述旨在描述和说明本发明的技术方案,上述的具体实施方式仅仅是示意性的,并不是限制性的。在不脱离本发明宗旨和权利要求所保护的范围情况下,本领域的普通技术人员在本发明的启示下还可做出很多形式的具体变换,这些均属于本发明的保护范围之内。
- 一种人工势场和虚拟领航者的无人机编队形成和保持方法
- 一种基于领航者和虚拟领航者的多AUV直线编队控制方法