一种GNSS测量精度检测仪及使用方法
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉GNSS装置技术领域,尤其涉及一种GNSS测量精度检测仪及使用方法。
背景技术
GNSS模块可用于对GNSS当前模块的三维坐标进行定位,在GNSS设备的研发、制造或者销售过程中,经常需要对GNSS模块的定位精度进行检测或演示,现有技术通过手动移动GNSS模块,然后再通过手动测量GNSS模块移动距离,对比GNSS测量的坐标位置变化和手动测量的坐标位置变化来对GNSS模块的定位精度进行检测,现有技术存在的问题是:
1)在移动GNSS模块时,经常需要支撑物件来放置GNSS模块,使GNSS模块放置在指定的位置,但对于销售这类需要外出演示的场景来说,携带一堆支撑块非常不方便;
2)测量过程漫长且不直观,观众很难产生兴趣,对产品销售不利。
发明内容
为了解决以上现有技术的缺点和不足之处,本发明的目的是提供一种GNSS测量精度检测仪及使用方法。
本发明的技术方案是:一种GNSS测量精度检测仪,包括:
GNSS模块;
升降测量机构,所述GNSS模块连接在升降测量机构上,升降测量机构用于测量GNSS模块升降高度;
第一水平测量机构,所述GNSS模块通过第一水平测量机构连接在升降测量机构上,第一水平测量机构用于测量GNSS模块第一水平方向的位移;
第二水平测量机构,所述GNSS模块与第二水平测量机构连接,第二水平测量机构用于测量GNSS模块第二水平方向的位移,第二水平方向与第一水平方向垂直。
进一步地,所述升降测量机构包括:
底座;
第一丝杆,所述第一丝杆一端通过轴承转动连接在底座上表面,第一丝杆与底座上表面平行;
第一旋钮,所述第一旋钮为柱形,第一旋钮直径大于第一丝杆,第一旋钮与第一丝杆同轴,第一旋钮固定连接在第一丝杆上端;
竖直标尺,所述竖直标尺下端固定连接在底座上表面,竖直标尺与第一丝杆平行;
升降台,所述GNSS模块连接在升降台上,升降台为矩形,升降台其中两角分别设有第一螺孔和测量孔,第一螺孔与第一丝杆相匹配,第一丝杆螺纹连接在第一螺孔,测量孔与竖直标尺相匹配,竖直标尺滑动连接在测量孔中。
进一步地,所述升降测量机构还包括:
刻度锥,所述刻度锥固定连接在第一丝杆下部,刻度锥底面直径大于第一丝杆直径,刻度锥与第一丝杆同轴,刻度锥下表面贴在底座上表面,刻度锥靠近底座的侧表面设有第一刻度,第一刻度将刻度锥一圈均分为50份;
第一指示针,所述第一指示针固定连接在底座上表面,第一指示针针尖宽度小于第一刻度最小刻度,第一指示针针尖位于刻度锥下表面边缘;
所述第一丝杆的螺距为0.5mm。
进一步地,所述第一水平测量机构包括:
水平移动块,所述GNSS模块固定连接在水平移动块上表面,水平移动块上设有第二螺孔和第三螺孔,第二螺孔与第三螺孔相互垂直且不相交,第二螺孔的中轴线与GNSS模块的Z轴垂直,第三螺孔的中轴线与GNSS模块的Z轴垂直;
第一滑槽,所述第一滑槽包括两条,两条第一滑槽开设在升降台相对的两侧边缘,两条第一滑槽相互平行,其中一个第一滑槽侧表面设有沿第一滑槽长度方向的第一水平方向刻度;
第一滑块,所述第一滑块包括两个,第一滑块与第一滑槽相匹配,两个第一滑块分别滑动连接在两条第一滑槽内,第一滑块上开有与第一滑槽垂直的第一旋孔,第一旋孔内固定连接同轴的轴承,第一旋孔的中轴线与第二螺孔的中轴线位于同一个与第一丝杆中轴线垂直的平面上;
第二丝杆,所述第二丝杆两端通过轴承固定连接在两个第一滑块的第一旋孔内,第二丝杆与第二螺孔相匹配,第二丝杆螺纹连接在第二螺孔内;
所述第二水平测量机构包括:
第二滑槽,所述第二滑槽包括两条,两条第二滑槽开设在升降台相对的两侧边缘,第二滑槽与第一滑槽垂直,两条第二滑槽相互平行,其中一个第二滑槽侧表面设有沿第二滑槽长度方向的第二水平方向刻度;
第二滑块,所述第二滑块包括两个,第二滑块与第二滑槽相匹配,两个第二滑块分别滑动连接在两条第二滑槽内,第二滑块上开有与第二滑槽垂直的第二旋孔,第二旋孔内固定连接同轴的轴承,第二旋孔的中轴线与第三螺孔的中轴线位于同一个与第一丝杆中轴线垂直的平面上;
第三丝杆,所述第三丝杆两端通过轴承固定连接在两个第二滑块的第二旋孔内,第三丝杆与第三螺孔相匹配,第三丝杆螺纹连接在第三螺孔内。
进一步地,所述第一水平测量机构还包括:
第一刻度柱,所述第一刻度柱固定连接在第二丝杆靠近第一水平方向刻度的端部,第一刻度柱与第二丝杆同轴,第一刻度柱靠近第一滑块的侧表面设有第二刻度,第二刻度将第一刻度柱一圈均分为50份;
第二指示针,所述第二指示针固定连接在第一滑块上表面,第二指示针针尖宽度小于第二刻度最小刻度,第二指示针针尖位于靠近第一刻度柱的第一滑块边缘;
所述第二丝杆的螺距为0.5mm;
所述第二水平测量机构还包括:
第二刻度柱,所述第二刻度柱固定连接在第三丝杆靠近第二水平方向刻度的端部,第二刻度柱与第三丝杆同轴,第二刻度柱靠近第二滑块的侧表面设有第三刻度,第三刻度将第二刻度柱一圈均分为50份;
第三指示针,所述第三指示针固定连接在第二滑块上表面,第三指示针针尖宽度小于第三刻度最小刻度,第三指示针针尖位于靠近第二刻度柱的第二滑块边缘;
所述第三丝杆的螺距为0.5mm。
进一步地,还包括:
控制器;
显示器,所述显示器与控制器电连接;
第一激光测距仪,所述第一激光测距仪设置在底座上表面,第一激光测距仪发出的激光照射到升降台下表面,第一激光测距仪的激光发射方向与第一丝杆中轴线平行,第一激光测距仪与控制器电连接;
第二激光测距仪,所述第二激光测距仪设置在第一滑槽端部,第二激光测距仪的激光发射方向与第一滑槽平行,第二激光测距仪发射的激光照射到第一滑块表面,第二激光测距仪与控制器电连接;
第三激光测距仪,所述第三激光测距仪设置在第二滑槽端部,第三激光测距仪的激光发射方向与第二滑槽平行,第三激光测距仪发射的激光照射到第二滑块表面,第三激光测距仪与控制器电连接。
进一步地,还包括:
角度测量装置,所述角度测量装置设置在刻度锥与底座之间,角度测量装置设置在第一滑块与第一刻度柱之间,角度测量装置设置在第二滑块与第二刻度柱之间,角度测量装置与控制器电连接。
进一步地,所述角度测量装置包括:
第一电容测量模块,所述第一电容测量模块与控制器电连接;
第二电容测量模块,所述第二电容测量模块与控制器电连接;
第一固定电容板,所述第一固定电容板为金属材质,第一固定电容板为半圆环形,第一固定电容板与第一电容测量模块电连接;
旋转电容板,所述旋转电容板形状与第一固定电容板形状相同,旋转电容板与第一固定电容板平行,旋转电容板与第一固定电容板同轴,旋转电容板与第一电容测量模块电连接,旋转电容板与第二电容测量模块电连接;
第二固定电容板,所述第二固定电容板为1/4圆环形,第二固定电容板内径和外径与第一固定电容板相同,第二固定电容板与旋转电容板平行,第二固定电容板与旋转电容板同轴,参考平面与第一固定电容板平行,第一固定电容板与第二固定电容板在参考平面上的投影为一个完整圆环形,第二固定电容板与旋转电容板的间距不等于第一固定电容板与旋转电容板的间距,第二固定电容板与第二电容测量模块电连接。
一种所述的GNSS测量精度检测仪的使用方法,所述方法包括:
高度变化值ΔH测量:第一激光测距仪测量升降台的初始位置并发送给控制器,控制器取毫米以上的高度初始头值A0,角度测量装置测量刻度锥的角度θ0并发送给控制器,控制器计算出高度初始尾值
第一水平方向变化值ΔX测量:第二激光测距仪测量第一滑块的初始位置并发送给控制器,控制器取毫米以上的第一水平方向初始头值C0,角度测量装置测量第一刻度柱的角度
第二水平方向变化值ΔY测量:第三激光测距仪测量第二滑块的初始位置并发送给控制器,控制器取毫米以上的第二水平方向初始头值E0,角度测量装置测量第一刻度柱的角度ψ0并发送给控制器,控制器计算出第二水平方向初始尾值
进一步地,所述角度测量装置的角度测量方法为:
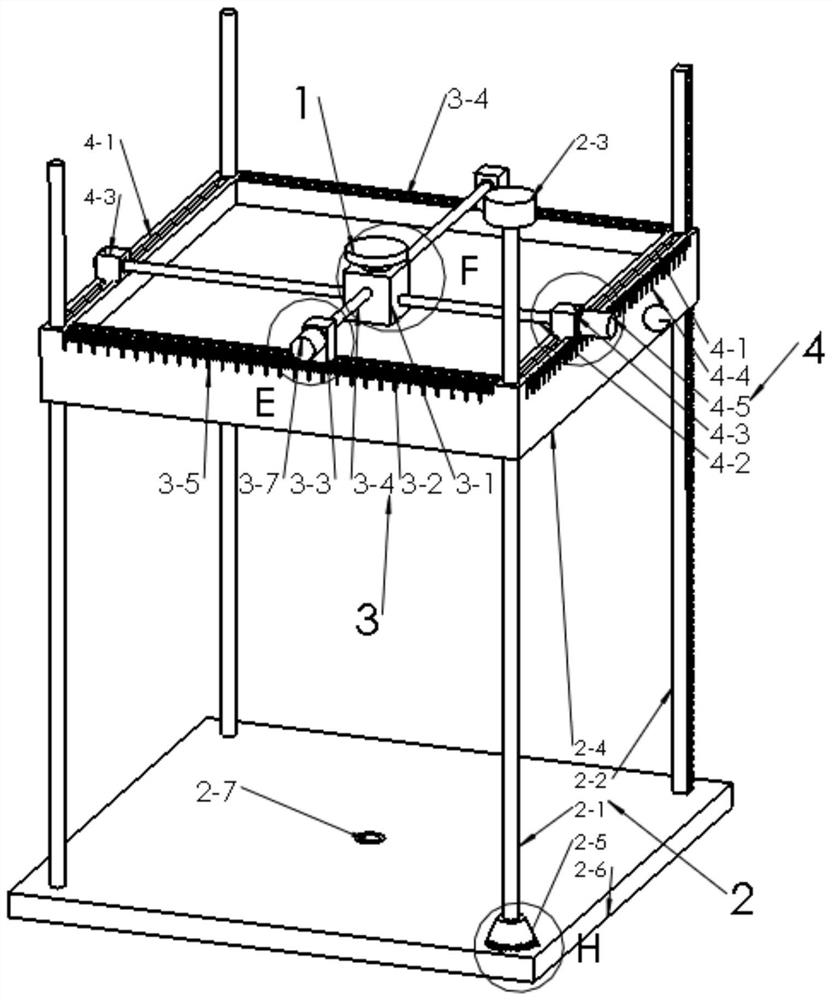
第一电容测量模块读取第一固定电容板与旋转电容板之间的电容值C1并发送给控制器,计算旋转电容板的弦第一固定电容板的弦之间的夹角ω,ω=180*(C1/C1max),C1max为第一固定电容板与旋转电容板之间的最大电容值,C2max为第二固定电容板与旋转电容板之间的最大电容值,旋转电容板旋转角度β指旋转电容板以第一固定电容板的弦为起点绕自身转轴转动的角度,第二电容测量模块读取第二固定电容板与旋转电容板之间的电容值C2并发送给控制器,控制器判断如果C2=0且C1=C1max则旋转电容板旋转角度β=ω,控制器判断如果C2>0且C1≥C1max/2则旋转电容板旋转角度β=ω,控制器判断如果C2=C2max且C1 本发明的有益效果是:与现有技术相比, 1)本发明通过升降测量机构改变和测量GNSS模块高度,通过第一水平测量机构改变和测量GNSS模块在第一水平方向的位置,通过第二水平测量机构改变和测量GNSS模块在第二水平方向的位置,从而使得GNSS模块的位置改变无需支撑块,而是整合到一个整体结构中,使得本装置更便携,同时GNSS模块位置的改变被分解为3个维度,分别对应于GNSS模块测量的3个维度,每个维度的测量误差都能够被直观的显示出来,最后由于位置的改变和测量同步,使得演示过程时间更短; 2)本发明通过第一丝杆和竖直标尺限定升降台在水平面的位置,通过第一丝杆在第一螺孔内转动使升降台在竖直方向位置改变,通过竖直标尺测量升降台位置,从而实现GNSS模块在竖直方向的位置调整和测量; 3)本发明通过将第一丝杆螺距设为0.5mm,并且在第一丝杆上设置刻度锥,并在底座上表面设置第一指示针指示,使得第一丝杆与升降台间的相对运动被放大,通过与竖直标尺结合,从而将升降台与第一丝杆的相对位置变化测量结果精确到0.01mm,使得本装置能够演示出在竖直方向位置变化为0.01mm的精度下GNSS的测量误差; 4)本发明通过第二丝杆在第二螺孔内转动改变GNSS模块在第一水平方向的位置变化,通过第三丝杆转动在第三螺孔内转动改变GNSS模块在第二水平方向的位置变化,第二螺杆和第三螺杆间相互配合使得水平移动块上的GNSS模块的Z轴不会发生倾斜,然后通过第一水平方向刻度和第二水平方向刻度变化得到第一滑块和第二滑块位置变化; 5)本发明通过将第二丝杆螺距设为0.5mm,并且在第二丝杆上设置第一刻度柱,并在第一滑块上表面设置第二指示针指示,使得第二丝杆与第一活动块间的相对运动被放大,通过与第一水平方向刻度结合,从而将第一活动块与第二丝杆的相对位置变化测量结果精确到0.01mm,使得本装置能够演示出在第一水平方向位置变化为0.01mm的精度下GNSS的测量误差;通过将第三丝杆螺距设为0.5mm,并且在第三丝杆上设置第二刻度柱,并在第二滑块上表面设置第三指示针指示,使得第三丝杆与第二活动块间的相对运动被放大,通过与第二水平方向刻度结合,从而将第二活动块与第三丝杆的相对位置变化测量结果精确到0.01mm,使得本装置能够演示出在第二水平方向位置变化为0.01mm的精度下GNSS的测量误差; 6)本发明通过第一激光测距仪测量出毫米精度的升降台距离值,通过第二激光测距仪测量出毫米精度的第一滑块距离值,通过第三激光测距仪测量出毫米精度的第三滑块距离值,并通过显示器显示,从而使得GNSS模块在第一水平方向和第二水平方向的位置变化可以快捷直观的显示,测量速度更快,显示更加直观; 7)由于激光测距仪测量精度只能达到1mm,因此测量精度不够,本发明先通过刻度锥将升降台上下运动的距离转变为刻度锥相对第一指示针的角度变化,第一刻度柱将第一活动块在第一水平方向的运动距离转变为第一刻度柱相对第二指示针的角度变化,第二刻度柱将第二活动块在第一水平方向的运动距离转变为第二刻度柱相对第三指示针的角度变化,通过角度测量装置测量的角度变化、第一激光测距仪、第二激光测距仪和第三激光测距仪的测量值,计算出升降台在竖直方向的位置变化,算出第一活动块在第一水平方向的位置变化,算出第二活动块在第二水平方向的位置变化,测量精度更高,测量速度更快; 8)本发明通过旋转电容板与第一固定电容板间的电容值变化得到旋转电容板的弦相对第一固定电容板的弦间的夹角,然后结合旋转电容板与第二固定电容板间的电容值,判断旋转电容板旋转角度β,从而控制器根据β结合第一激光测距仪、第二激光测距仪和第三激光测距仪的测量值,算出升降台在竖直方向的位置变化,第一活动块在第一水平方向的位置变化,第二活动块在第二水平方向的位置变化,测量精度更高,测量速度更快; 9)本发明通过第一激光测距仪测量将升降台高度的起点和终点值得到头值,通过角度测量装置将刻度锥起点和终点的角度得出尾值,头值和尾值结合从而得到精确的升降台高度变化;通过第二激光测距仪测量将第一活动块在第一水平方向的起点和终点值得到头值,通过角度测量装置将刻度锥起点和终点的角度得出尾值,头值和尾值结合从而得到精确的第一活动块在第一水平方向的距离变化;通过第三激光测距仪测量将第二活动块在第二水平方向的起点和终点值得到头值,通过角度测量装置将刻度锥起点和终点的角度得出尾值,头值和尾值结合从而得到精确的第二活动块在第二水平方向的距离变化;相对于现有技术仅通过单一的激光测距仪测量距离变化,更加精确; 10)本发明先通过旋转电容板与第一固定电容板间的电容值变化得到旋转电容板的弦相对第一固定电容板的弦间的夹角,然后结合旋转电容板与第二固定电容板间的电容值,判断旋转电容板旋转角度β,从而控制器根据β结合第一激光测距仪、第二激光测距仪和第三激光测距仪的测量值,算出升降台在竖直方向的位置变化,算出第一活动块在第一水平方向的位置变化,算出第二活动块在第二水平方向的位置变化,相对于现有技术仅通过两块电容板间的电容值测量角度,现有技术测量的角度范围为0~180°,而本发明测量出的角度范围为0°~360°,能够实现旋转电容板以第一固定电容板的弦为起点绕自身转轴转动的角度的测量,测量范围更宽。 附图说明 图1为本发明实施实例1的立体结构示意图; 图2为图1中F处的局部视图; 图3为图1中G处的局部视图; 图4为图1中E处的局部视图; 图5为图1中H处的局部视图; 图6为本发明实施实例1的爆炸视图; 图7为图6中J处的局部视图; 图8为图6中K处的局部视图; 图9为图6中L处的局部视图; 图10为本发明实施实例1的另一个视角的立体结构示意图; 图11为图10中I处的局部视图; 图12为本发明实施实例1的第一刻度柱处的结构示意图; 图13为图12中Q-Q剖面线处的剖视图; 图14为图12中R-R剖面线处的剖视图; 图15为图12中T-T剖面线处的剖视图; 图16为本发明实施实例1的电路结构框图。 具体实施方式 下面结合附图及具体的实施例对发明进行进一步介绍: 实施例1:参考图1至图16,本发明的技术方案是:一种GNSS测量精度检测仪,包括:GNSS模块1,GNSS模块1可以是GNSS板卡;升降测量机构2,这里的升降测量机构2可以是带刻度的伸缩杆,所述GNSS模块1连接在升降测量机构2上,升降测量机构2用于测量GNSS模块1升降高度;第一水平测量机构3,第一水平测量机构3可以是带刻度的滑槽,所述GNSS模块1通过第一水平测量机构3连接在升降测量机构2上,第一水平测量机构3用于测量GNSS模块1第一水平方向的位移;第二水平测量机构4,所述GNSS模块1与第二水平测量机构4连接,第二水平测量机构4可以是带刻度的滑槽,第二水平测量机构4用于测量GNSS模块1第二水平方向的位移,第二水平方向与第一水平方向垂直。 进一步地,所述升降测量机构2包括:底座2-6;第一丝杆2-1,所述第一丝杆2-1一端通过轴承转动连接在底座2-6上表面,第一丝杆2-1与底座2-6上表面平行;第一旋钮2-3,所述第一旋钮2-3为柱形,第一旋钮2-3直径大于第一丝杆2-1,第一旋钮2-3与第一丝杆2-1同轴,第一旋钮2-3固定连接在第一丝杆2-1上端;竖直标尺2-2,所述竖直标尺2-2下端焊接连接在底座2-6上表面,竖直标尺2-2与第一丝杆2-1平行;升降台2-4,所述GNSS模块1连接在升降台2-4上,升降台2-4为矩形,升降台2-4其中两角分别设有第一螺孔2-4-1和测量孔2-4-2,第一螺孔2-4-1与第一丝杆2-1相匹配,第一丝杆2-1螺纹连接在第一螺孔2-4-1,测量孔2-4-2与竖直标尺2-2相匹配,竖直标尺2-2滑动连接在测量孔2-4-2中。为了使升降台2-4上下运动更加稳定,可以在底座2-6另外两角再焊接连接两根于第一丝杆2-1平行的滑杆,升降台2-4对应位置开设两哥上下贯通的滑孔,滑孔与滑杆相匹配,滑杆滑动连接在滑孔内。 进一步地,所述升降测量机构2还包括:刻度锥2-5,所述刻度锥2-5固定连接在第一丝杆2-1下部,刻度锥2-5底面直径大于第一丝杆2-1直径,刻度锥2-5与第一丝杆2-1同轴,刻度锥2-5下表面贴在底座2-6上表面,刻度锥2-5靠近底座2-6的侧表面设有第一刻度2-5-1,第一刻度2-5-1将刻度锥2-5一圈均分为50份;第一指示针2-7,所述第一指示针2-7固定连接在底座2-6上表面,第一指示针2-7针尖宽度小于第一刻度2-5-1最小刻度,第一指示针2-7针尖位于刻度锥2-5下表面边缘;所述第一丝杆2-1的螺距为0.5mm。 进一步地,所述第一水平测量机构3包括:水平移动块3-1,所述GNSS模块1固定连接在水平移动块3-1上表面,水平移动块3-1上设有第二螺孔3-1-1和第三螺孔3-1-2,第二螺孔3-1-1与第三螺孔3-1-2相互垂直且不相交,第二螺孔3-1-1的中轴线与GNSS模块1的Z轴垂直,第三螺孔3-1-2的中轴线与GNSS模块1的Z轴垂直;第一滑槽3-2,所述第一滑槽3-2包括两条,两条第一滑槽3-2开设在升降台2-4相对的两侧边缘,两条第一滑槽3-2相互平行,其中一个第一滑槽3-2侧表面设有沿第一滑槽3-2长度方向的第一水平方向刻度3-5;第一滑块3-3,所述第一滑块3-3包括两个,第一滑块3-3与第一滑槽3-2相匹配,两个第一滑块3-3分别滑动连接在两条第一滑槽3-2内,第一滑块3-3上开有与第一滑槽3-2垂直的第一旋孔3-3-1,第一旋孔3-3-1内固定连接同轴的轴承,第一旋孔3-3-1的中轴线与第二螺孔3-1-1的中轴线位于同一个与第一丝杆2-1中轴线垂直的平面上;第二丝杆3-4,所述第二丝杆3-4两端通过轴承固定连接在两个第一滑块3-3的第一旋孔3-3-1内,第二丝杆3-4与第二螺孔3-1-1相匹配,第二丝杆3-4螺纹连接在第二螺孔3-1-1内;所述第二水平测量机构4包括:第二滑槽4-1,所述第二滑槽4-1包括两条,两条第二滑槽4-1开设在升降台2-4相对的两侧边缘,第二滑槽4-1与第一滑槽3-2垂直,两条第二滑槽4-1相互平行,其中一个第二滑槽4-1侧表面设有沿第二滑槽4-1长度方向的第二水平方向刻度4-4;第二滑块4-3,所述第二滑块4-3包括两个,第二滑块4-3与第二滑槽4-1相匹配,两个第二滑块4-3分别滑动连接在两条第二滑槽4-1内,第二滑块4-3上开有与第二滑槽4-1垂直的第二旋孔4-3-1,第二旋孔4-3-1内固定连接同轴的轴承,第二旋孔4-3-1的中轴线与第三螺孔3-1-2的中轴线位于同一个与第一丝杆2-1中轴线垂直的平面上;第三丝杆4-2,所述第三丝杆4-2两端通过轴承固定连接在两个第二滑块4-3的第二旋孔4-3-1内,第三丝杆4-2与第三螺孔3-1-2相匹配,第三丝杆4-2螺纹连接在第三螺孔3-1-2内。 进一步地,所述第一水平测量机构3还包括:第一刻度柱2-5,所述第一刻度柱2-5固定连接在第二丝杆3-4靠近第一水平方向刻度3-5的端部,第一刻度柱2-5与第二丝杆3-4同轴,第一刻度柱2-5靠近第一滑块3-3的侧表面设有第二刻度3-7-1,第二刻度3-7-1将第一刻度柱2-5一圈均分为50份;第二指示针3-6,所述第二指示针3-6固定连接在第一滑块3-3上表面,第二指示针3-6针尖宽度小于第二刻度3-7-1最小刻度,第二指示针3-6针尖位于靠近第一刻度柱2-5的第一滑块3-3边缘;所述第二丝杆3-4的螺距为0.5mm;所述第二水平测量机构4还包括:第二刻度柱3-7,所述第二刻度柱3-7固定连接在第三丝杆4-2靠近第二水平方向刻度4-4的端部,第二刻度柱3-7与第三丝杆4-2同轴,第二刻度柱3-7靠近第二滑块4-3的侧表面设有第三刻度4-5-1,第三刻度4-5-1将第二刻度柱3-7一圈均分为50份;第三指示针4-6,所述第三指示针4-6固定连接在第二滑块4-3上表面,第三指示针4-6针尖宽度小于第三刻度4-5-1最小刻度,第三指示针4-6针尖位于靠近第二刻度柱3-7的第二滑块4-3边缘;所述第三丝杆4-2的螺距为0.5mm。 进一步地,还包括:控制器6,控制器6可以是PLC、Arduino或树莓派等带外围电路的控制组件;显示器7,所述显示器7与控制器6电连接;第一激光测距仪2-7,所述第一激光测距仪2-7设置在底座2-6上表面,第一激光测距仪2-7发出的激光照射到升降台2-4下表面,第一激光测距仪2-7的激光发射方向与第一丝杆2-1中轴线平行,第一激光测距仪2-7与控制器6电连接;第二激光测距仪3-8,所述第二激光测距仪3-8设置在第一滑槽3-2端部,第二激光测距仪3-8的激光发射方向与第一滑槽3-2平行,第二激光测距仪3-8发射的激光照射到第一滑块3-3表面,第二激光测距仪3-8与控制器6电连接;第三激光测距仪4-7,所述第三激光测距仪4-7设置在第二滑槽4-1端部,第三激光测距仪4-7的激光发射方向与第二滑槽4-1平行,第三激光测距仪4-7发射的激光照射到第二滑块4-3表面,第三激光测距仪4-7与控制器6电连接。这里的第一激光测距仪2-7、第二激光测距仪3-8和第三激光测距仪4-7可采用品牌为MyAntenna,型号为L的激光测距模块。 进一步地,还包括:角度测量装置,所述角度测量装置设置在刻度锥2-5与底座2-6之间,角度测量装置设置在第一滑块3-3与第一刻度柱2-5之间,角度测量装置设置在第二滑块4-3与第二刻度柱3-7之间,角度测量装置与控制器6电连接。 进一步地,所述角度测量装置包括:第一电容测量模块5-5,所述第一电容测量模块5-5与控制器6电连接;第二电容测量模块5-4,所述第二电容测量模块5-4与控制器6电连接;第一固定电容板5-1,所述第一固定电容板5-1为金属材质,第一固定电容板5-1为半圆环形,第一固定电容板5-1与第一电容测量模块5-5电连接;旋转电容板5-3,所述旋转电容板5-3形状与第一固定电容板5-1形状相同,旋转电容板5-3与第一固定电容板5-1平行,旋转电容板5-3与第一固定电容板5-1同轴,旋转电容板5-3与第一电容测量模块5-5电连接,旋转电容板5-3与第二电容测量模块5-4电连接;第二固定电容板5-2,所述第二固定电容板5-2为1/4圆环形,第二固定电容板5-2内径和外径与第一固定电容板5-1相同,第二固定电容板5-2与旋转电容板5-3平行,第二固定电容板5-2与旋转电容板5-3同轴,参考平面与第一固定电容板5-1平行,第一固定电容板5-1与第二固定电容板5-2在参考平面上的投影为一个完整圆环形,第二固定电容板5-2与旋转电容板5-3的间距不等于第一固定电容板5-1与旋转电容板5-3的间距,第二固定电容板5-2与第二电容测量模块5-4电连接。安装在刻度锥2-5与底座2-6之间的角度测量装置,第一固定电容板5-1设置在底座2-6内,第一固定电容板5-1与第一丝杆2-1垂直,第一固定电容板5-1内径大于第一丝杆2-1外径,第一固定电容板5-1外直径小于刻度锥2-5下底面直径,第二固定电容板5-2设置在底座2-6内,第二固定电容板5-2与第一丝杆2-1垂直,旋转电容板5-3设置在刻度锥2-5内。安装在第一刻度柱2-5与第一滑块3-3之间的角度测量装置,第一固定电容板5-1设置在第一滑块3-3内,第一固定电容板5-1与第二丝杆3-4垂直,第一固定电容板5-1内径大于第一旋孔3-3-1,第一固定电容板5-1外直径小于第一刻度柱2-5直径,第二固定电容板5-2设置在第一活动块内,第二固定电容板5-2与第二丝杆3-4垂直,旋转电容板5-3设置在第一刻度柱2-5内。安装在第二刻度柱3-7与第二滑块4-3之间的角度测量装置,第一固定电容板5-1设置在第二滑块4-3内,第一固定电容板5-1与第三丝杆4-2垂直,第一固定电容板5-1内径大于第二旋孔4-3-1,第一固定电容板5-1外直径小于第二刻度柱3-7直径,第二固定电容板5-2设置在第二活动块内,第二固定电容板5-2与第三丝杆4-2垂直,旋转电容板5-3设置在第二刻度柱3-7内。 一种所述的GNSS测量精度检测仪的使用方法,所述方法包括: 高度变化值ΔH测量:第一激光测距仪2-7测量升降台2-4的初始位置并发送给控制器6,控制器6取毫米以上的高度初始头值A0,角度测量装置测量刻度锥2-5的角度θ0并发送给控制器6,控制器6计算出高度初始尾值 第一水平方向变化值ΔX测量:第二激光测距仪3-8测量第一滑块3-3的初始位置并发送给控制器6,控制器6取毫米以上的第一水平方向初始头值C0,角度测量装置测量第一刻度柱2-5的角度 第二水平方向变化值ΔY测量:第三激光测距仪4-7测量第二滑块4-3的初始位置并发送给控制器6,控制器6取毫米以上的第二水平方向初始头值E0,角度测量装置测量第一刻度柱2-5的角度ψ0并发送给控制器6,控制器6计算出第二水平方向初始尾值 进一步地,所述角度测量装置的角度测量方法为:第一电容测量模块5-5读取第一固定电容板5-1与旋转电容板5-3之间的电容值C1并发送给控制器6,计算旋转电容板5-3的弦第一固定电容板5-1的弦之间的夹角ω,ω=180*(C1/C1max),C1max为第一固定电容板5-1与旋转电容板5-3之间的最大电容值,C2max为第二固定电容板5-2与旋转电容板5-3之间的最大电容值,旋转电容板5-3旋转角度β指旋转电容板5-3以第一固定电容板5-1的弦为起点绕自身转轴转动的角度,第二电容测量模块5-4读取第二固定电容板5-2与旋转电容板5-3之间的电容值C2并发送给控制器6,控制器6判断如果C2=0且C1=C1max则旋转电容板5-3旋转角度β=ω,控制器6判断如果C2>0且C1≥C1max/2则旋转电容板5-3旋转角度β=ω,控制器6判断如果C2=C2max且C1 本发明的优点是, 1)本发明通过升降测量机构2改变和测量GNSS模块1高度,通过第一水平测量机构3改变和测量GNSS模块1在第一水平方向的位置,通过第二水平测量机构4改变和测量GNSS模块1在第二水平方向的位置,从而使得GNSS模块1的位置改变无需支撑块,而是整合到一个整体结构中,使得本装置更便携,同时GNSS模块1位置的改变被分解为3个维度,分别对应于GNSS模块1测量的3个维度,每个维度的测量误差都能够被直观的显示出来,最后由于位置的改变和测量同步,使得演示过程时间更短; 2)本发明通过第一丝杆2-1和竖直标尺2-2限定升降台2-4在水平面的位置,通过第一丝杆2-1在第一螺孔2-4-1内转动使升降台2-4在竖直方向位置改变,通过竖直标尺2-2测量升降台2-4位置,从而实现GNSS模块1在竖直方向的位置调整和测量; 3)本发明通过将第一丝杆2-1螺距设为0.5mm,并且在第一丝杆2-1上设置刻度锥2-5,并在底座2-6上表面设置第一指示针2-7指示,使得第一丝杆2-1与升降台2-4间的相对运动被放大,通过与竖直标尺2-2结合,从而将升降台2-4与第一丝杆2-1的相对位置变化测量结果精确到0.01mm,使得本装置能够演示出在竖直方向位置变化为0.01mm的精度下GNSS的测量误差; 4)本发明通过第二丝杆3-4在第二螺孔3-1-1内转动改变GNSS模块1在第一水平方向的位置变化,通过第三丝杆4-2转动在第三螺孔3-1-2内转动改变GNSS模块1在第二水平方向的位置变化,第二螺杆和第三螺杆间相互配合使得水平移动块3-1上的GNSS模块1的Z轴不会发生倾斜,然后通过第一水平方向刻度3-5和第二水平方向刻度4-4变化得到第一滑块3-3和第二滑块4-3位置变化; 5)本发明通过将第二丝杆3-4螺距设为0.5mm,并且在第二丝杆3-4上设置第一刻度柱2-5,并在第一滑块3-3上表面设置第二指示针3-6指示,使得第二丝杆3-4与第一活动块间的相对运动被放大,通过与第一水平方向刻度3-5结合,从而将第一活动块与第二丝杆3-4的相对位置变化测量结果精确到0.01mm,使得本装置能够演示出在第一水平方向位置变化为0.01mm的精度下GNSS的测量误差;通过将第三丝杆4-2螺距设为0.5mm,并且在第三丝杆4-2上设置第二刻度柱3-7,并在第二滑块4-3上表面设置第三指示针4-6指示,使得第三丝杆4-2与第二活动块间的相对运动被放大,通过与第二水平方向刻度4-4结合,从而将第二活动块与第三丝杆4-2的相对位置变化测量结果精确到0.01mm,使得本装置能够演示出在第二水平方向位置变化为0.01mm的精度下GNSS的测量误差; 6)本发明通过第一激光测距仪2-7测量出毫米精度的升降台2-4距离值,通过第二激光测距仪3-8测量出毫米精度的第一滑块3-3距离值,通过第三激光测距仪4-7测量出毫米精度的第三滑块距离值,并通过显示器7显示,从而使得GNSS模块1在第一水平方向和第二水平方向的位置变化可以快捷直观的显示,测量速度更快,显示更加直观; 7)由于激光测距仪测量精度只能达到1mm,因此测量精度不够,本发明先通过刻度锥2-5将升降台2-4上下运动的距离转变为刻度锥2-5相对第一指示针2-7的角度变化,第一刻度柱2-5将第一活动块在第一水平方向的运动距离转变为第一刻度柱2-5相对第二指示针3-6的角度变化,第二刻度柱3-7将第二活动块在第一水平方向的运动距离转变为第二刻度柱3-7相对第三指示针4-6的角度变化,通过角度测量装置测量的角度变化、第一激光测距仪2-7、第二激光测距仪3-8和第三激光测距仪4-7的测量值,计算出升降台2-4在竖直方向的位置变化,算出第一活动块在第一水平方向的位置变化,算出第二活动块在第二水平方向的位置变化,测量精度更高,测量速度更快; 8)本发明通过旋转电容板5-3与第一固定电容板5-1间的电容值变化得到旋转电容板5-3的弦相对第一固定电容板5-1的弦间的夹角,然后结合旋转电容板5-3与第二固定电容板5-2间的电容值,判断旋转电容板5-3旋转角度β,从而控制器6根据β结合第一激光测距仪2-7、第二激光测距仪3-8和第三激光测距仪4-7的测量值,算出升降台2-4在竖直方向的位置变化,第一活动块在第一水平方向的位置变化,第二活动块在第二水平方向的位置变化,测量精度更高,测量速度更快; 9)本发明通过第一激光测距仪2-7测量将升降台2-4高度的起点和终点值得到头值,通过角度测量装置将刻度锥2-5起点和终点的角度得出尾值,头值和尾值结合从而得到精确的升降台2-4高度变化;通过第二激光测距仪3-8测量将第一活动块在第一水平方向的起点和终点值得到头值,通过角度测量装置将刻度锥2-5起点和终点的角度得出尾值,头值和尾值结合从而得到精确的第一活动块在第一水平方向的距离变化;通过第三激光测距仪4-7测量将第二活动块在第二水平方向的起点和终点值得到头值,通过角度测量装置将刻度锥2-5起点和终点的角度得出尾值,头值和尾值结合从而得到精确的第二活动块在第二水平方向的距离变化;相对于现有技术仅通过单一的激光测距仪测量距离变化,更加精确; 10)本发明先通过旋转电容板5-3与第一固定电容板5-1间的电容值变化得到旋转电容板5-3的弦相对第一固定电容板5-1的弦间的夹角,然后结合旋转电容板5-3与第二固定电容板5-2间的电容值,判断旋转电容板5-3旋转角度β,从而控制器6根据β结合第一激光测距仪2-7、第二激光测距仪3-8和第三激光测距仪4-7的测量值,算出升降台2-4在竖直方向的位置变化,算出第一活动块在第一水平方向的位置变化,算出第二活动块在第二水平方向的位置变化,相对于现有技术仅通过两块电容板间的电容值测量角度,现有技术测量的角度范围为0~180°,而本发明测量出的角度范围为0°~360°,能够实现旋转电容板5-3以第一固定电容板5-1的弦为起点绕自身转轴转动的角度的测量,测量范围更宽。 以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
- 一种GNSS测量精度检测仪及使用方法
- 一种GNSS测量精度检测仪的升降测量机构