一种扫光设备
文献发布时间:2023-06-19 11:27:38
技术领域
本申请涉及扫光机领域,尤其涉及一种扫光设备。
背景技术
扫光机主要用于压电晶体、化合物半导体、硅晶体、光学玻璃、陶瓷片、视窗玻璃、金属材料、蓝宝石以及其他硬脆性材料的高精度,高效率、多功能2.5D/3D曲面扫光加工。在所加工的物料种类繁多,加工量巨大的前提下,对扫光机的运作效率及打磨精细程度则要求更高。
因此,探索一种运作效率高,打磨精细程度高的设备十分必要。
发明内容
鉴于上述问题,本申请提供了一种扫光设备,旨在解决现有设备运作效率低,打磨精细程度不高的问题。
为解决上述技术问题,本申请采用的一种技术方案是提供一种扫光设备,包括:上下料工位、多个扫光工位及主转台,该主转台包括:主转盘及通过转轴连接位于主转盘下方的主驱动组件,围绕主转盘的中心轴线圆周间隔设置的多个载物台,每个载物台下方均设有独立的子驱动组件;上下料工位及每个扫光工位分别对应一个载物台;每个扫光工位均独立设有与之匹配的位于上方的扫光盘组件;扫光盘组件包括气泵、电机、水阀及扫光盘,通过气泵及电机带动扫光盘作业;主驱动组件以及子驱动组件带动主转盘沿设定方向转动。
其中,子驱动组件包括:齿轮组,包括主动齿轮和从动齿轮;离合传动轴,连接于主动齿轮的正下方;涡轮箱,连接于离合传动轴的下方;液压挺杆,一端与离合传动轴连接,另一端与涡轮箱连接;液压挺杆用于控制离合传动轴的分开与结合。
其中,扫光工位共三个,每个扫光工位的扫光精细程度不同。
其中,三个扫光工位分别安装相同或不同的扫光介质。
其中,上下料工位的载物台的工作转速低于扫光位的载物台的工作转速。
其中,每个载物台均包含同等数量的多个载物盘。
其中,每个载物盘下均设有连接管,连接管穿过从动齿轮中心向下延伸,用于连接真空源,在扫光操作时吸附表面操作物。
其中,扫光盘的转动方向与载物台自转方向相反。
其中,扫光设备还包括智能控制系统,安装在设备外壳上,与主转台及扫光盘组件电连接,用于控制扫光设备自动按照多种预设模式作业。
本申请的有益效果是:区别于现有技术,本申请的一种扫光设备,利用驱动组件的自转与公转,以及精细化分工,高效的智能化管理,可有效提高设备的运作效率及打磨精细程度。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
图1为本申请提供的一种扫光设备的结构示意图;
图2为本申请提供的一种扫光设备的局部结构示意图;
图3为本申请提供的一种扫光设备的局部结构示意图;
图4为本申请提供的一种扫光设备的局部结构放大图。
附图标号说明:
上下料工位01、第一扫光工位02、第二扫光工位03、第三扫光工位04、主转台05、智能控制系统06、扫光盘组件20、气泵201、电机202、水阀203、扫光盘204、扫光刷205、主转盘50、主驱动组件51、载物台52、子驱动组件53、载物盘54、连接管55、齿轮组531、主动齿轮5311、从动齿轮5312、离合传动轴532、液压挺杆533、涡轮箱534。
本申请目的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请的一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
需要说明,本申请实施例中所有方向性指示诸如上、下、左、右、前、后……仅用于解释在某一特定姿态如附图所示下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
另外,在本申请中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本申请要求的保护范围之内。
本申请提供的一种技术方案是提供一种扫光设备。
请参照图1至图4,进行综合理解。
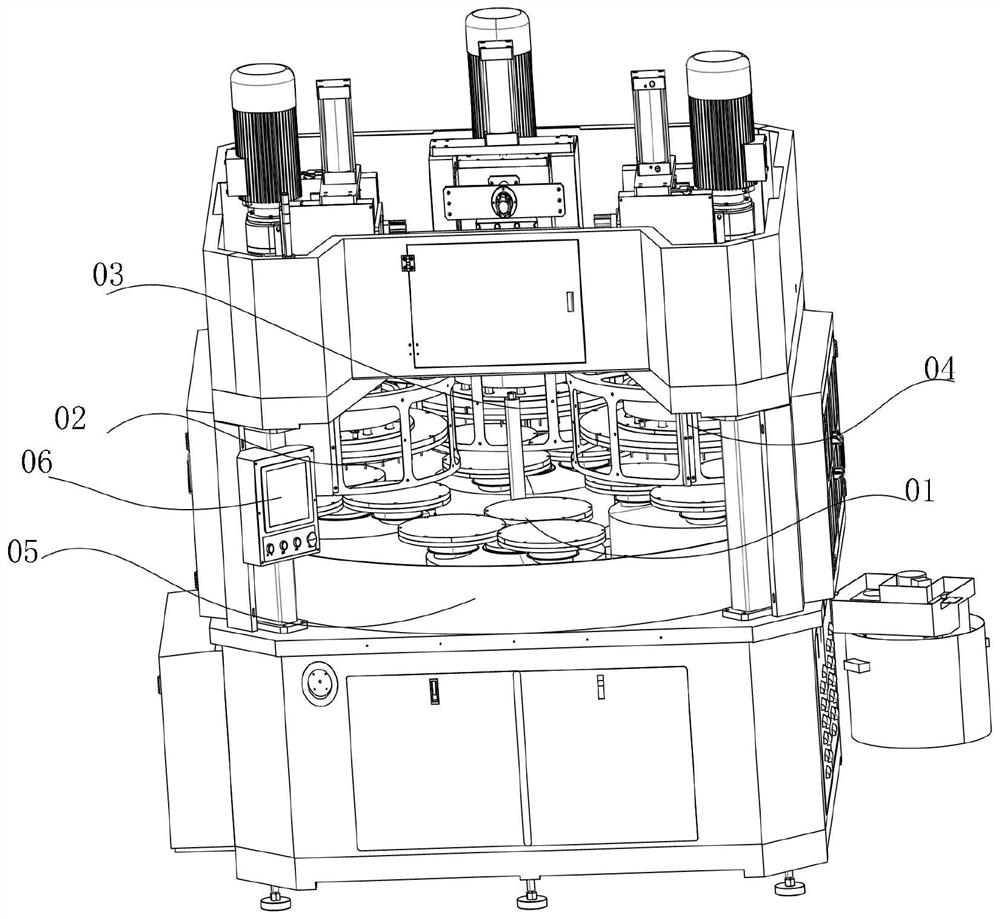
图1为本申请提供的一种扫光设备的结构示意图。
图2为本申请提供的一种扫光设备的局部结构示意图。
图3为本申请提供的一种扫光设备的局部结构示意图。
该扫光设备包括:上下料工位01、第一扫光工位02、第二扫光工位03、第三扫光工位04及主转台05。
可以理解的,本实施例仅示范性的假设为三个扫光工位,实际运用中可以根据需要采用更多或者更少扫光工位。
该主转台05包括:
主转盘50及通过转轴连接位于主转盘下方的主驱动组件51,围绕主转盘50的中心轴线圆周间隔设置的多个载物台52,每个载物台52的下方均设有独立的子驱动组件53,每个子驱动组件53能够独立控制其对应的载物台52运作。
为便于理解,本实施例仅示范性的画出四个载物台,事实上,载物台与扫光工位相对应匹配,可以据实增减。
其中,上下料工位01及每个扫光工位分别对应一个载物台52;
其中,每个扫光工位均独立设有与之匹配的位于上方的扫光盘组件20;
进一步的,扫光盘组件20包括气泵201、电机202、水阀203及扫光盘204,通过气泵201及电机202可以实现带动扫光盘作业;
扫光盘组件20通常是固定在设备外壳上,位于扫光工位的上方。
当启动设备时,主驱动组件51以及子驱动组件53带动主转盘50沿设定方向转动;
所述子驱动组件53可与所述主驱动组件51同时运作,亦可单独运作。
其中,所述子驱动组件53包括:
齿轮组531,包括主动齿轮5311和从动齿轮5312;
离合传动轴532,连接于所述主动齿轮5311的正下方;
涡轮箱534,连接于所述离合传动轴532的下方;
液压挺杆533,一端与所述离合传动轴532连接,另一端与所述涡轮箱534连接;
所述液压挺杆533用于控制所述离合传动轴532的分开与结合。
可选的,所述扫光工位共三个,每个扫光工位的扫光精细程度可以不相同,比如可以分为粗度扫光工位,中度扫光工位和精细扫光工位。
可选的,所述三个扫光工位可以分别安装不同的扫光介质,以适应不同的加工目的。
进一步的,上下料工位01的载物盘转速低于其他三个扫光工位的载物盘转速,当主转盘50转动时,每个载物盘下的液压挺杆533控制离合传动轴532分离;当载物盘转动到预定位置时,主转盘50停止,液压挺杆533控制离合传动轴532结合,扫光盘组件20开始扫光作业;当一个扫光作业周期结束后,重复上述操作继续下一个周期,三个周期完成一次完整扫光作业,载物台的自转与公转保障了每一个进入上下料工位的物料至少都经历了粗中细三次加工过程。可有效保证各工序稳步进行,并达到精细加工的目的。
其中,上下料工位01的载物台转速低于扫光位的载物台转速。
可选的,每个载物台52均包含同等数量的多个载物盘54,本实施例中每个载物台上有三个载物盘,可以理解的,每个载物台52可以分别同时置放不同的物料。
进一步的,每个载物盘54下均设有连接管55,所述连接管55穿过所述从动齿轮5312中心向下延伸,用于连接真空源,在扫光操作时用于吸附物料。采用真空吸附物料,使得物料装夹方便快速。
可以理解的,在一些具体实施例中,每个载物台52可以安置多个载物盘54,一方面可以分别置放不同品类的待处理物料,另一方面通过给每个载物盘下配置一个真空源用来提高吸附稳定性。降低吸附不平衡带来的不良影响。
其中,所述扫光盘204的转动方向与所述载物台52的自转方向相反。
请参照图4,图4为本申请提供的一种扫光设备的局部结构放大图。
所述扫光设备的扫光盘204下安装有扫光刷205,在实际运用中,可以为适应不同的待抛物选用不同种类的扫光刷205。
在一些具体实施中,该扫光设备的工作台面采用全不锈钢,更实用,方便清理表面的赃物和污水。
其中,所述扫光设备还包括智能控制系统06,安装在设备外壳上,与上述主转台05及扫光盘组件20等结构电连接,用于控制所述扫光设备自动按照多种预设模式作业。
在一些具体实施例中,该智能控制系统06能够控制设备自动清洗、自动计时、自动识别设备故障等。比如,在上下料工位摆放好全部待扫物料后,点击启动按钮,设备自动打开上下料工位的真空,待真空度达到设定值,上下料工位自动旋转90度到第一个扫光工位;第一个扫光工位的真空打开,待真空度达到设定值,第一个扫光工位功能单元开始工作,而上下料工位真空关闭,再次在上下料工位摆放好全部物料,点击启动按钮,则上下料工位真空自动打开,此时若在打开真空过程中真空度未达到设定值,设备自动停机,待检查设备故障原因,若在打开真空过程中真空度在正常范围,设备会继续运行,上下料工位等待第一个扫光工位工作完成之后进行自动旋转90度到第一个扫光工位,之前的第一个扫光工位则旋转到第二个扫光工位进行工作,以此类推,直到待扫物料经过一、二、三、三个工作的扫光后才是成品,可以取出成品,再次放入待扫物料,依次循环。
可以理解的,本申请的一种扫光设备,相对于现有技术,本申请所用设备简单灵活性更强,利用载物台的自转与公转,多方位对物料进行打磨,嵌入智能控制系统,此结构可有效保证物料周边扫光效果一致性,从而提高物料品质。且整个设备易于操作。通过上述方式,可有效提高设备的运作效率及打磨精细程度。
在本申请所提供的实施方式中,应该理解到,所揭露的方法以及结构,可以通过其它的方式实现。例如,以上所描述的结构实施方式仅仅是示意性的,实际实现时可以有另外的划分方式,例如多个单元或结构可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。
以上仅为本申请的实施例,并非因此限制本申请的专利范围,凡是在本申请的发明构思下,利用本申请说明书及附图内容所作的等效结构变换,或直接或间接运用在其他相关的技术领域均包括在本申请的专利保护范围内。
- 一种应用于扫光设备的平行轴齿轮变速箱及扫光设备
- 一种玻璃产品扫光设备和扫光方法