一种基于多无人机的目标位姿实时测量方法及系统
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及无人机视觉测量技术领域,尤其涉及一种基于多无人机的目标位姿实时测量方法及系统。
背景技术
在无法利用地面参照物的情况下,高空目标的姿态测量一直没有行之有效的、经济简易的方法。较为常用的方法是在目标上安装传感器,但是高精度传感器存在价格昂贵的问题,而且这类方法在目标不能安装传感器的情况下无法使用。另一类方法是摄影测量方法,这类方法需要事先固定相机,并对相机进行标定,然后实施测量。这种方式可以不需要对目标进行额外安装传感器的操作,但是对于高空目标,相机由于硬件限制,无法进行清晰拍摄,使用场景受到限制。还有一类方法是利用无人机进行摄像测量的方法,这类方法通常需要地面有参照物,对于高空测量的场景,或者地面参照物不明显的时候,特别是对海面高空目标,无法使用进行测量。
发明内容
为了解决上述技术问题,本发明的目的是提供一种基于多无人机的目标位姿实时测量方法及系统,高精度的实现对空中目标的实时位姿测量。
本发明所采用的第一技术方案是:一种基于多无人机的目标位姿实时测量方法,包括以下步骤:
控制三台无人机将待测目标包围;
对三台无人机上的相机进行实时标定,得到标定后的测量相机;
基于双目交会测量原理和标定后的测量相机对待测目标进行位姿测量;
所述三台无人机上均设有LED标志灯,所述三台无人机处于同一水平面上,所述待测目标处于三台无人机围成的三角形的中心位置。
进一步,所述对三台无人机上的相机进行实时标定,得到标定后的测量相机这一步骤,其具体包括:
基于中心投射成像关系,得到相机坐标系方程;
获取无人机的实时数据并对相机坐标系方程进行求解,得到实时旋转矩阵;
基于实时旋转矩阵完成相机标定,得到标定后的测量相机。
进一步,所述相机坐标系方程具体如下式:
上式中,无人机在世界坐标系中的实时位置(X,Y,Z)由无人机的卫星定位系统GPS实时信息转换得到,(F
进一步,实时旋转矩阵R的表达式如下:
上式中,α、β、γ分别表示绕x、y、z轴转动的欧拉角。
进一步,所述基于双目交会测量原理和标定后的测量相机对待测目标进行位姿测量这一步骤,其具体包括:
对于t
对于t
根据端点t
进一步,对于端点A
上式中,
进一步,所述基于双目交会测量原理和标定后的测量相机对待测目标进行位姿测量这一步骤还包括解算目标姿态角,具体包括:
对于t
对于t
根据端点t
进一步,计算端点t
上式中,(X
进一步,计算端点t
本发明所采用的第二技术方案是:一种基于多无人机的目标位姿实时测量系统,包括:
无人机控制模块,用于控制三台无人机将待测目标包围;
标定模块,用于对三台无人机上的相机进行实时标定,得到标定后的测量相机;
测量模块,用于基于双目交会测量原理和标定后的测量相机对待测目标进行位姿测量。
本发明方法及系统的有益效果是:本发明通过多无人机平台搭载的相机相互间的通视拍摄,实时测算多个平台的相对位姿关系,实时建立无人机坐标系,进而高精度的实现对空中目标的实时位姿测量。
附图说明
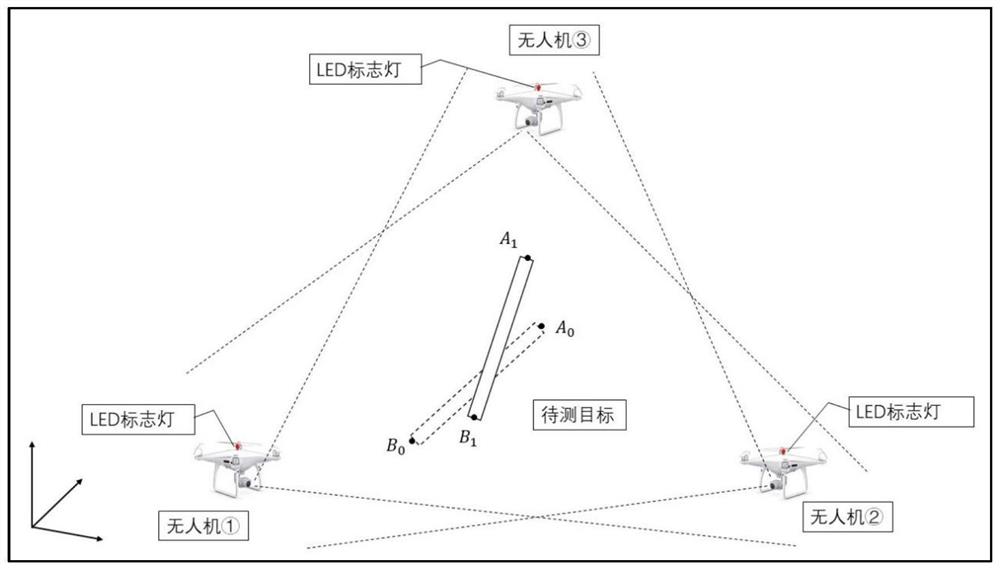
图1是本发明具体实施例无人机飞行拍摄示意图;
图2是本发明一种基于多无人机的目标位姿实时测量方法的步骤流程图;
图3是本发明具体实施例目标位姿解算示意图;
图4是本发明具体实施例目标姿态角解算示意图;
图5是本发明一种基于多无人机的目标位姿实时测量系统的结构框图。
具体实施方式
下面结合附图和具体实施例对本发明做进一步的详细说明。对于以下实施例中的步骤编号,其仅为了便于阐述说明而设置,对步骤之间的顺序不做任何限定,实施例中的各步骤的执行顺序均可根据本领域技术人员的理解来进行适应性调整。
参照图2,本发明提供了一种基于多无人机的目标位姿实时测量方法,该方法包括以下步骤:
S1、控制三台无人机将待测目标包围;
具体地,控制三台无人机的飞行高度和位置,使三台无人机构成的平面大致水平,三台无人机大致呈正三角形;每台无人机相机的视场能够分别很好的观测到另外两台相机,确保在整个拍摄测量过程中三个相机的视场始终能拍到两个无人机,调整无人机的位置,使待测目标大致处于无人机围成的三角形的中心位置。
S2、对三台无人机上的相机进行实时标定,得到标定后的测量相机;
具体地,无人机上固定有LED标志灯,用于实时标定,对于每一台相机,视场中实时拍摄到另外两台相机的LED标志灯,这两个标志灯在图像中的成像可以用于相机的标定,因此可以实现三台相机的实时标定。
S3、基于双目交会测量原理和标定后的测量相机对待测目标进行位姿测量;
具体地,对于视场中的待测目标,可以使用双目交会测量原理,利用两台无人机搭载的相机,进行目标位姿的实时解算,通过双目交会测量得到待测目标的实时位置之后,就可以通过目标在世界坐标系中的几何关系,解算出待测目标实时的俯仰角、偏航角。
所述三台无人机上均设有LED标志灯,所述三台无人机处于同一水平面上,所述待测目标处于三台无人机围成的三角形的中心位置。
具体地,如图1所示,三个带有LED标志灯的无人机大致成正三角形分布,三个无人机大致在同一水平面上,待测目标大致处于正三角形的中心。每个无人机的相机视场中同时存在2个LED标志灯和待测目标。
进一步作为本方法的优选实施例,所述对三台无人机上的相机进行实时标定,得到标定后的测量相机这一步骤,其具体包括:
基于中心投射成像关系,得到相机坐标系方程;
获取无人机的实时数据并对相机坐标系方程进行求解,得到实时旋转矩阵;
基于实时旋转矩阵完成相机标定,得到标定后的测量相机。
具体地,对于每一个无人机的机载相机标定,由中心透视投影成像关系有:
其中,(X
摄像时被拍摄的无人机总是在相机前方,所以总是有Z
进一步作为本方法的优选实施例,所述相机坐标系方程具体如下式:
上式中,无人机在世界坐标系中的实时位置(X,Y,Z)由无人机的卫星定位系统GPS实时信息转换得到,(F
(3)式中未知量仅为旋转矩阵的9个元素r
进一步作为本方法的优选实施例,实时旋转矩阵R的表达式如下:
上式中,α、β、γ分别表示绕x、y、z轴转动的欧拉角。
即旋转矩阵的9个元素只有3个独立的变量。由于在实时成像时,图像中的1个无人机可以提供1组(3)式,如果视场中同时存在2个以上的相机,就可以获得4个以上的方程,可以解出实时的旋转角α、β、γ,进而可以得到实时的旋转矩阵R,从而可以实现多无人机测量系统的实时标定。注意到R的表达式代入(3)后得到的是非线性方程组,具体求解方法可以用高斯牛顿迭代法或者Levenberg_Marquardt等非线性优化算法进行搜索求解。
进一步作为本方法优选实施例,所述基于双目交会测量原理和标定后的测量相机对待测目标进行位姿测量这一步骤,其具体包括:
对于t
对于t
根据端点t
具体地,如图3所示,假设利用1号相机和2号相机进行交会测量。对于t
进一步作为本方法优选实施例,对于端点A
上式中,
其中,P
由于旋转矩阵R已经由(一)实时标定得到,所以对于超定方程组(5),可以直接使用最小二乘法进行求解出A
对于t
t
进一步作为本方法优选实施例,所述基于双目交会测量原理和标定后的测量相机对待测目标进行位姿测量这一步骤还包括解算目标姿态角,具体包括:
对于t
对于t
根据端点t
具体地,如图4所示,对t
上式中,(X
从而求出俯仰角。
令待测目标的投影向量为
进一步作为本方法的优选实施例,计算端点t
从而求出偏航角;
同理可以求出t
如图5所示,一种基于多无人机的目标位姿实时测量系统,包括:
无人机控制模块,用于控制三台无人机将待测目标包围;
标定模块,用于对三台无人机上的相机进行实时标定,得到标定后的测量相机;
测量模块,用于基于双目交会测量原理和标定后的测量相机对待测目标进行位姿测量。
上述方法实施例中的内容均适用于本系统实施例中,本系统实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做作出种种的等同变形或替换,这些等同的变形或替换均包含在本申请权利要求所限定的范围内。
- 一种基于多无人机的目标位姿实时测量方法及系统
- 基于反向投影法的单目运动目标位姿实时测量方法