一种液体密度和液面位置测量装置及测量方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及传感装置技术领域,具体涉及一种液体密度和液面位置测量装置及测量方法。
背景技术
一般酒在酿造过程中液体状态不断变化,根据现有酿酒发酵趋于严格控制的目的,需要在线实时监测酒液的密度和液面位置等状态;另一方面,酿酒容器内具有酒渣,同时粘稠度变化和沉淀较多,使得任何安装在酒桶内的机械结构出现故障或误差。现有测量装置中,如邮箱内采用浮漂等结构测量液位,但酒液酿制过程中的残渣或沉淀容易堵塞或卡住测量装置,无法保证准确测量。而且现有市面上功能复杂的传感器过于昂贵,或者容易损坏,无法很好的满足类似小规模酿酒这样的需求,而且维护困难,使得酿酒设备成本大大增加。亟需一种结构简单,维护方便,能在较复杂环境下测量液体密度和液面位置的装置。
发明内容
本发明的目的是提供一种能在较复杂环境下一体测量液体密度和液面位置的测量装置,造价低,不易损坏,能够准确测量液体密度及液位状态的液体密度和液面位置测量装置及测量方法。
本发明为达到上述目的,具体通过以下技术方案得以实现的:
一种液体密度和液面位置测量装置,包括第一液压传感器、第二液压传感器、气压传感器和微处理器,第一液压传感器和第二液压传感器均设置在容器内的液面以下,且第二液压传感器的水平位置高于第一液压传感器的水平位置;气压传感器设置容器内顶部且始终位于液面以上,第一液压传感器、第二液压传感器和气压传感器分别与微处理器数据连接。
进一步的,上述方案中,第一液压传感器通过螺栓固定在容器内壁底部。
进一步的,上述方案中,气压传感器通过螺栓固定在容器内液面以上的容器内壁或顶盖上。
进一步的,上述方案中,第一液压传感器和第二液压传感器分别固定一支撑杆的两端,支撑杆竖向固定在容器内。
进一步的,上述方案中,还包括上位机和/或显示模块,微处理器通过串口(RS232/485)、网口、蓝牙、WIFI和CAN中的一种或多种常用通信方式与上位机和/或显示模块连接,将液体密度和液面位置数据输出并显示。
本发明还提供一种利用上述任一所述液体密度和液面位置测量装置实施的液体密度和液面位置测量方法,包括以下步骤:
S1、测量容器内的待测液体密度:通过微处理器读取第一液压传感器和第二液压传感器的数据,通过以下公式计算待测液体密度:
ρ=(p1–p2)/(L*g)
式中,ρ为待测液体密度,p1为第一液压传感器读取值,p2为第二液压传感器读取值,L为第一液压传感器与第二液压传感器的高度差,g为重力加速度;
S2、测量容器内液体液面相对于底部第一液压传感器的位置:通过微处理器读取液面以上的气压传感器和底部第一液压传感器的数据,通过以下公式计算待测液面相对于底部第一液压传感器的位置:
H=(p1–p0)/(ρ*g)
式中,H为待测液面相对于底部第一液压传感器的位置,ρ为已测得的液体密度,p0为气压传感器读取值,p1为第一液压传感器读取值,g为重力加速度。
进一步地,上述方案中,首次测量的步骤S1前还包括校准第一液压传感器和第二液压传感器的步骤,具体为以下步骤:
将第一液压传感器和第二液压传感器通过支撑杆或直接固定在校准容器内,向校准容器内加注纯净水至第二液压传感器水平位置,通过校准按钮启动微处理器的校准程序,校准第二液压传感器的标定值P2与气压传感器的值P0相同;将第一液压传感器的标定值P1为:
P1=L*g+P0
式中,L为第一液压传感器与第一液压传感器的水平高度差,g为重力加速度。
进一步的,上述方案中,校准容器的深度大于第一液压传感器和第二液压传感器在水平高度差。
进一步的,上述方案中,微处理器内设置按键校准程序,在首次注入纯净水后,通过校准按键启动校准程序完成校准。
进一步的,上述方案中,进行待测液体测量时,微处理器每间隔相同时间后通过接口读取传感器数据,自动计算液体的密度和液面位置。
与现有技术相比,本发明的测量装置仅使用三个压强传感器,无复杂机械移动,不易损坏,而且能够耐恶劣环境,避免复杂的酿酒容器内环境中的沉渣及粘度变化对传感器反应产生影响。利用上下两个液压传感器,与固定的上下距离,计算液体密度;利用下部的液压传感器和液面上面的气压传感器,再根据液体比重计算液面到下部传感器的距离,得到液面位置。能够满足复杂液体的密度及液位的测量,成本低,维护方便。
附图说明
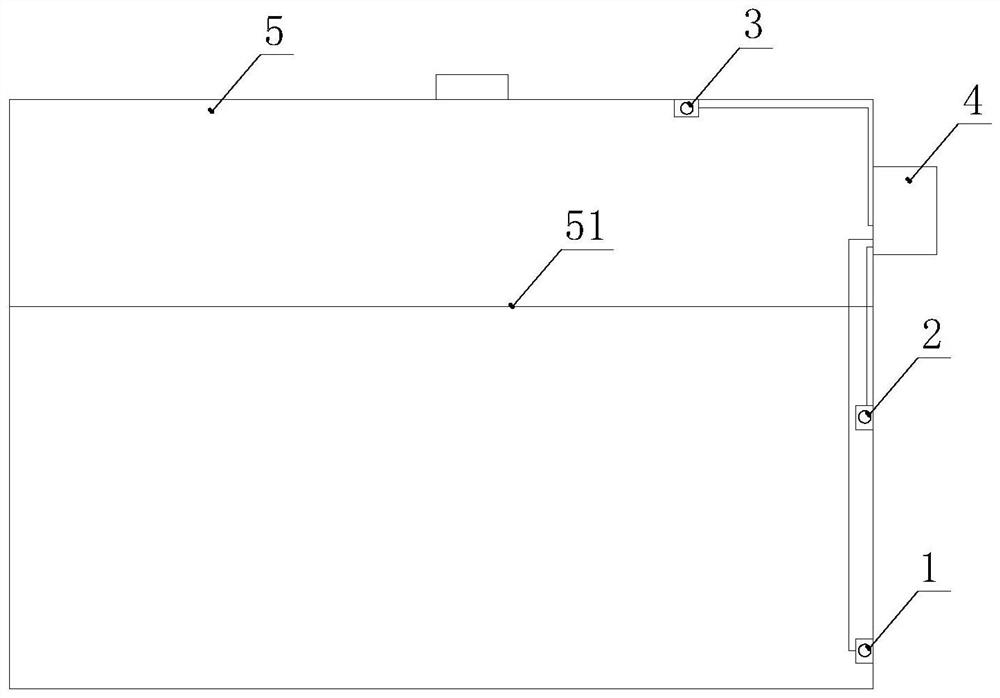
图1为本发明的整体截面结构示意图;
图2为本发明另一实施例的结构示意图。
图中,1、第一液压传感器;2、第二液压传感器;3、气压传感器;4、微处理器;5、容器;51、液面;6、支撑杆。
具体实施方式
以下结合附图及实施例对本发明作进一步详细说明。
需要说明的是,除非另有明确的规定和限定,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。
术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”、“中心”、“竖直”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
如图1所示,本发明的一种液体密度和液面位置测量装置,包括第一液压传感器1、第二液压传感器2、气压传感器3和微处理器4,第一液压传感器1和第二液压传感器2均设置在容器5内的液面51以下,且第一液压传感器1和第二液压传感器2在水平高度具有可测量的高度差;气压传感器3 设置容器5内顶部且始终位于液面51以上,且第一液压传感器1、第二液压传感器2、气压传感器3分别与微处理器4数据连接,通过微处理器6进行数据读取和处理,实现自动化控制。第一液压传感器1、第二液压传感器2 和气压传感器3可直接固定在容器5内壁,微处理器4设置在容器外,微处理器4上设置校准按键和启动开关。该测量装置连接简单,无需安装其他机械结构,无机械移动,能够避免酿酒过程中容器5内液体粘稠或沉渣造成的机械故障和失灵。
第一液压传感器1、第二液压传感器2和气压传感器3均为常规传感器,维修或更换方便,成本低;本申请的技术方案利用多个传感器的组合计算,实现实时测算液位和液体比重的效果。
第一液压传感器1、第二液压传感器2和气压传感器3的电线可穿过容器壁或支撑杆或从各传感器直接延伸至容器口的电线与微处理器4连接。
在一实施例中优选的,第一液压传感器1通过螺栓固定在容器5内壁底部;进一步的,第二液压传感器通过螺栓固定在容器内壁中部,与第一液压传感器的水平高度大于10cm,具体由传感器精度决定。第一液压传感器1 用于读取容器5下部的液压值。第二液压传感器2用于读取容器上部、液面以下某水平高度的液压值。通过实时测量具有水平高度差的两液压值,可计算液体的密度。
进一步的,上述方案中,气压传感器通过螺栓固定在容易顶部内壁或顶盖上。气压传感器3的位置始终位于容器5内液面以上,以准确测得容器内的气压值。
在另一实施例中,如图2所示,第一液压传感器1和第二液压传感器2 分别固定一支撑杆6的两端,支撑杆6竖向固定在容器5底部。支撑杆6材质可采用聚丙烯(PP)、聚乙烯(PE)、聚酯(PET)或不锈钢材质,内部中空,可用于穿线和固定底座。支撑杆6拆卸方便,成本低,同时不会引起酿酒的污染。通过支撑杆固定第一液压传感器1和第二液压传感器2,可用于较大的酿酒容器,在安装前利用小容器作为校准容器,避免大容器校准浪费纯净水。
在一实施例中优选的,该测量装置还包括上位机和/或显示模块,微处理器通过串口(RS232/485)、网口、蓝牙、WIFI和CAN中的一种或多种常用通信方式与上位机和/或显示模块连接,将液体密度和液面位置数据输出并显示。
本发明还提供一种利用上述任一技术方案的液体密度和液面位置测量装置实施的液体密度和液面位置测量方法,包括以下步骤:
S1、测量容器内的待测液体密度:通过微处理器读取第一液压传感器和第二液压传感器的数据,通过以下公式计算待测液体密度:
ρ=(p1–p2)/(L*g)
式中,ρ为待测液体密度,p1为第一液压传感器读取值,p2为第二液压传感器读取值,L为第一液压传感器与第二液压传感器的高度差,g为重力加速度;
S2、测量容器内液体液面相对于底部第一液压传感器的位置:通过微处理器读取液面以上的气压传感器和底部第一液压传感器的数据,通过以下公式计算待测液面相对于底部第一液压传感器的位置:
H=(p1–p0)/(ρ*g)
式中,H为待测液面相对于底部第一液压传感器的位置,ρ为已测得的液体密度,p0为气压传感器读取值,p1为第一液压传感器读取值,g为重力加速度。
优选的,首次测量的步骤S1前还包括校准第一液压传感器和第二液压传感器的步骤,具体为以下步骤:
将第一液压传感器和第二液压传感器通过支撑杆或直接固定在校准容器内,向校准容器内加注纯净水至第二液压传感器水平位置,通过校准按钮启动微处理器的校准程序,校准第二液压传感器的标定值P2与气压传感器的值P0相同;将第一液压传感器的标定值P1为:
P1=L*g+P0
式中,L为第一液压传感器与第一液压传感器的水平高度差,g为重力加速度。
优选的,微处理器内设置按键校准程序,在首次注入纯净水后,通过校准按键启动校准程序完成校准步骤。
优选的,进行待测液体测量时,微处理器每间隔相同时间后的通过接口读取传感器数据,自动计算液体的密度和液面位置。间隔时间可以为1秒至 1小时之间,时间可根据实际测量需求调整。
本发明通过校准和测量步骤,能够实时监测容器内液体动态的液体密度和液面位置的变化,应用在酿酒工艺中可轻松解决酿酒过程对酒液状态的严格监测,提高酿酒品质,降低设备成本。
本发明中的具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
- 一种液体密度和液面位置测量装置及测量方法
- 试样液面位置测量装置和试样液面位置测量方法