飞行器航迹角控制方法、系统及存储介质
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及飞行器航迹角控制技术领域,尤其涉及一种飞行器航迹角控制方法、系统及存储介质。
背景技术
飞行器具有飞行环境复杂、参数不确定性程度高以及模型非线性强等特性,并随着飞行任务的复杂化,对飞行器控制系统的性能要求越来越高,使得飞行器的非线性控制是控制领域的一个热点,同时也带来了新的挑战。
在诸多的控制模态中,航迹倾角跟踪控制是飞行器控制系统中最重要的控制模态之一,其控制方法优点是抗风干扰特性好,能有效降低扰动气流对飞行控制律的影响。因此,航迹倾角跟踪控制应用于飞行器控制系统设计方面得到广泛使用。另外,在飞行过程中,当飞行器攻角超过某个临界值后,升力系数随攻角增大而减小,会使得飞行器产生失控的俯冲颠簸运动,发动机发生振动,造成飞行器控制系统的失效。
发明内容
本发明的主要目的在于提供一种飞行器航迹角控制方法、系统及存储介质,旨在提升飞行器航迹角控制精度,避免飞行器控制系统失效,提高飞行器的飞行品质和飞行安全特性。
为了达到上述目的,本发明提出一种飞行器航迹角控制方法,所述方法包括以下步骤:
根据飞行器动力模型存在强耦合与高度非线性特性,建立飞行器非线性系统模型;
通过变量代换,将所述飞行器非线性系统模型转化为带有模型参数不确定性的反馈控制模型;
基于屏障李雅普诺夫函数、RBF神经控制理论对飞行器反馈控制模型进行航迹角约束控制。
本发明进一步的技术方案是,所述通过变量代换,将所述飞行器非线性系统模型转化为带有模型参数不确定性的反馈控制模型的步骤包括:
采用屏障李雅普诺夫函数和RBF神经控制理论将所述飞行器非线性系统模型转化为带有模型参数不确定性的反馈控制模型。
本发明进一步的技术方案是,所述根据飞行器动力模型存在强耦合与高度非线性特性,建立飞行器非线性系统模型的步骤包括:
根据飞行器动力模型存在强耦合与高度非线性特性,将飞行器纵向模型表示为:
其中,
本发明进一步的技术方案是,所述采用屏障李雅普诺夫函数和RBF神经控制理论将所述飞行器非线性系统模型转化为带有模型参数不确定性的反馈控制模型的步骤包括:
定义状态
其中,
其中,
本发明进一步的技术方案是,所述基于屏障李雅普诺夫函数、RBF神经控制理论对飞行器反馈控制模型进行航迹角约束控制的步骤包括:
基于屏障李雅普诺夫函数、RBF神经控制理论以及所述反馈控制模型设计自适应动态面控制器,以对飞行器反馈控制模型进行航迹角约束控制。
本发明进一步的技术方案是,所述基于屏障李雅普诺夫函数、RBF神经控制理论对所述反馈控制模型设计自适应动态面控制器,以对飞行器反馈控制模型进行航迹角约束控制的步骤包括:
定义航迹倾角误差变量、攻角误差变量和俯仰角速率误差变量,根据所述航迹倾角误差变量、攻角误差变量和俯仰角速率误差变量设计自适应动态面控制器。
本发明进一步的技术方案是,所述基于屏障李雅普诺夫函数、RBF神经控制理论对飞行器反馈控制模型进行航迹角约束控制的步骤之后还包括:
基于李雅普诺夫理论,对所述自适应动态面控制器给出稳定性理论证明,并通过数字仿真,验证了所述自适应动态面控制器的有效性。
为实现上述目的,本发明还提出一种飞行器航迹角控制系统,所述系统包括存储器、处理器以存储在所述处理器上的飞行器航迹角控制程序,所述飞行器航迹角控制程序被所述处理器运行时执行以下步骤:
根据飞行器动力模型存在强耦合与高度非线性特性,建立飞行器非线性系统模型;
通过变量代换,将所述飞行器非线性系统模型转化为带有模型参数不确定性的反馈控制模型;
基于屏障李雅普诺夫函数、RBF神经控制理论对飞行器反馈控制模型进行航迹角约束控制。
本发明进一步的技术方案是,所述飞行器航迹角控制程序被所述处理器运行时还执行以下步骤:
采用屏障李雅普诺夫函数和RBF神经控制理论将所述飞行器非线性系统模型转化为带有模型参数不确定性的反馈控制模型。
为实现上述目的,本发明还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有飞行器航迹角控制程序,所述飞行器航迹角控制程序被处理器运行时执行如上所述的方法的步骤。
本发明飞行器航迹角控制方法、系统及存储介质的有益效果是:本发明通过上述技术方案,根据飞行器动力模型存在强耦合与高度非线性特性,建立飞行器非线性系统模型;通过变量代换,将所述飞行器非线性系统模型转化为带有模型参数不确定性的反馈控制模型;基于屏障李雅普诺夫函数、RBF神经控制理论对飞行器反馈控制模型进行航迹角约束控制,引入屏障李雅普诺夫函数,能保证飞行器输出航迹倾角、攻角、俯仰角速率信息满足期望的状态约束条件,利用RBF神经理论可充分逼近任意非线性函数性质,可有效性处理由系统模型不确定性给系统带来的影响,基于屏障李雅普诺夫函数和RBF神经控制理论,基于反步控制思想,并结合自适应控制算法,设计了自适应动态面控制器,实现了对飞行器的输出信号约束控制。由此,相对于现有技术,本发明能避免飞行器控制系统失效,从而提升飞行器航迹角控制精度,提高飞行器的飞行品质和飞行安全特性。
附图说明
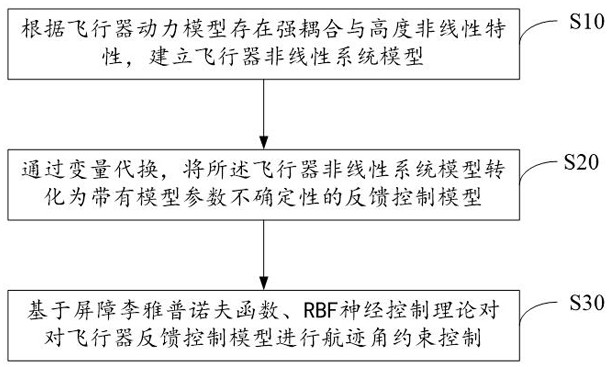
图1是本发明飞行器航迹角控制方法第一实施例的流程示意图;
图2是飞行器纵向模型示意图;
图3是飞行器航迹角跟踪曲线图;
图4是控制信号输入曲线图;
图5是攻角曲线图;
图6是俯仰角速率曲线图。
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。
具体实施方式
应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
目前,大多数针对飞行器进行控制器设计时没有输出状态信号进行约束,为了保证飞行器具有良好的飞行品质、飞行安全等特性,因此,在飞行器航迹角控制时,输出姿态角及姿态角速度都必须满足一定约束条件。本发明提出一种考虑状态约束的飞行器航迹角神经网络动态面控制方法,基于反步法、自适应控制技术及神经控制理论,实现了对飞行器航迹角快速稳定跟踪,并通过引入屏障李雅普诺夫函数,使得攻角、俯仰角速率在一定范围内变化并满足预期的状态约束条件,具有很高的理论与工程应用价值。
具体地,请参照图1,图1是本发明飞行器航迹角控制方法第一实施例的流程示意图。
如图1所示,本实施例中,该飞行器航迹角控制方法包括以下步骤:
步骤S10,根据飞行器动力模型存在强耦合与高度非线性特性,建立飞行器非线性系统模型。
具体地,本实施例考虑飞行器动力学模型存在强耦合与高度非线性特性,其纵向模型如图2所示,则飞行器纵向模型可表示为:
其中,
步骤S20,通过变量代换,将所述飞行器非线性系统模型转化为带有模型参数不确定性的反馈控制模型。
本实施例中,可以采用屏障李雅普诺夫函数和RBF神经控制理论将所述飞行器非线性系统模型转化为带有模型参数不确定性的反馈控制模型。
具体地,定义状态
其中,
式中,
假设1:在式(2)中
假设2:神经网络系统能够有效逼近任意联系非线性函数,一个n输入单输出且中间层有N个神经元的RBF神经网络可以表示为有
式中,
式中,
步骤S30,基于屏障李雅普诺夫函数、RBF神经控制理论对飞行器反馈控制模型进行航迹角约束控制。
具体地,本实施例中,基于屏障李雅普诺夫函数、RBF神经控制理论对所述反馈控制模型设计自适应动态面控制器,以对对飞行器反馈控制模型进行航迹角约束控制。
其中,基于屏障李雅普诺夫函数、RBF神经控制理论对所述反馈控制模型设计自适应动态面控制器的步骤中具体可以包括:
定义航迹倾角误差变量、攻角误差变量和俯仰角速率误差变量,根据所述航迹倾角误差变量、攻角误差变量和俯仰角速率误差变量设计自适应动态面控制器。
其中,对于控制器设计的具体步骤如下:
1.定义航迹倾角误差变量
其中,
对式(5)求导,得:
由于
其中,
为保证航迹角期望的跟踪性能
对式(8)求导可得:
其中,
根据式(9),设计虚拟控制器
其中,
为避免对虚拟控制器
其中,
将式(10)代入式(9)整理可得:
2. 定义攻角误差变量
对式(15)求导得:
由于函数
其中,
为了保证攻角期望的跟踪性能
对
其中,
根据式(19),设计虚拟控制器如下:
其中,
为避免对虚拟控制器
其中,
将式(20)代入式(19)整理可得:
3. 定义俯仰角速率误差变量
对
利用RBF网络对
其中,
为了保证俯仰角速率期望的跟踪性能
对式(28)求导可得:
其中,
根据式(29),设计自适应控制律为:
其中,
定理1:考虑系统(2)且满足假设条件1-2,在控制器(30)和自适应律(31)-(32)作用下,则跟踪误差变量
其中,
证明:定义滤波误差为:
由式(13)、(23),对式(34)可得:
根据式(35)对式(34)求导可得:
根据式(36),并整理可得:
其中,
选取Lyapunov函数为:
其中,
根据式(14),(19)和(29)对式(38)求导可得:
根据
将式(40)-(42)代入式(39)整理可得:
利用Young不等式及下式:
根据式(44),则式(43)可整理为:
进一步可整理为:
其中,
根据:
根据式(47),则式(46)可重新为:
其中,
对式(48)求解可得:
不等式(49)可得到:
进一步可得:
根据(53)-(55)可知,则误差变量
定理1证毕。
本实施例的有益效果是:本实施例通过上述技术方案,根据飞行器动力模型存在强耦合与高度非线性特性,建立飞行器非线性系统模型;通过变量代换,将所述飞行器非线性系统模型转化为带有模型参数不确定性的反馈控制模型;基于屏障李雅普诺夫函数、RBF神经控制理论对飞行器反馈控制模型进行航迹角约束控制,引入屏障李雅普诺夫函数,能保证飞行器输出航迹倾角、攻角、俯仰角速率信息满足期望的状态约束条件,利用RBF神经理论可充分逼近任意非线性函数性质,可有效性处理由系统模型不确定性给系统带来的影响,基于屏障李雅普诺夫函数和RBF神经控制理论,基于反步控制思想,并结合自适应控制算法,设计了自适应动态面控制器,实现了对飞行器的输出信号约束控制。由此,相对于现有技术,本实施例能避免飞行器控制系统失效,从而提升飞行器航迹角控制精度,提高飞行器的飞行品质和飞行安全特性。
进一步的,基于图1所示第一实施例,提出本发明飞行器航迹角控制方法第二实施例,本实施例与图1所示的第一实施例的区别在于,上述步骤S30,基于屏障李雅普诺夫函数、RBF神经控制理论对飞行器反馈控制模型进行航迹角约束控制的步骤之后包括:
步骤S40,基于李雅普诺夫理论,对所述自适应动态面控制器给出稳定性理论证明,并通过数字仿真,验证了所述自适应动态面控制器的有效性。
具体地,设航迹倾角参考轨迹
控制参数选取:
从图3给出的航迹角跟踪曲线仿真结果可知,航迹角在30秒内跟踪误差收敛到附件,且满足控制性能,从图4给出控制输入曲线可知,控制输入U在较短时间内控制输入趋于稳态值。从图5-图6分别给出的攻角和俯仰角速率曲线可知,攻角和俯仰角速率在短时间内趋于稳态值且满足预期的状态约束。即误差变量
本发明飞行器航迹角控制方法的有益效果是:本发明通过上述技术方案,根据飞行器动力模型存在强耦合与高度非线性特性,建立飞行器非线性系统模型;通过变量代换,将所述飞行器非线性系统模型转化为带有模型参数不确定性的反馈控制模型;基于屏障李雅普诺夫函数、RBF神经控制理论对飞行器反馈控制模型进行航迹角约束控制,引入屏障李雅普诺夫函数,能保证飞行器输出航迹倾角、攻角、俯仰角速率信息满足期望的状态约束条件,利用RBF神经理论可充分逼近任意非线性函数性质,可有效性处理由系统模型不确定性给系统带来的影响,基于屏障李雅普诺夫函数和RBF神经控制理论,基于反步控制思想,并结合自适应控制算法,设计了自适应动态面控制器,实现了对飞行器的输出信号约束控制。由此,相对于现有技术,本发明能避免飞行器控制系统失效,从而提升飞行器航迹角控制精度,提高飞行器的飞行品质和飞行安全特性。
为实现上述目的,本发明还提出一种飞行器航迹角控制系统,所述系统包括存储器、处理器以存储在所述处理器上的飞行器航迹角控制程序,所述飞行器航迹角控制程序被所述处理器运行时执行以下步骤:
根据飞行器动力模型存在强耦合与高度非线性特性,建立飞行器非线性系统模型;
通过变量代换,将所述飞行器非线性系统模型转化为带有模型参数不确定性的反馈控制模型;
基于屏障李雅普诺夫函数、RBF神经控制理论对飞行器反馈控制模型进行航迹角约束控制。
进一步的,所述飞行器航迹角控制程序被所述处理器运行时还执行以下步骤:
采用屏障李雅普诺夫函数和RBF神经控制理论将所述飞行器非线性系统模型转化为带有模型参数不确定性的反馈控制模型。
本发明飞行器航迹角控制系统的有益效果是:本发明通过上述技术方案,根据飞行器动力模型存在强耦合与高度非线性特性,建立飞行器非线性系统模型;通过变量代换,将所述飞行器非线性系统模型转化为带有模型参数不确定性的反馈控制模型;基于屏障李雅普诺夫函数、RBF神经控制理论对飞行器反馈控制模型进行航迹角约束控制,引入屏障李雅普诺夫函数,能保证飞行器输出航迹倾角、攻角、俯仰角速率信息满足期望的状态约束条件,利用RBF神经理论可充分逼近任意非线性函数性质,可有效性处理由系统模型不确定性给系统带来的影响,基于屏障李雅普诺夫函数和RBF神经控制理论,基于反步控制思想,并结合自适应控制算法,设计了自适应动态面控制器,实现了对飞行器的输出信号约束控制。由此,相对于现有技术,本实施例能避免飞行器控制系统失效,从而提升飞行器航迹角控制精度,提高飞行器的飞行品质和飞行安全特性。
为实现上述目的,本发明还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有飞行器航迹角控制程序,所述飞行器航迹角控制程序被处理器运行时执行如上实施例所述的方法的步骤,这里不再赘述。
以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
- 飞行器航迹角控制方法、系统及存储介质
- 一种飞行器航迹融合方法、系统和计算机可读存储介质