一种电液复合驱动的粉料库清库机
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及水泥工业机械设备技术领域,具体涉及的是一种电液复合驱动的粉料库清库机。
背景技术
水泥是一种粉状水硬性无机胶凝材料。将其加水搅拌后成浆体,能在空气中硬化或者在水中更好的硬化,并能把砂、石等材料牢固地胶结在一起,是重要的建筑材料之一。水泥厂一般将水泥储藏于水泥库,由于水泥库漏水、气候影响、库内外温差等原因,水泥在水泥库内壁上板结,随着时间增长,水泥库内壁水泥板结块不断变厚,导致水泥库容积变小,最终使水泥无法流出,造成断料停产,极大地影响水泥生产效率。
目前针对此问题,传统方法采用人工清库,但清理结块不彻底,风险极大。并且现有的清库机的支撑架无法进行长度调节,受力承载效果较差,使得清库机过于笨重,使清库机在搬运、组装和使用方面极为不便,无法清理内部直径较大的水泥库。
有鉴于此,本申请人针对上述问题进行深入研究,遂有本案产生。
发明内容
本发明的主要目的在于提供一种电液复合驱动的粉料库清库机,改善整体机架的受力情况,使清库机轻量化,使得清库机在搬运、组装和使用等方面大为便捷化,可对大型或超大型水泥库库壁进行清理,并且可分别清扫不同硬度的水泥结块,提高水泥库的清扫效率。
为了达成上述目的,本发明的解决方案是:
一种电液复合驱动的粉料库清库机,其中,包括主支架部,支撑臂机构,伸缩横臂机构以及组合清扫机构;所述主支架包括主支架,卷盘,轴承座,底部支架,竖臂,第一绳索以及液压管,所述主支架设在轴承座上,所述轴承座通过底部支架固定于水泥库的顶部,所述卷盘设在主支架上端,所述竖臂安装在主支架下端,所述卷盘上设有第一液压马达,所述支撑臂机构设在竖臂中部;
所述伸缩横臂机构包括伸缩臂和第一导向轮,所述伸缩臂的一端与竖臂铰接,伸缩臂的另一端安装第一导向轮,伸缩臂的中部与支撑臂机构连接,所述竖臂上还设有第二导向轮和第三导向轮,所述液压管的一端连接在卷盘上且另一端绕过第二导向轮和第一导向轮并与组合清扫机构连接,所述第一绳索的一端连接在卷盘上且另一端绕过第三导向轮和伸缩横臂机构并与组合清扫机构连接,所述组合清扫机构包括振动清扫装置与旋转击打清扫装置。
进一步的,所述伸缩臂包括依次套接在一起的第一横臂,第二横臂,第三横臂,第四横臂;所述伸缩横臂机构还包括第一液压缸,第二液压缸,第三液压缸以及横梁,所述第一横臂的一端与竖臂铰接,所述第一液压缸设在第一横臂上,第一液压缸的活塞杆与第二横臂连接,所述第二液压缸设在第二横臂上,第二液压缸的活塞杆与第三横臂连接,所述第三液压缸设在第三横臂上,第三液压缸的活塞杆与第四横臂连接,所述横梁穿过第一导向轮与第四横臂的末端连接。
进一步的,所述支撑臂机构包括手动绞盘,第二绳索,第三绳索,支撑臂,第四导向轮以及动滑轮;所述手动绞盘安装在主支架上,所述支撑臂的一端与竖臂铰接且另一端与第四导向轮转动连接,所述主支架上还设有第五导向轮,所述第二绳索的首端缠绕于手动绞盘上,末端绕过第五导向轮和第四导向轮并与动滑轮连接,所述第三绳索的一端固定在第一横臂上且另一端绕过动滑轮固定在第四横臂上。
进一步的,所述支撑臂机构还包括第四绳索以及第四液压缸,所述第四液压缸设在主支架的下方,所述第四绳索的一端与竖臂连接,另一端绕过第四液压缸活塞杆的头部并与支撑臂的中部连接。
进一步的,所述组合清扫机构还包括上支架,中支架以及下支架,所述上支架上安装有若干个第六导向轮,所述第一绳索的末端依次绕过第三导向轮、横梁的左端、第六导向轮并和横梁的右端连接,所述上支架和中支架之间设有齿轮副和驱动马达,所述下支架安装在中支架的下端,所述下支架的一侧安装有振动清扫装置,且另一侧旋转击打清扫装置。
进一步的,所述振动清扫装置包括若干个上固定块,下固定块,调节块以及振动件,所述振动件的上端与上固定块连接,下端与下固定块连接,所述下固定块与下支架铰接,所述调节块与中支架连接,所述上固定块与调节块铰接,所述调节块上设有若干个水平设置的调节孔。
进一步的,所述旋转击打清扫装置包括旋转外壳,第二液压马达以及转盘,所述旋转外壳与液压管连接,所述第二液压马达设在旋转外壳上,所述第二液压马达的动力输出端与转盘连接,所述转盘沿圆周方向均匀连接有若干个链条。
进一步的,还包括液压站和控制柜,所述第一液压马达,第二液压马达、第四液压缸以及液压管分别与液压站连接,所述振动件和驱动马达分别通过控制线与控制柜相连。
工作时,本发明通过液压站和控制柜控制组合清扫机构的工作,当遇到较硬水泥结块时,使用振动清扫装置进行清扫,即控制柜控制驱动马达带动齿轮副旋转,进而带动中支架和下支架旋转,使振动件到达预定位置,再通过第一液压马达驱动卷盘收放液压管和第一绳索调节组合清扫机构的高度,使其到达指定位置进行清扫,同时也可以使用手动绞盘和第四液压缸对伸缩臂的角度进行微调,使用第一液压缸、第二液压缸、第三液压缸对伸缩臂的长度进行调节;当遇到较软水泥结块时,使用旋转击打清扫装置进行清扫,即控制柜控制驱动马达带动齿轮副旋转,进而带动中支架和下支架旋转,使旋转击打清扫装置到达预定位置,再通过第一液压马达驱动卷盘收放液压管和第一调节组合清扫机构的高度,使其到达指定位置进行清扫,同时也可以使用手动绞盘和第四液压缸对伸缩臂的角度进行微调,使用第一液压缸、第二液压缸、第三液压缸对伸缩臂的长度进行调节。
与现有技术相比,本发明的有益效果在于,本发明能够适用于不同直径尺寸的水泥库(包括大型或超大型水泥库),适用范围更广;还能够对组合清扫机构的位置进行精确调节,进一步提高清库效率。并且采用支撑臂,有效改善了清库机竖臂的受力情况,使清库机轻量化,使得清库机在搬运、组装和使用等方面大为便捷化。此外组合清扫机构分为振动清扫装置与旋转击打清扫装置两部分,可以清扫不同硬度的水泥结块,提高水泥库的清扫效率。
附图说明
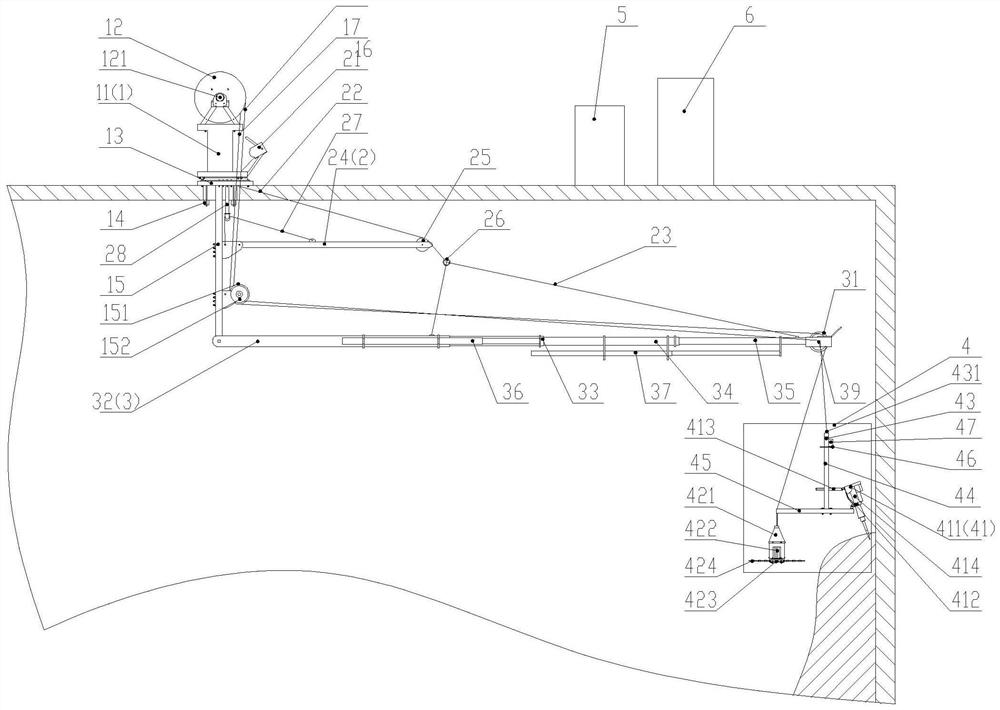
图1是本发明的正视结构示意图。
图2是本发明的侧视结构示意图。
图3是本发明的俯视结构示意图。
图中:
主支架部-1;主支架-11;卷盘-12;第一液压马达-121;
轴承座-13;底部支架-14;竖臂-15;第二导向轮-151;
第三导向轮-152;第一绳索-16;液压管-17;支撑臂机构-2;
手动绞盘-21;第二绳索-22;第三绳索-23;支撑臂-24;
第四导向轮-25;动滑轮-26;第四绳索-27;第四液压缸-28;
伸缩横臂机构-3;第一导向轮-31;第一横臂-32;第二横臂-33;
第三横臂-34;第四横臂-35;第一液压缸-36;第二液压缸-37;
第三液压缸-38;横梁-39;组合清扫机构-4;振动清扫装置-41;
上固定块-411;下固定块-412;调节块-413;振动件-414;
旋转击打清扫装置-42;旋转外壳-421;第二液压马达-422;
转盘-423;链条-424;上支架-43;第六导向轮-431;中支架-44;
下支架-45;齿轮副-46;驱动马达-47;液压站-5;控制柜-6。
具体实施方式
为了进一步解释本发明的技术方案,下面通过具体实施例来对本发明进行详细阐述。
如图1-3所示,一种电液复合驱动的粉料库清库机,包括主支架部1,支撑臂机构2,伸缩横臂机构3以及组合清扫机构4;主支架部1主要负责支撑清库机整体,主支架部1包括主支架11,卷盘12,轴承座13,底部支架14,竖臂15,第一绳索16以及液压管17,主支架11设在轴承座13上,轴承座13通过底部支架14固定于水泥库的顶部,主支架11可通过轴承座13内安装的轴承在水平面方向进行周向旋转,从而对清库机整体机架和清理方向进行转动调节,卷盘12设在主支架11上端,竖臂15安装在主支架11下端,卷盘12上设有驱动卷盘12转动的第一液压马达121,支撑臂机构2设在竖臂15中部;伸缩横臂机构3包括伸缩臂和第一导向轮31,伸缩臂的一端与竖臂15铰接,伸缩臂的另一端安装第一导向轮31,伸缩臂的中部与支撑臂机构2连接,支撑臂机构2能够对伸缩臂进行辅助支撑,并对伸缩横臂机构3进行角度上的微调,同时改善伸缩横臂机构3的受力情况,增强清库机的整体结构强度。竖臂15上还设有第二导向轮151和第三导向轮152,液压管17的一端连接在卷盘12上且另一端绕过第二导向轮151和第一导向轮31并与组合清扫机构4连接,第一绳索16的一端连接在卷盘12上且另一端绕过第三导向轮152和伸缩横臂机构3并与组合清扫机构4连接,组合清扫机构4包括振动清扫装置41与旋转击打清扫装置42,振动清扫装置41主要用于清扫较硬的水泥结块,旋转击打清扫装置42主要用于清扫较软的水泥结块。
采用上述结构后,清库时,轴承座13对清库机进行周向转动,伸缩横臂机构3可根据水泥库的直径长度在横向长度上对伸缩臂进行伸缩调节,以调节组合清扫机构4的横向距离,然后组合清扫机构4根据清扫需求选择相应的清扫装置,第一液压马达121驱动卷盘12转动,收放液压管17和第一绳索16以调节组合清扫机构4的高度,使其到达指定位置进行清扫,同时还可以通过支撑臂机构2对伸缩横臂机构3的角度进行微调,保证组合清扫机构4能够更加精确的对准需要清扫的位置,进一步提高清库效率。
优选的,在本实施例中,伸缩臂包括依次套接在一起的第一横臂32,第二横臂33,第三横臂34,第四横臂35;伸缩横臂机构3还包括第一液压缸36,第二液压缸37,第三液压缸38以及横梁39,第一横臂32的一端与竖臂15铰接,第一液压缸36设在第一横臂32上,第一液压缸36的活塞杆与第二横臂33连接,第二液压缸37设在第二横臂33上,第二液压缸37的活塞杆与第三横臂34连接,第三液压缸38设在第三横臂34上,第三液压缸38的活塞杆与第四横臂35连接,横梁39穿过第一导向轮31与第四横臂35的末端连接。采用上述结构后,通过个液压缸驱动各横臂进行伸缩运动,从而对伸缩臂的横向长度进行自动调节,使伸缩臂能够适用于不同直径尺寸的水泥库,调节更加灵活,适用范围更广。并且通过液压缸驱动,能够使伸缩臂伸缩更加平稳,避免组合清扫机构4在横移过程中产生晃动,避免组合清扫机构4与水泥库侧壁发生碰撞现象,提高设备的使用寿命。
优选的,在本实施例中,支撑臂机构2包括手动绞盘21,第二绳索22,第三绳索23,支撑臂24,第四导向轮25以及动滑轮26;手动绞盘21安装在主支架11上,支撑臂24的一端与竖臂15铰接且另一端与第四导向轮25转动连接,主支架11上还设有第五导向轮111,第二绳索22的首端缠绕于手动绞盘21上,末端绕过第五导向轮111和第四导向轮25并与动滑轮26连接,第三绳索23的一端固定在第一横臂32上且另一端绕过动滑轮26固定在第四横臂35上。采用上述结构后,通过转动手动绞盘21收房第二绳索22,可对动滑轮26的上下位置进行调节,当动滑轮26的位置发生改变时可拉动第三绳索23并带动伸缩臂进行上下偏摆,从而调整竖臂15和伸缩臂之间的夹角,继而对组合清扫机构4的位置进行微调,保证组合清扫机构4能够更加精确的对准需要清扫的位置,进一步提高清库效率。
优选的,支撑臂机构2还包括第四绳索27以及第四液压缸28,第四液压缸28设在主支架11的下方,第四液压缸28的活塞杆上可设置导向轮,第四绳索27的一端与竖臂15连接,另一端绕过第四液压缸28活塞杆的头部的导向轮并与支撑臂24的中部连接。采用上述结构后,通过第四液压缸28驱动活塞杆升降运动带动拉收第四绳索27,以驱动支撑臂24的前端进行上下偏摆,支撑臂24的前端在上下偏摆的过程中,第四导向轮25在高度位置上可进行略微调节,从而对动滑轮26的高度位置进行微调,继而对组合清扫机构4的位置进行更加精准和微小的调节,保证组合清扫机构4能够更加精确的对准需要清扫的位置,进一步提高清库效率。此外,支撑臂24在摆动的过程中可对第三绳索23的张紧度进行调节,使第三绳索23具有更加的张紧状态,能够提供更强的拉力,进一步提高本发明的整体结构强度。
优选的,组合清扫机构4还包括上支架43,中支架44以及下支架45,上支架43上安装有若干个均匀设置的第六导向轮431,第一绳索16的末端依次绕过第三导向轮152、横梁39的左端、第六导向轮431并和横梁39的右端连接,上支架43和中支架44之间设有齿轮副46和驱动马达47,下支架45安装在中支架44的下端,下支架45的一侧安装有振动清扫装置41,且另一侧旋转击打清扫装置42。采用上述结构后,上支架43与横梁39之间通过第一绳索16连接,形成两侧对称的调节固定结构,有利于上支架43的两侧受力更加均匀,保持组合清扫机构4的平衡。并且通过对第一绳索16进行放收可调节上支架43和横梁39之间两侧的绳索长度,从而对组合清扫机构4的高度位置进行调节,调节过程更加便捷,并且调节精度更高也更加平稳。此外,上支架43上设有若干个对第一绳索16进行导向的第六导向轮431,使第一绳索16滑动更加平稳。
优选的,振动清扫装置41包括若干个上固定块411,下固定块412,调节块413以及振动件414,振动件414的振动端可连接振动尖杆,振动件414振动时,通过振动尖杆对较硬的水泥结块进行撞击,从而将水泥结块由水泥库侧壁上清除。具体的,震动件可选用振动电机或者钻机,振动件414的上端与上固定块411连接,下端与下固定块412连接,下固定块412与下支架45铰接,调节块413与中支架44通过螺钉锁固连接,上固定块411与调节块413铰接,调节块413上设有若干个水平设置的调节孔。采用上述结构后,通过调整调节块413的横向安装位置,对上固定块411的横向位置进行调节,从改变振动件414的倾斜角度,以便振动尖杆能够适应不同的清除角度,适用范围更加广泛,清除效果更好。
优选的,旋转击打清扫装置42包括旋转外壳421,第二液压马达422以及转盘423,旋转外壳421与液压管17连接,第二液压马达422设在旋转外壳421上,第二液压马达422的动力输出端与转盘423连接,转盘423沿圆周方向均匀连接有若干个链条424。采用上述结构后,液压管17向第二液压马达422提供液压,使第二液压马达422驱动转盘423转动,转盘423转动的过程中甩动链条424,通过链条424将水泥库侧壁上较软的水泥结块进行清除。
优选的,为了方便液压与电路控制,本发明还包括液压站5和控制柜6,第一液压马达121,第二液压马达422、第四液压缸28以及液压管17分别与液压站5连接,振动件414和驱动马达47分别通过控制线与控制柜6相连。
工作时,本发明通过液压站5和控制柜6控制组合清扫机构4的工作,当遇到较硬水泥结块时,使用振动清扫装置41进行清扫,即控制柜6控制驱动马达47带动齿轮副46旋转,进而带动中支架44和下支架45旋转,使振动件414到达预定位置,再通过第一液压马达121驱动卷盘12收放液压管17和第一绳索16调节组合清扫机构4的高度,使其到达指定位置进行清扫,同时也可以使用手动绞盘21和第四液压缸28对伸缩臂的角度进行微调,使用第一液压缸36、第二液压缸37、第三液压缸38对伸缩臂的长度进行调节;当遇到较软水泥结块时,使用旋转击打清扫装置42进行清扫,即控制柜6控制驱动马达47带动齿轮副46旋转,进而带动中支架44和下支架45旋转,使旋转击打清扫装置42到达预定位置,再通过第一液压马达121驱动卷盘12收放液压管17和第一调节组合清扫机构4的高度,使其到达指定位置进行清扫,同时也可以使用手动绞盘21和第四液压缸28对伸缩臂的角度进行微调,使用第一液压缸36、第二液压缸37、第三液压缸38对伸缩臂的长度进行调节。
与现有技术相比,本发明的有益效果在于,本发明能够适用于不同直径尺寸的水泥库,适用范围更广;还能够对组合清扫机构4的位置进行精确调节,进一步提高清库效率。并且采用支撑臂24,有效改善了清库机竖臂15的受力情况,提高了整体的结构强度,继而提高本发明的使用寿命,减少事故意外的发生。此外组合清扫机构4分为振动清扫装置41与旋转击打清扫装置42两部分,可以清扫不同硬度的水泥结块,提高水泥库的清扫质量。
上述实施例和图式并非限定本发明的产品形态和式样,任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应视为不脱离本发明的专利范畴。
- 一种电液复合驱动的粉料库清库机
- 一种用于水泥库的智能库壁清库机