基于三维探地雷达的预测卷积处理方法
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及三维探地雷达技术领域,尤其是基于三维探地雷达的预测卷积处理方法。
背景技术
探地雷达(Ground Penetrating Radar.GPR)是利用天线发射和接收高频电磁波来探测介质内部物质特性和分布规律的一种地球物理方法。探地雷达早期有多种叫法.如地面探测雷达(Ground—probing Radar)、地下雷达(Sub—surface Radar)、地质雷达(GeoRadar)、脉冲雷达(Impulse Radar)、表面穿透雷达(Surface Penetrating Radar)等,都是指面向地质勘探目标、利用高频脉冲电磁探测地质目标内部结构的一种电磁波方法。由于探地雷达探测具有高精度、高效率以及无损等特点,其被广泛运用于考古、矿产勘查、灾害地质调查、岩土工程勘察、工程质量检测、建筑结构检测以及军事目标探测等领域。
现有技术中的探地雷达的工作频率范围介于1M~1GHz之间,在地下介质中的传播以位移电流为主。虽然探地雷达和地震方法的物理机制和测量的物理量不一样(电磁波和弹性波),但两者的运动学特征一致,遵循形式相似的波动方程,只是其中参数的物理意义不同。这种运动学特征的相似性使得探地雷达方法从数据采集、数据处理(包括处理软件)到数据解释都可借鉴地震勘探的方法技术成果。近年来随着电磁波理论研究的深入,一些电磁特性如极化特性等得到更深入的研究.并在雷达设备、采集技术和数据处理方法等方面得到开发和应用。
随着勘探目标要求的提高,二维剖面测量所能给出剖面上异常目标的埋深、范围等信息已不能满足业界对探测目标延伸走向、空间变化等详细信息的要求。考古目标的规模相对较小,二维剖面法很难使测线正好跨过探测对象,剖面异常的解释也是问题。因此开展三维雷达勘探是考古地球物理应用的趋势和方向,一些商用雷达系统从硬件设备到处理软件都能够支持三维雷达勘探。
目前,现有技术中的探地雷达三维勘探是一种伪三维勘探设计,即采用多条二维剖面组合形成面积性三维数据体,再通过软件处理和显示。对于目前只有一个发射天线和一个接收天线的雷达系统.这种伪三维设计也是一种不错的替代。随着电子技术发展,多通道仪器设备出现将会带来三维雷达勘探技术的革命。然而,探地雷达在工作时,由于其原理性的作用,会收到的重复的反射波,导致对目标的分析与判别出现偏差。因此,需要尽量消除这些重复波对原始数据的影响,还原出真实的电磁波信号。目前现有技术中暂无一个针对于重复反射波信号去除的针对性算法;
因此,急需要提出一种逻辑简单、处理可靠的基于三维探地雷达的预测卷积处理方法。
发明内容
针对上述问题,本发明的目的在于提供基于三维探地雷达的预测卷积处理方法,本发明采用的技术方案如下:
基于三维探地雷达的预测卷积处理方法,包括以下步骤:
采集三维探地雷达的时域雷达信号,并采用傅里叶转换将时域雷达信号转换得到雷达记录频谱,其表达式为:
X(ω)=B(ω)·ξ(ω)
其中,B(ω)表示入射频谱,ξ(ω)表示反射系数频谱;
预设频谱步长为α,根据时窗并求得预测因子C(ω),其表达式为:
其中,
根据预测因子C(ω)与雷达记录频谱X(ω)的乘积求得的重复反射波E(ω),其表达式为:
E(ω)=C(ω)*X(ω)
在雷达记录频谱X(ω)的基础上,减去重复反射波E(ω),得到入射波频谱F(ω),其表达式为:
F(ω)=X(ω)-E(ω)
采用傅里叶转换将入射波频谱F(ω)转换成时域振幅,得到真实的入射频谱。
优选地,所述时窗大小为20ms,且所述频谱步长α取值为2。
与现有技术相比,本发明具有以下有益效果:
(1)本发明巧妙地将原始雷达信号从时域转化到频域,便于之后的重复波形分离工作;其次,根据用户设置的预测步长,求取到预测因子;然后,使用原始雷达记录频谱减去根据预测因子获得的预测重复波形频谱信息可以得到预测纯净入射波频谱;最后,将频域数据还原到时域振幅信号,从而进行后续分析与展示,其逻辑简单、计算工作量少;
(2)本发明巧妙地采用傅里叶转换,将时域信号转成频域,由于原始的雷达信号是在时域中,各类波形的振幅冗杂在一起无法分离,因此需要使用傅里叶变换将时域信号转化到频域后进行处理;
(3)本发明巧妙地设置频谱步长,并求得预测因子和重复反射波,以求得纯净入射波频谱,其有效地分离重复反射波,保证雷达信号处理更可靠;
综上所述,本发明具有逻辑简单、计算工作量少、处理可靠等优点,在三维探地雷达技术领域具有很高的实用价值和推广价值。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需使用的附图作简单介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对保护范围的限定,对于本领域技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
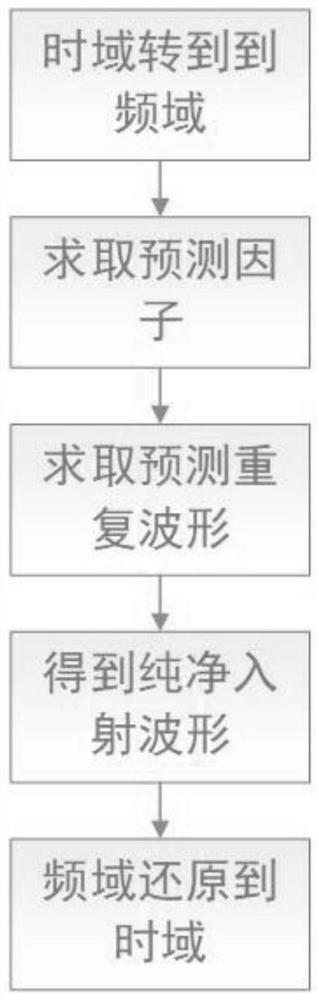
图1为本发明的逻辑流程图。
图2为本发明的原始图像。
图3为本发明去除雷达重复反射波形后图像。
具体实施方式
为使本申请的目的、技术方案和优点更为清楚,下面结合附图和实施例对本发明作进一步说明,本发明的实施方式包括但不限于下列实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本申请保护的范围。
实施例
如图1至图3所示,本实施例提供了一种一种基于三维探地雷达的预测卷积处理方法,首先,获取到原始雷达数据,对其进行傅里叶变换,将时域信号转化到频域;随后,根据预测步长的选去,计算出预测因子;其次,根据求取的预测因子,求取出预测值;然后,根据预测值,在原有雷达信号中减去预测值,得到误差序列,即最后去除掉重复反射波的频域雷达信号;最后,将频域雷达信号还原到时域。
具体来说:
第一步,获取雷达信号,由于原始的雷达信号是在时域中,各类波形的振幅冗杂在一起无法分离,因此需要使用傅里叶变换将时域信号转化到频域后进行处理。设原始雷达序列为x(t),是由纯净的电磁波入射信号a(t)和反射系数ξ(t)卷积得到,即:x(t)=a(t)*ξ(t),进行傅里叶变换后得到雷达记录频谱X(ω)、入射频谱B(ω)和反射系数频谱ξ(ω)之间的关系:
X(ω)=B(ω)·ξ(ω)
第二步,用户设定预测步长α,根据自相关时窗计算出预测因子,通常预测步长α的值取为十分之一时窗大小,即假设时窗大小为20ms,则α=2。
根据上式可以得到预测因子C(ω),其中
第三步,根据上一步得到的预测因子,与原始雷达记录频谱相乘可以得到预测值,即预测到的重复反射波E(ω)。
E(ω)=C(ω)*X(ω)
第四步,原始雷达记录频谱再减去以上的重复反射波。即可得到预测纯净入射波频谱F(ω)。
F(ω)=X(ω)-E(ω)
第五步,将上一步得到的测纯净入射波频谱F(ω)利用逆傅里叶变换转化为时域振幅,即可获得去除掉重复反射波的真实雷达入射波形。
上述实施例仅为本发明的优选实施例,并非对本发明保护范围的限制,但凡采用本发明的设计原理,以及在此基础上进行非创造性劳动而作出的变化,均应属于本发明的保护范围之内。
- 基于三维探地雷达的预测卷积处理方法
- 基于三维卷积神经网络的多孔介质渗透率的预测方法